Nový projekt
Robotka kromě dálkového ovládání zvládne dělat věci i úplně sama, když ji naprogramujeme.
Nejprve musíme založit nový projekt, ve kterém budeme programovat.
1
Stáhněte si ZIP se souborem příkladů pro Robotku a někam ho rozbalte tak, abyste ho našli.
Pokud vaše uživatelské jméno obsahuje diakritiku, tak nemůžete používat Plochu ani složku Dokumenty, ale musíte vytvořit například C:\Robotka\examples.
Pokud víte, co je to Git a umíte ho používat, můžete místo toho naklonovat náš repozitář.
2
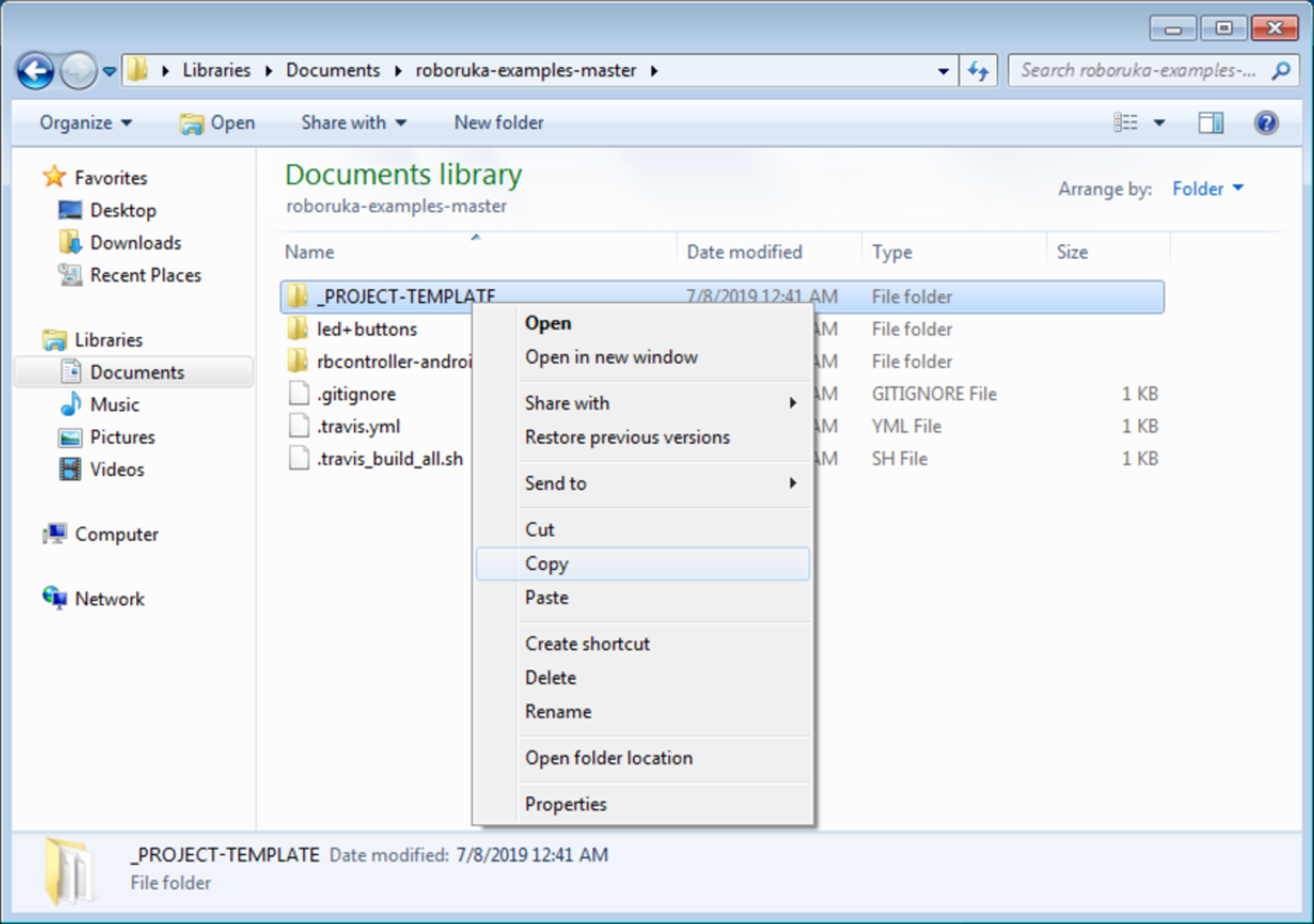
Najděte si v rozbaleném obsahu složku _PROJECT-TEMPLATE. Toto je šablona, na které budeme stavět
všechny programy pro Robotku. Celou ji zkopírujte někam jinam a pojmenujte třeba PrvniProgram.
Pamatujte si, kam jste ji zkopírovali.
3
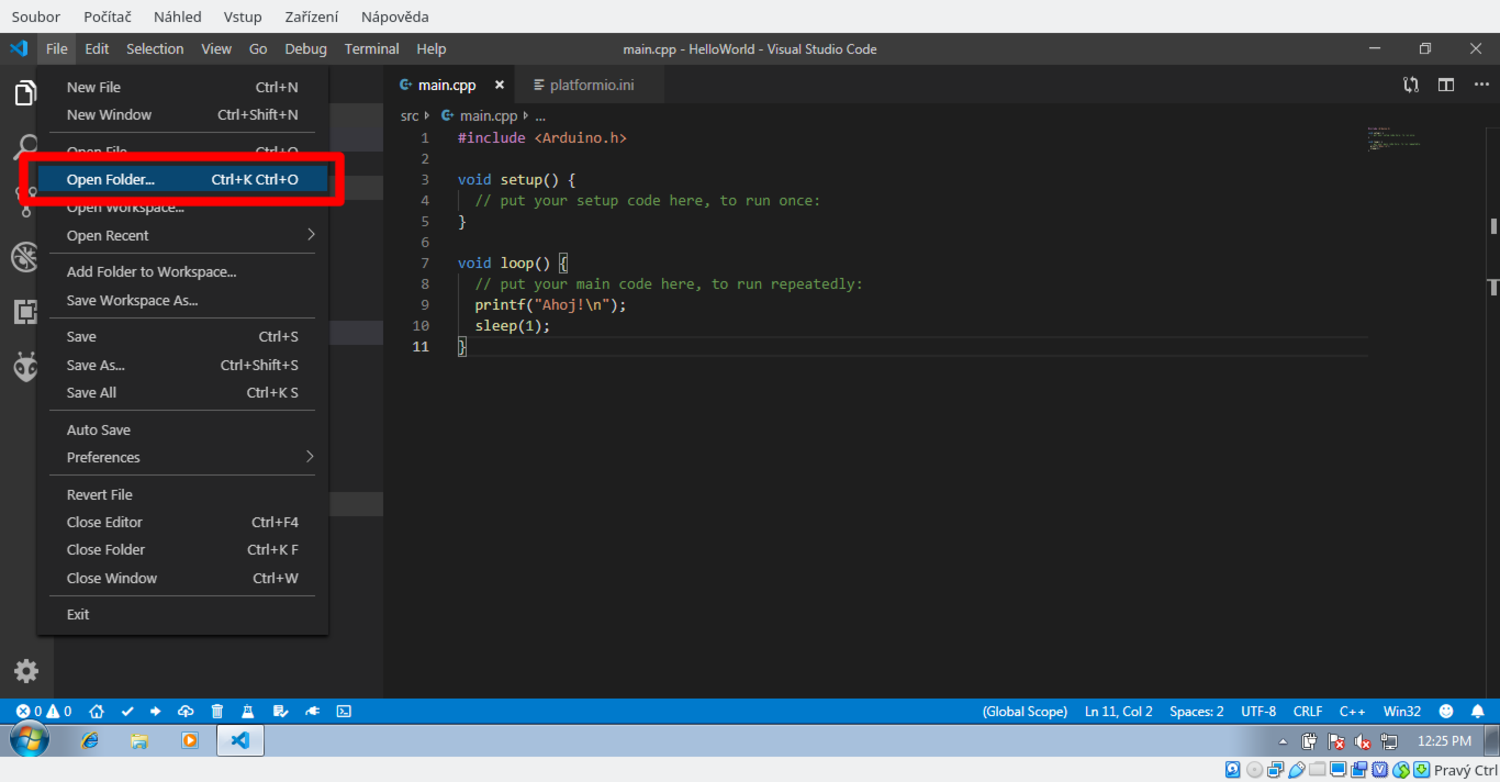
Ve File menu ve VSCode zvolte Open Folder… a otevřete složku PrvniProgram, kterou jste právě vykopírovali.

4
Po otevření projektu bude VSCode chvíli pracovat, počkejte, dokud text na dolní liště nezmizí.
5
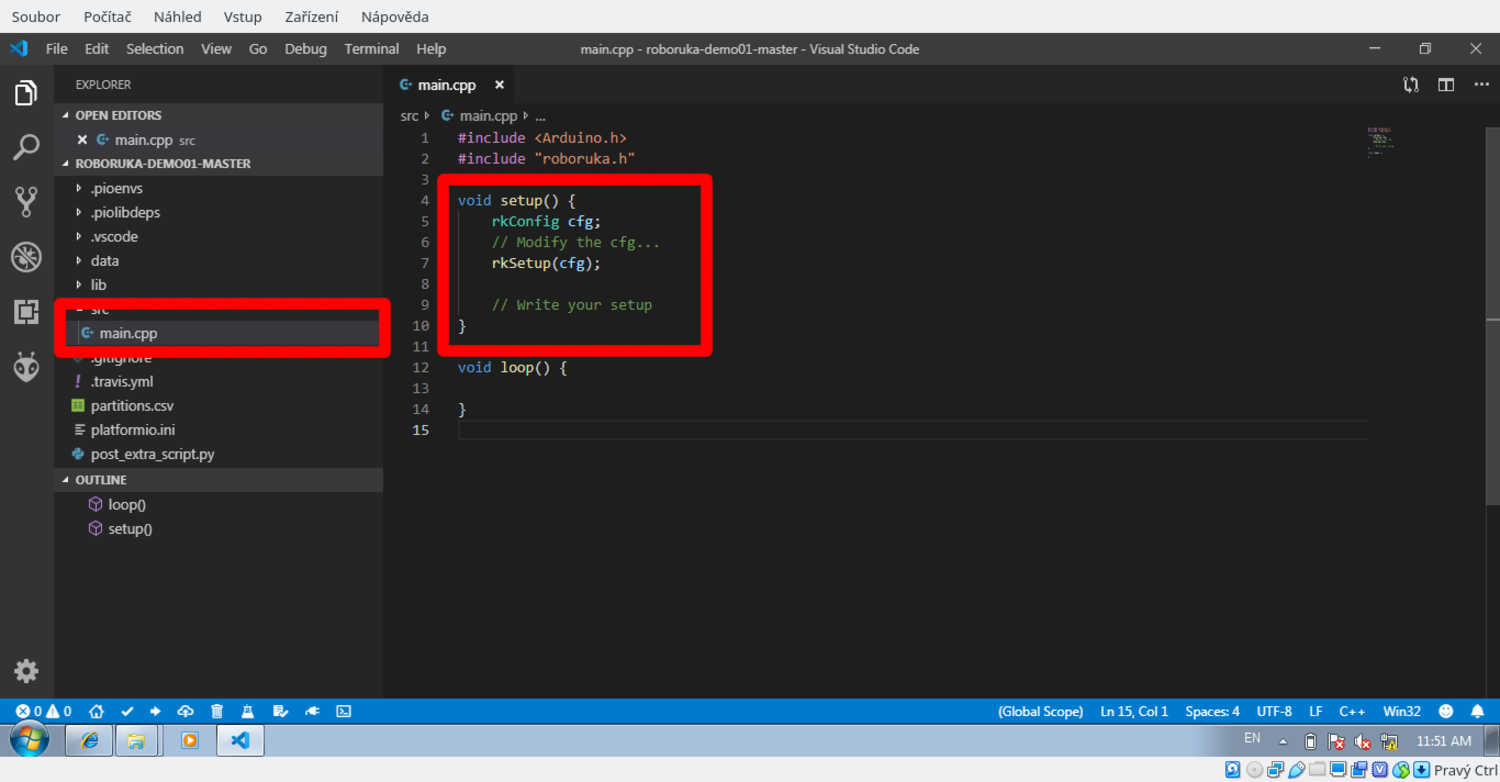
Otevřete soubor src/main.cpp. V něm je váš program, který budeme ho upravovat v další kapitole. Prozatím nic neměňte.
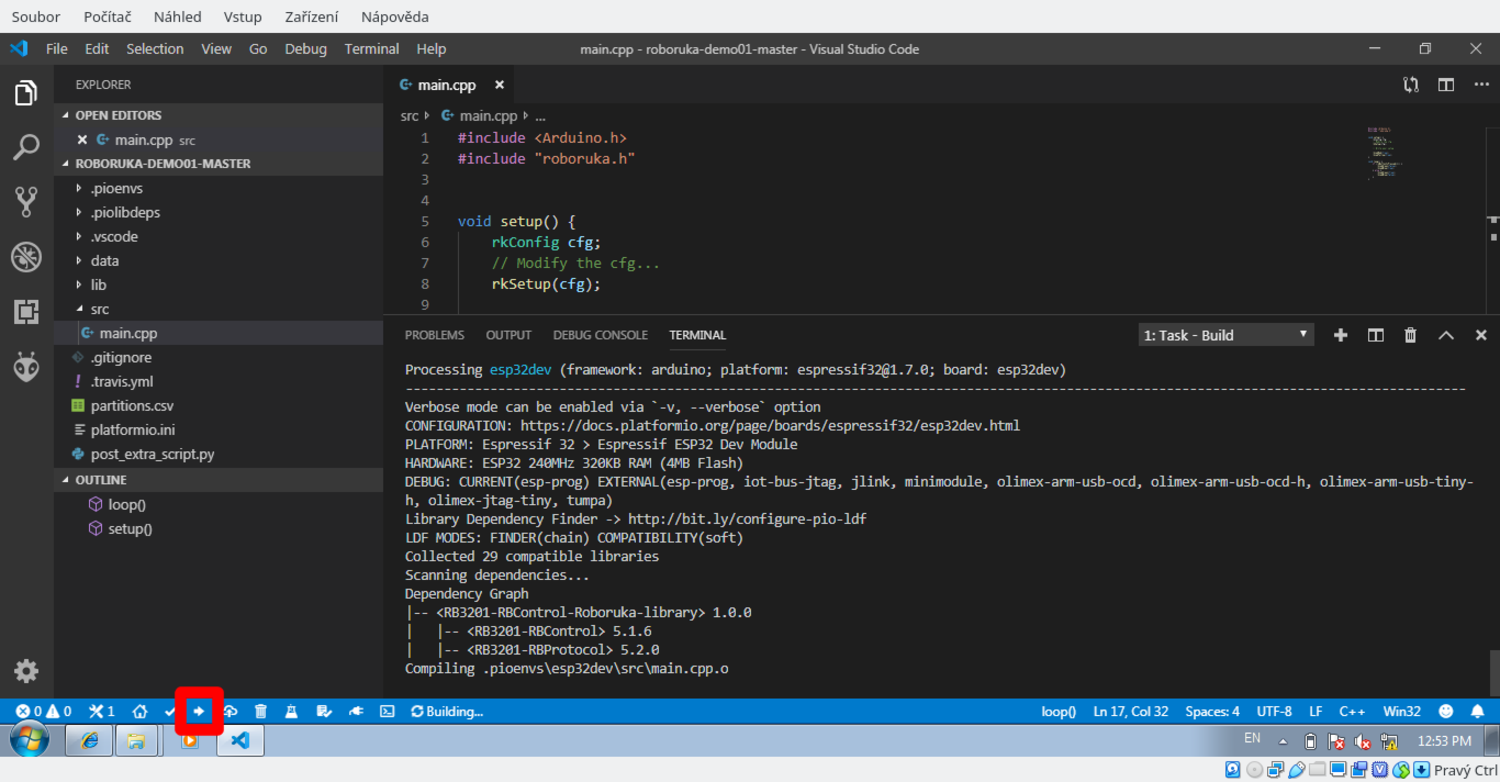
6
Kliknutím na šipku na dolní liště program zkompilujte a nahrajte do robota. Po nahrátí by terminál měl vypisovat něco velmi podobného,
jako na obrázku.
Robotka zatím nebude nic dělat, ale to změníme v další kapitole.