První program
Pojďme se nejdříve podívat na celý program:
1
2
3
4
5
6
7
8
#include "robotka.h"
void setup() {
rkConfig cfg;
rkSetup(cfg);
rkLedBlue(true); // tento řádek přidáš ty - zatím ne, nejprve si pročti tuto kapitolu!
}
Tak málo stačí, aby se tvoje Robotka probrala k životu, a dala ti to najevo!
Tak, a teď postupně:
#include příkazy
1
#include "robotka.h"
Soubor začíná #include příkazy, které určují, co všechno ve svém programu
můžeš používat. Nám zatím bude stačí pouze robotka.h.
Funkce
1
2
3
void setup() {
...
}
To, co vidíš zde, je funkce. Funkce jsou kusy kódu, které můžeš opakovaně
spustit tak, že znáš jejich jméno. Kód každé funkce je ohraničen složenými závorkami { a },
a uvnitř také odsazen.
Tato funkce se jmenuje setup, a Robotka ji sama spustí vždy po zapnutí.
Proměnné
1
rkConfig cfg;
Zde vytváříme proměnnou, tedy pojmenovaný kousek dat v našem programu.
Má to dvě části - datový typ (rkConfig) a jméno (cfg).
Datový typ udává, co za data se skrývá v naší proměnné. V případě rkConfig
je to nastavení celé Robotky,
mezi další typy, které budeme za chvilku používat patří:
int- celé číslo, např.42,float- číslo s desetinnou čárkou (pro účely programování desetinnou tečkou), např.3.14,bool- ano/ne, může nabývat pouze hodnottruenebofalse,std::string- textový řetězec, např."Ahoj!".
Jméno proměnné volíš ty. Mělo by to být něco, co vystihuje účel dané proměnné, aby se navzájem nepletly. Může obsahovat pouze písmena bez háčků a čárek, podtržítka a čísla, ale číslem nesmí začínat.
rkSetup
1
2
rkConfig cfg;
rkSetup(cfg);
Na řádku 5 je zavolání funkce, v tomto případě funkce pojmenované rkSetup. Tuto funkci jsme si
“přivezli” pomocí #include "robotka.h" na prvním řádku programu, což můžeš poznat podle toho,
že její jméno začíná na písmena rk.
Předáváme jí proměnnou s nastavením pojmenovanou cfg (zatím v nastavení nic neměníme).
rkSetup() je potřeba zavolat na začátku každého programu pro Robotku! Tato funkce zajistí,
že je pro vás vše řádně nastaveno a připraveno.
Tvůj kód
Konečně se dostáváme k tomu zajímavému, Robotka bude něco dělat!
1
rkLedBlue(true);
Přepiš tento řádek na správné místo do tvého programu (před }, která ukončuje
funkci setup - pokud nevíš kam, koukni se na celý program na začátku této kapitoly).
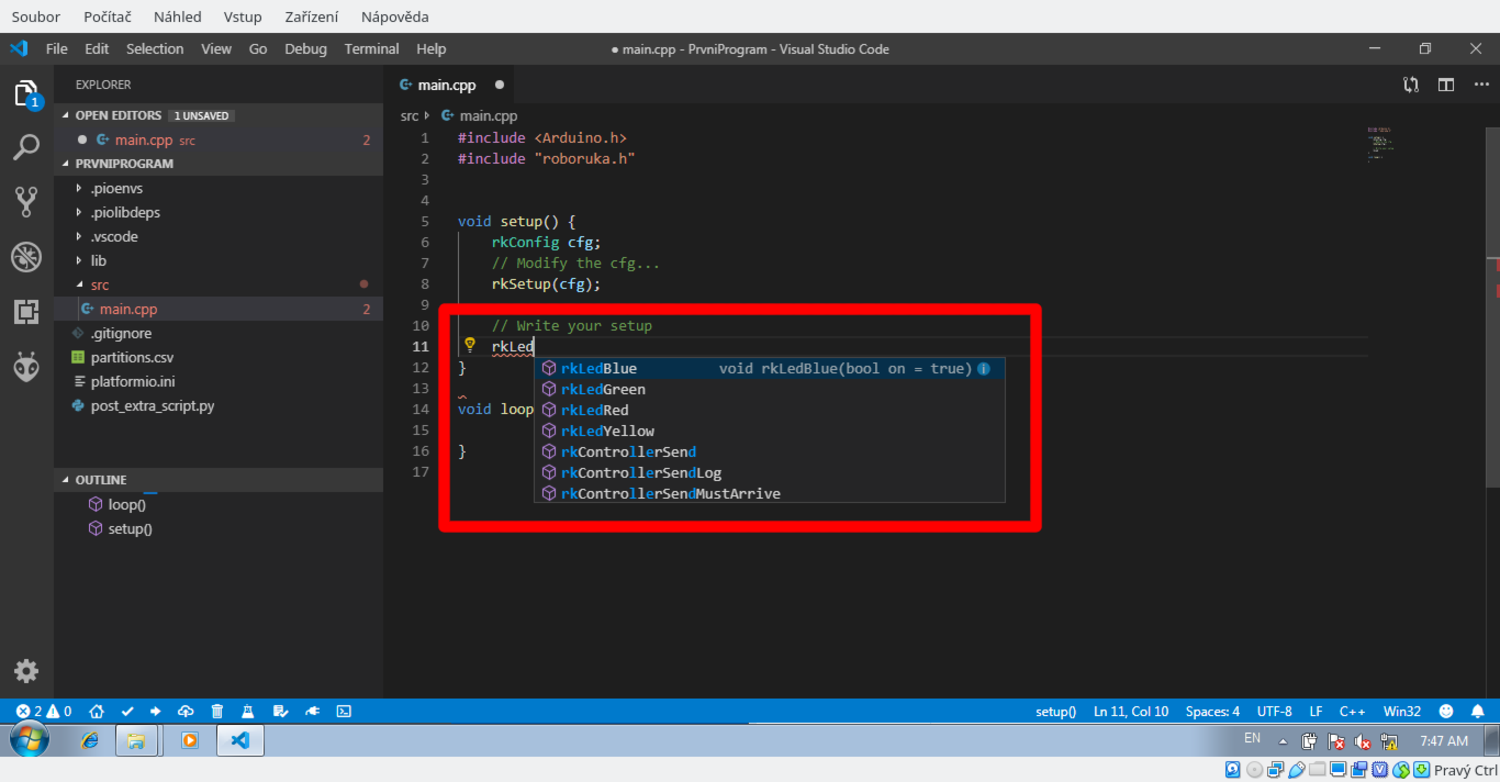
Všimni si, že při psaní ti VSCode napovídá. Stačí napsat rk a už uvidíš všechny metody, které můžeš používat na ovládání Robotky. Pokud se tak nestane nabídku vyvoláš stisknutím Ctrl + Space

Když na nějakou metodu najedeš myší, VSCode ti také ukáže, co daná metoda dělá. Všechny tyto informace najdeš také v dokumentaci.
Nyní program nahraj do Robotky kliknutím na šipku vlevo dole, stejně jako v kapitole Dálkové ovládání. Měla by se rozsvítit modrá LED.
Úkol 1
Zkus rozsvítit i ostatní barvy LED!
Použij napovídání ve VSCode a zavolej další funkce na rozsvícení ostatních LED.
1
2
3
4
5
6
7
8
9
10
11
#include "robotka.h"
void setup() {
rkConfig cfg;
rkSetup(cfg);
rkLedBlue(true);
rkLedGreen(true);
rkLedRed(true);
rkLedYellow(true);
}