Návod na složení
Následující návod tě provede krok za krokem stavbou Robotky. Celá stavba je rozdělena do tří částí, které jsou dále rozděleny do několika dílčích kroků, jejichž pořadí je nutné dodržovat, aby se zamezilo nutnosti rozlamovat již slepené díly.
Obecné rady
Sestavení Robotky není náročné, některé kroky však vyžadují pečlivost. Čti proto návod pozorně a obzvlášť platí: dvakrát měř a jednou řež neboli dvakrát přikládej nasucho a jednou natírej lepidlem.
Pro sestavení Robotky budeš potřebovat:
- ostrý modelářský nebo zalamovací nůž,
- kousek smirkového papíru,
- křížový šroubovák,
- pájku,
- lepidlo na dřevo (Herkules).
Pokud nebude uvedeno jinak, všechny dřevěné dílky se lepí k sobě!
Lepení dílů k sobě
Všechny dílky obsahují zámečky, které ti umožní dílky přesně napozicovat a často vyloučí i špatné složení. Díky zámečkům si můžeš zkusit některé kroky prvně “nasucho” bez lepidla a následně po ověření toho, že do sebe zapadají, je můžeš natřít lepidlem.
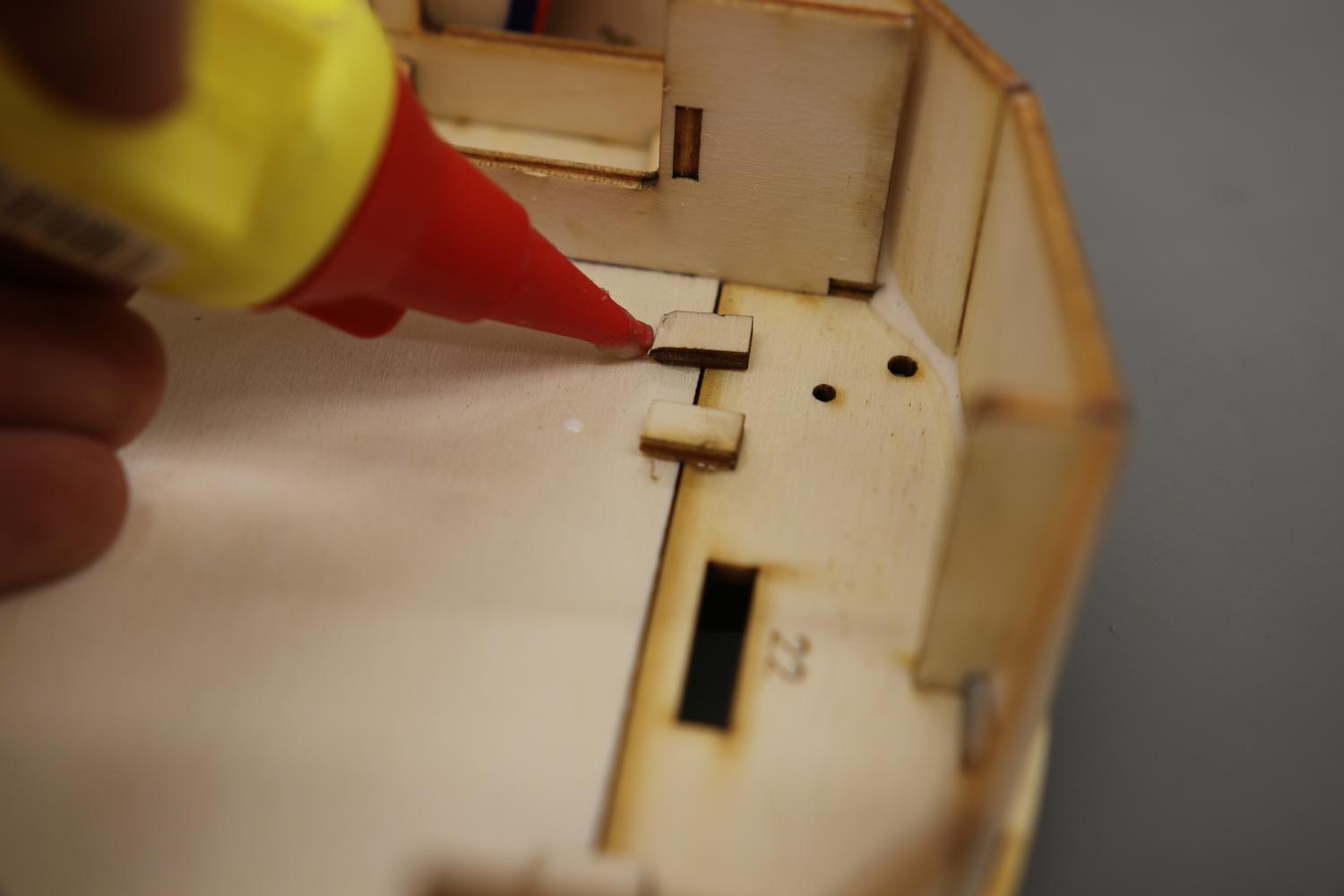
Na lepení dřeva k sobě používej lepidlo Herkules - s výhodou v malém balení s aplikátorem.

1
Lepidlo na lepení dřeva.
Při skládání nasucho si všimni, které plochy se sebe dotýkají - to jsou ty plochy, které musíš natřít lepidlem. A kolik dávat lepidla? Tak akorát, aby vyplnilo všechny mezery - po stlačení dílků by mělo ze spoje vytéci trochu lepidla, ne však příliš. Toto přebytečné lepidlo můžeš utřít kouskem hadru nebo papírovou utěrkou.
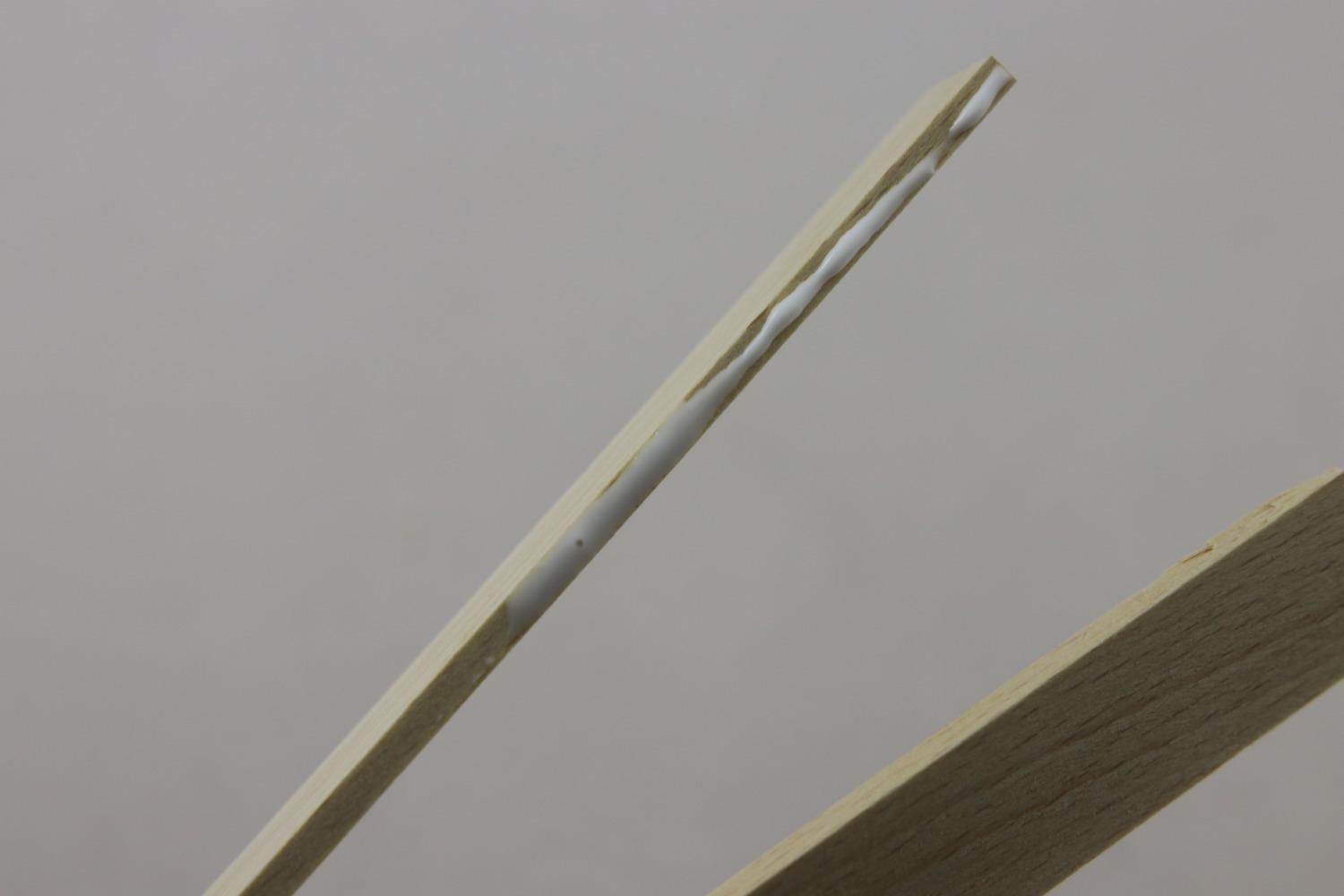
2
Nanesení lepidla na lepenou hranu.
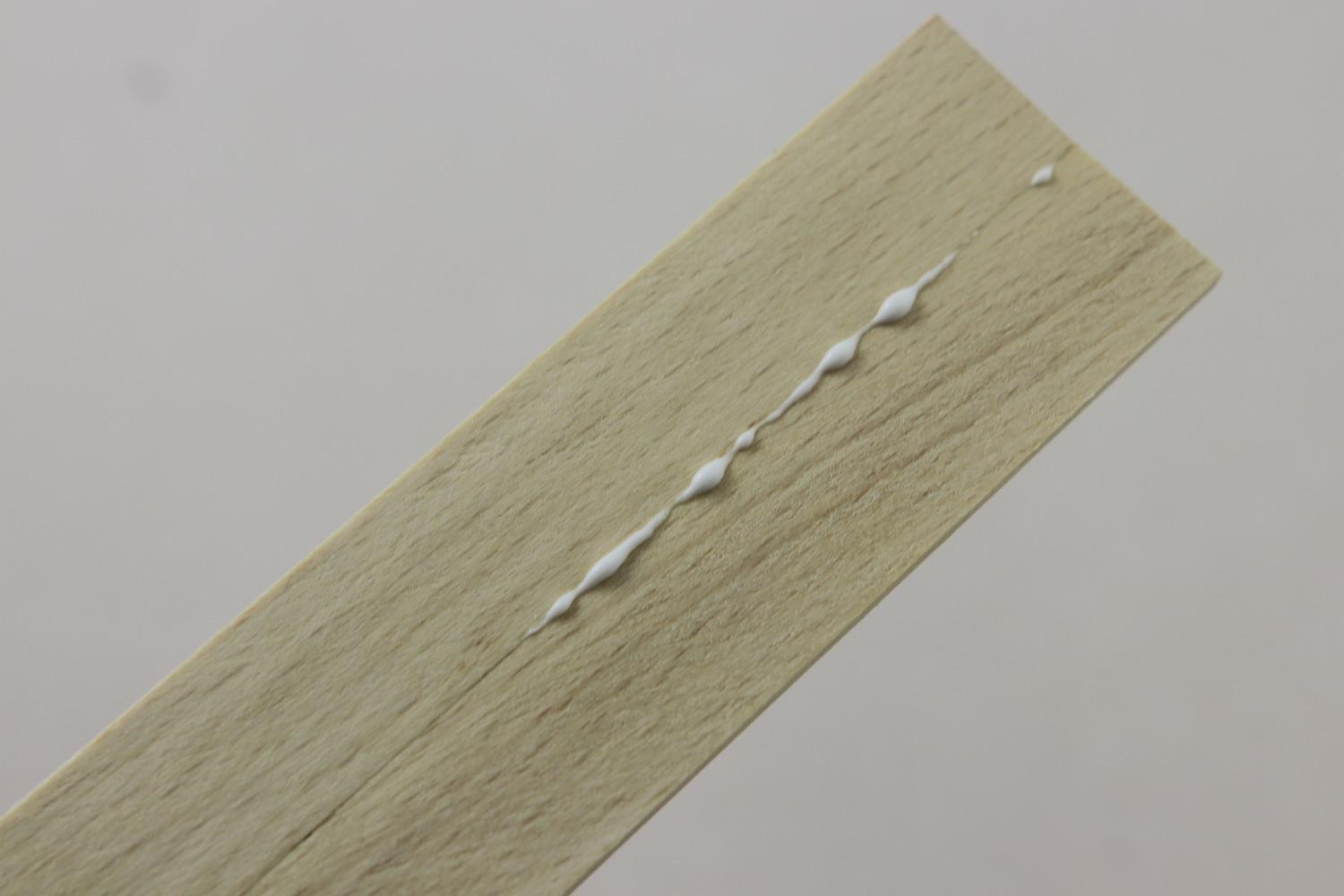
3
Správné množství vytlačeného lepidla.
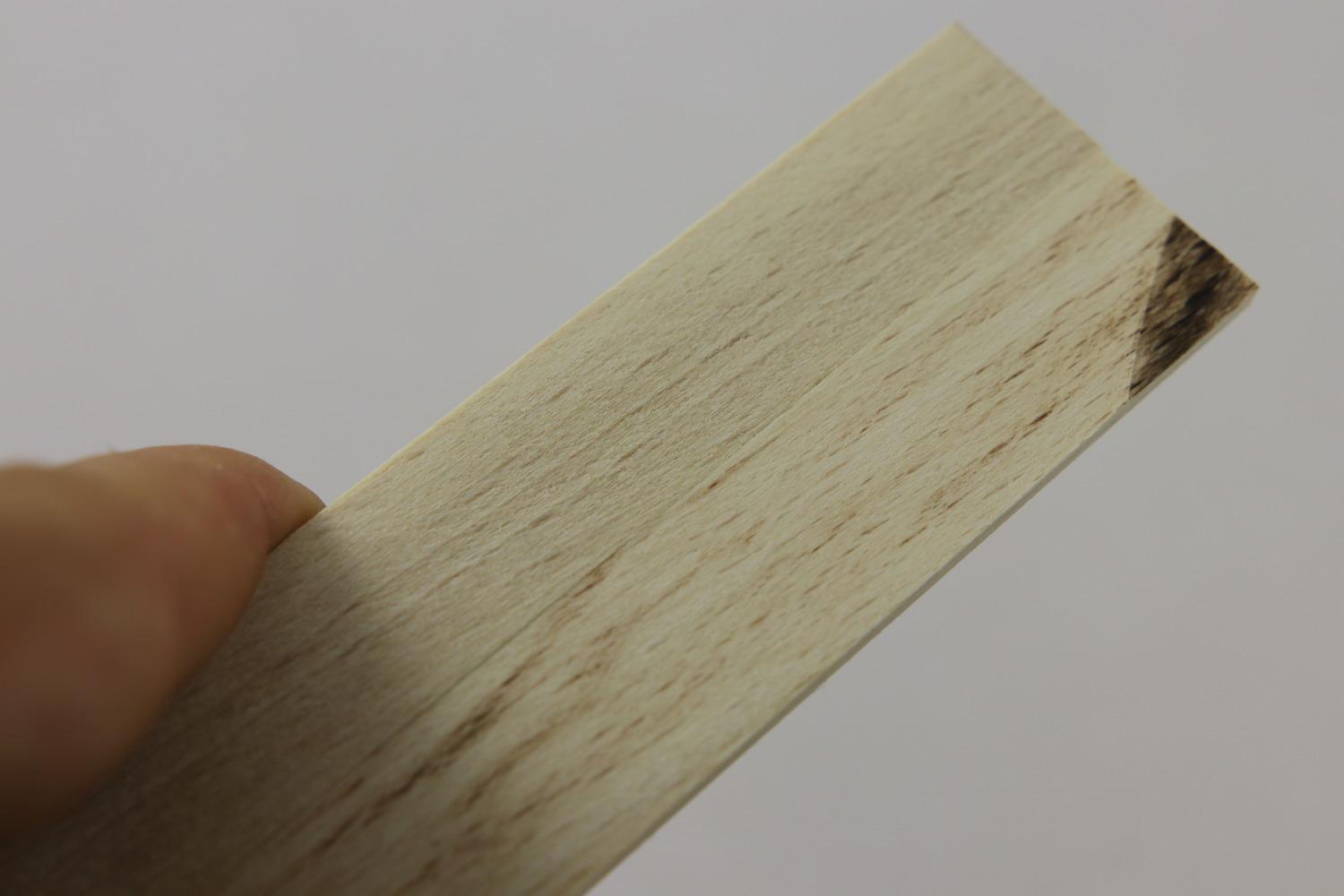
4
Málo lepidla - žádné se nevytlačilo.
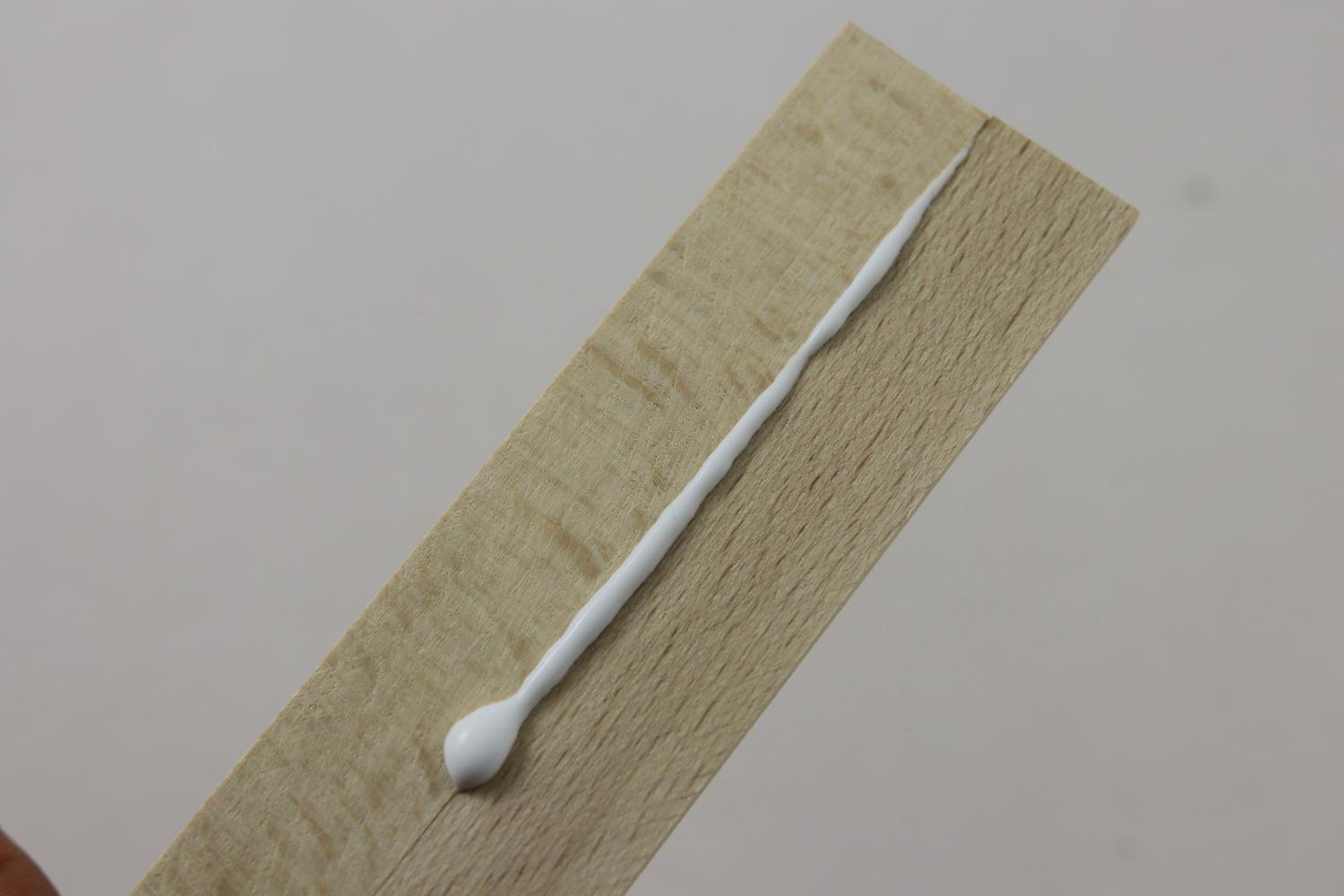
5
Příliš lepidla - většina ho byla vytlačena ven.
Koutový spoj
6

7
Správný koutový spoj
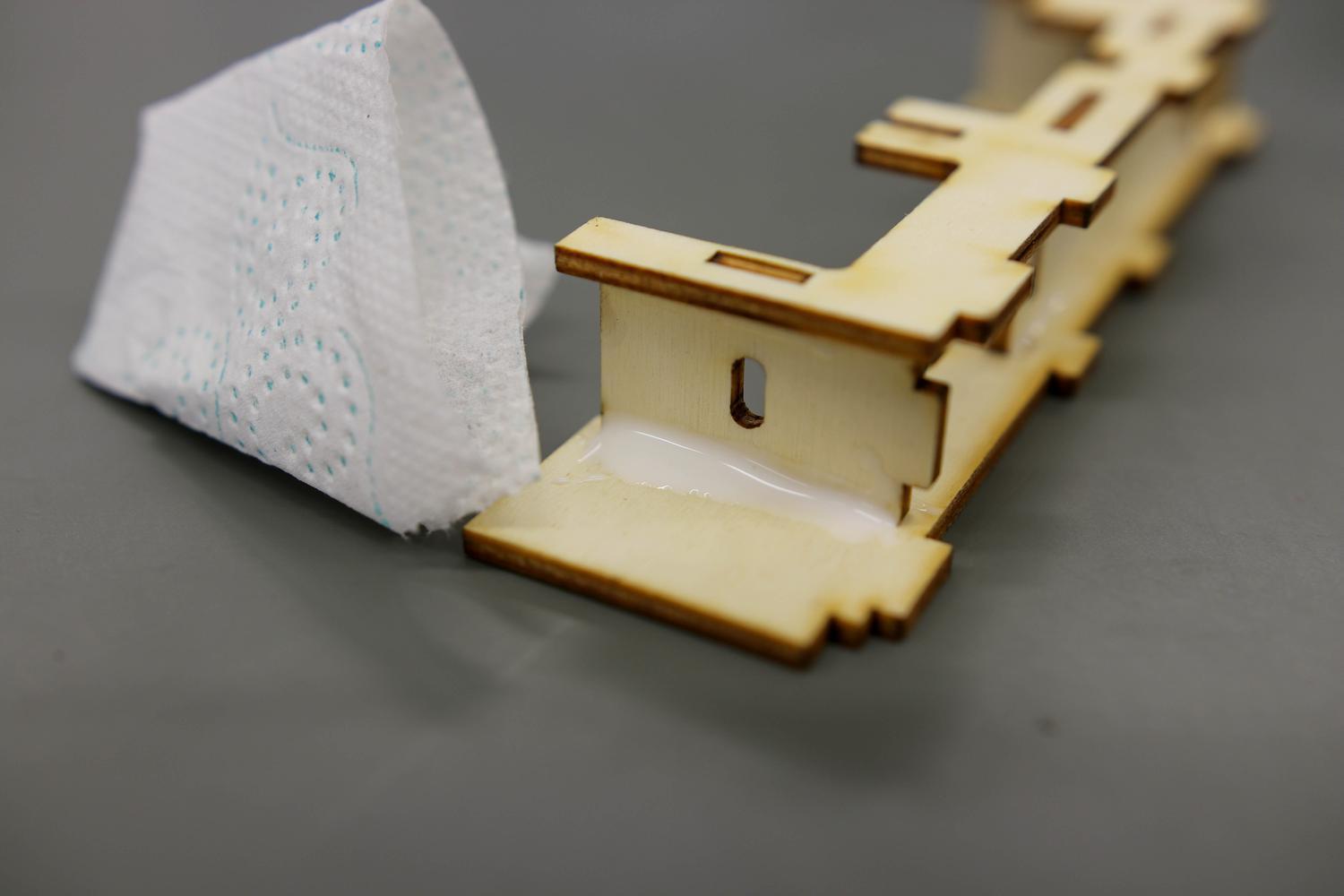
8
Pokud vým vyteče moc lepidla, odstraňte ho pomocí kapesníku
RBCX
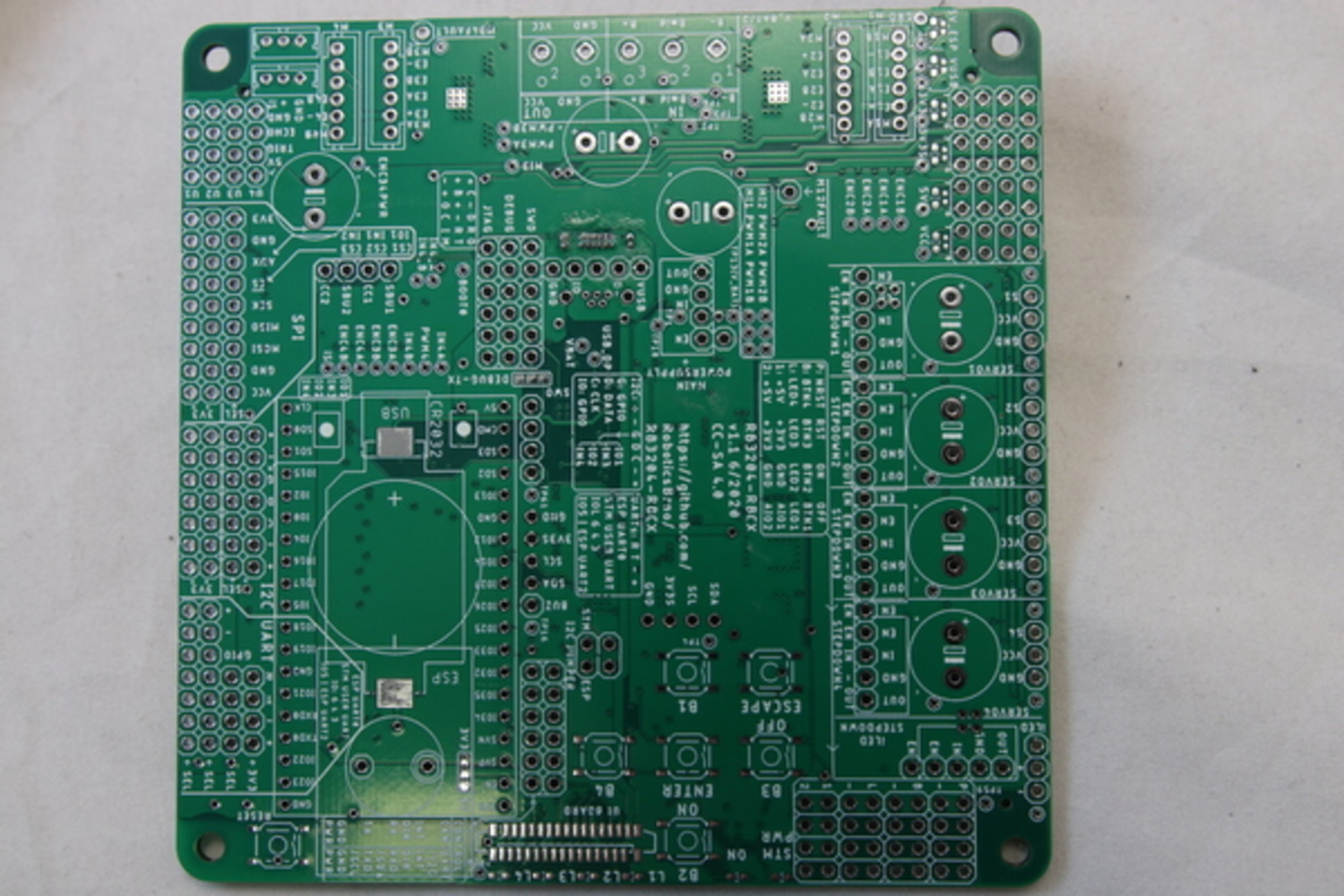
RBCX - řídicí elektronika je navržena jako univerzální deska pro řízení různých robotických platforem. Pro získání funkční elektroniky na provoz Robotky stačí osadit jen některé součástky.
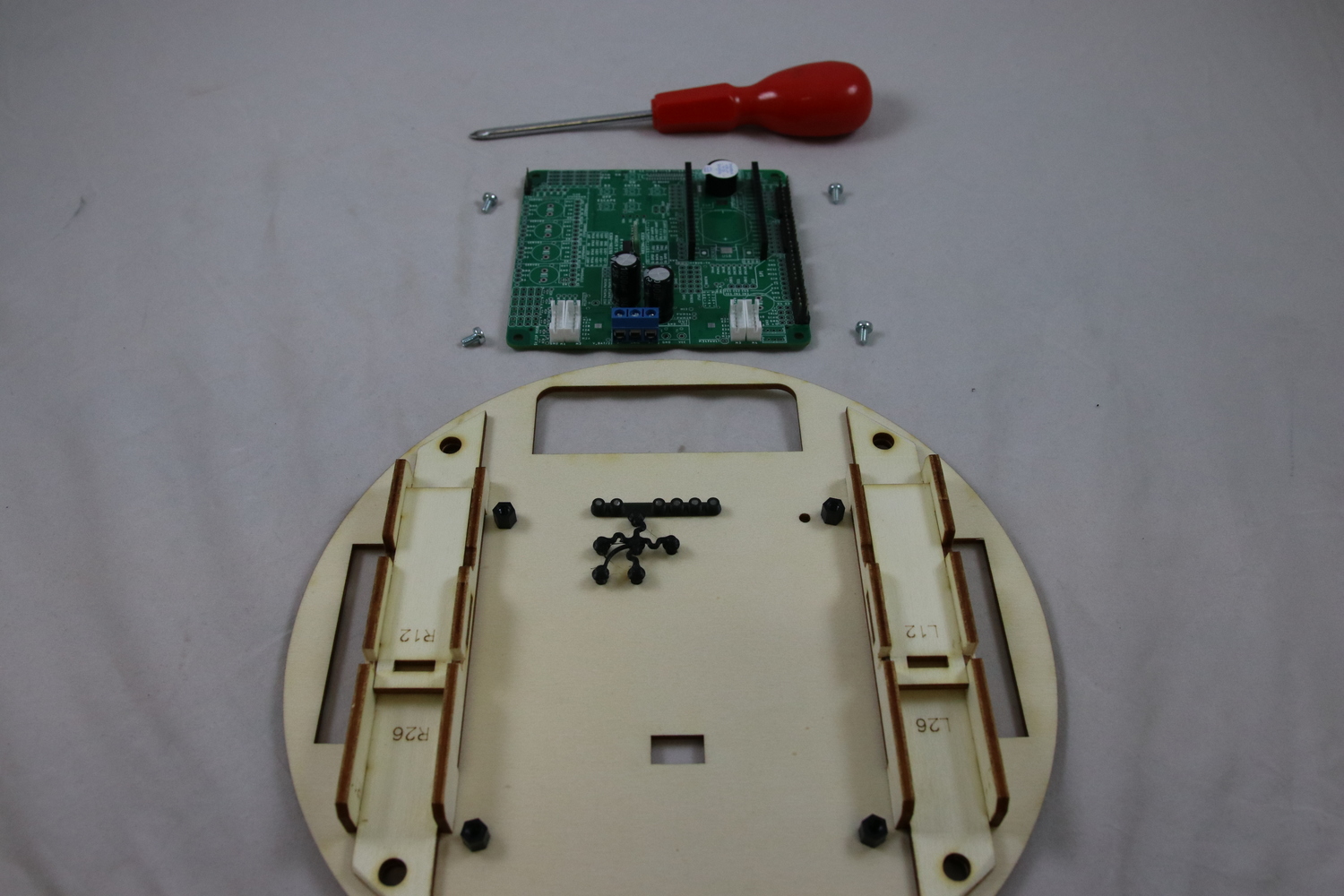
1
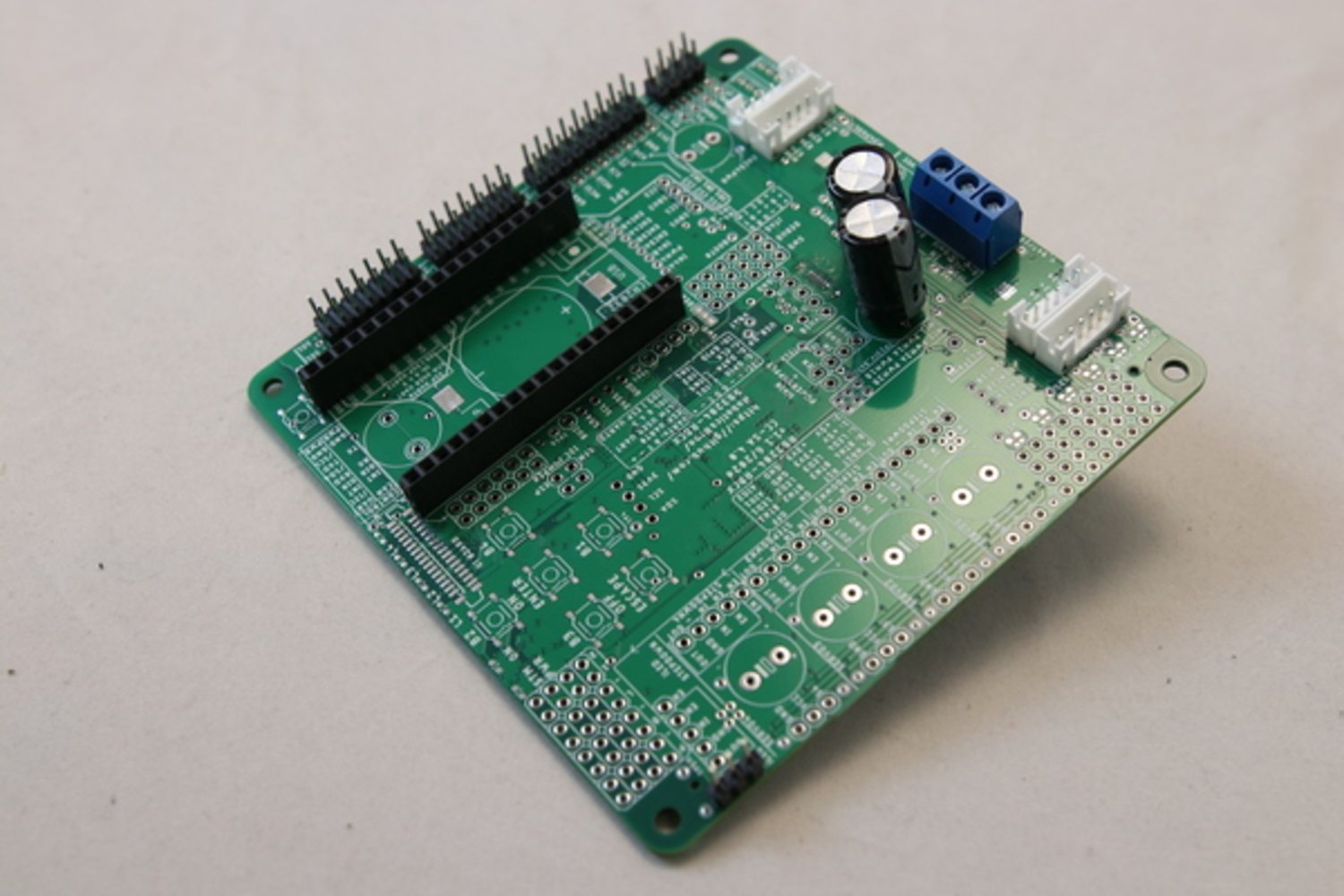
Nachystejte si DPS (desku plošných spojů), kterou jste dostali.
2
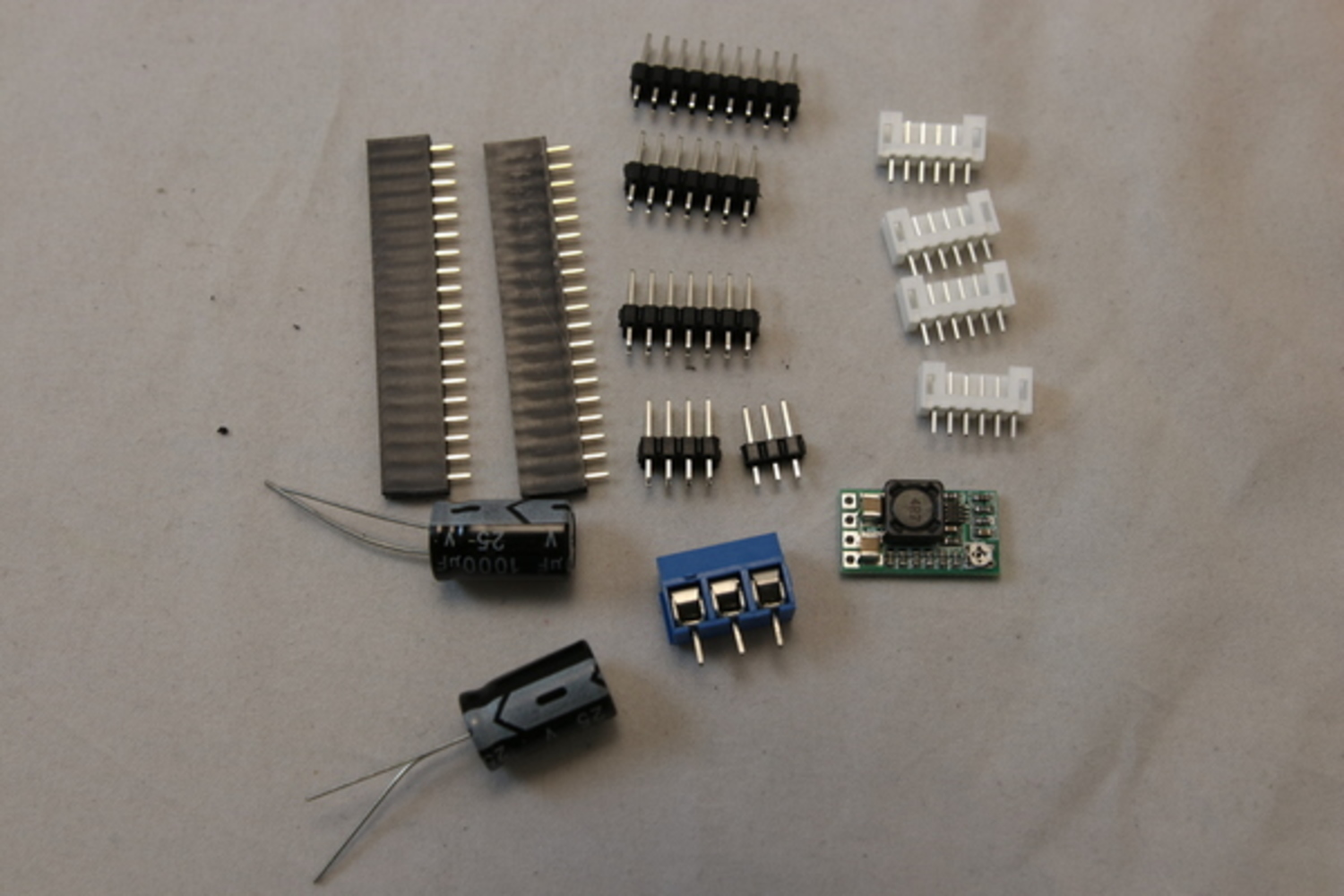
Zkontrolujte si, že máte všechny součástky jako na obrázku.
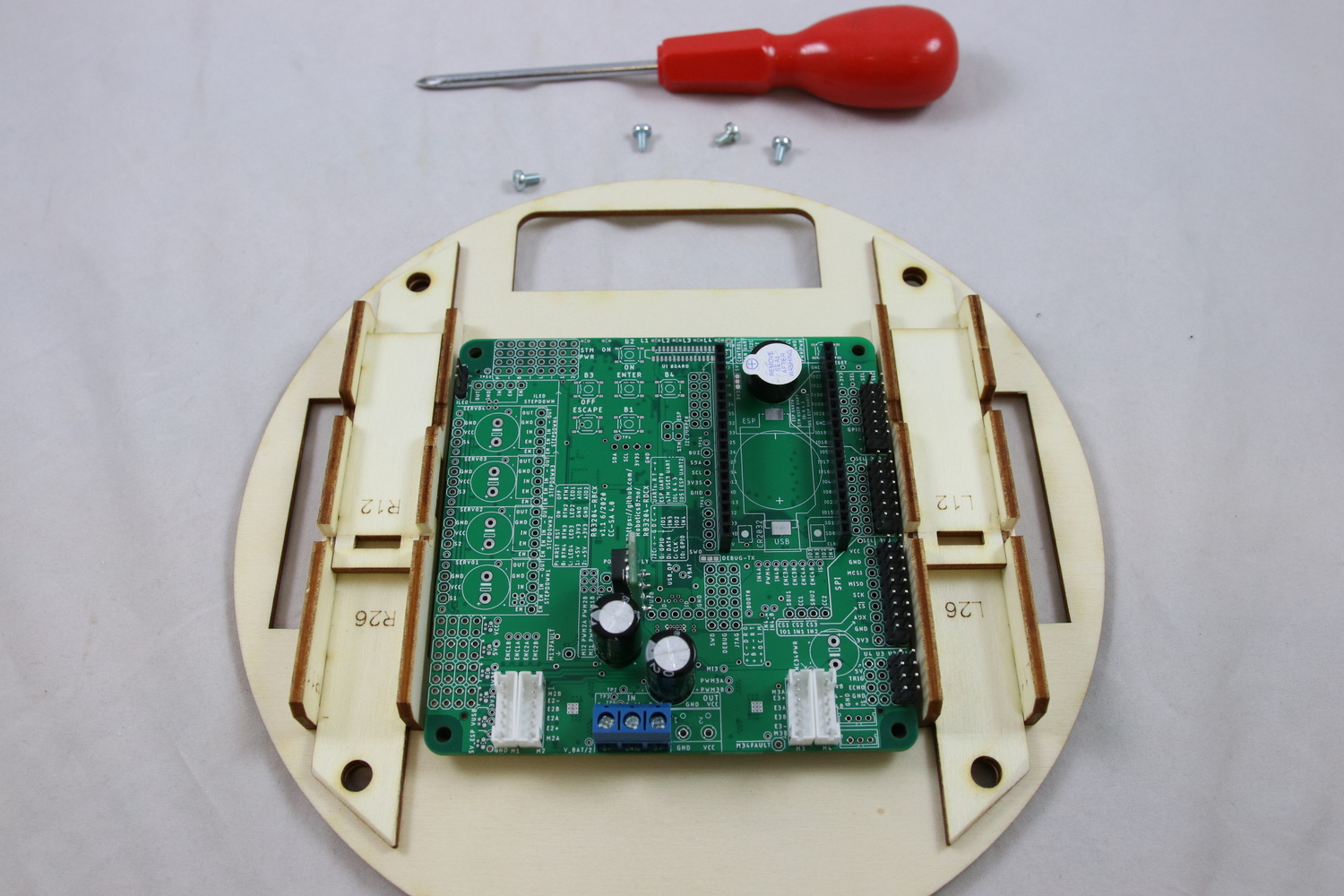
3
Součástky zasuňte do desky podle obrázku.

4
Ještě jednou si zkontrolujte, že součástky máte v desce zasunuté přesně takto. Pozor na správné otočení (polaritu) kondenzátorů, pozor na orientaci modré patice a bílých konektorů. Vše si důkladně zkontrolujte.
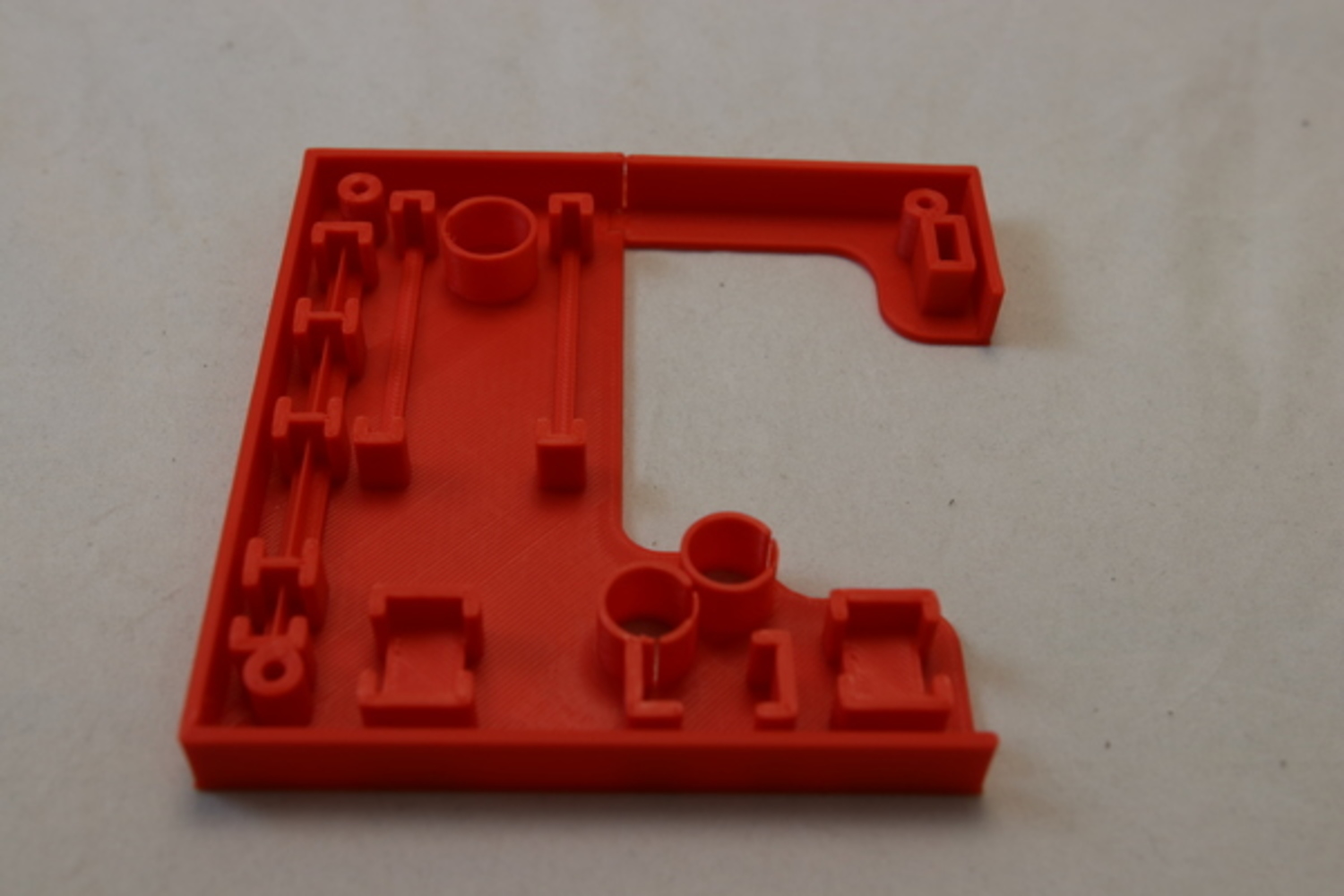
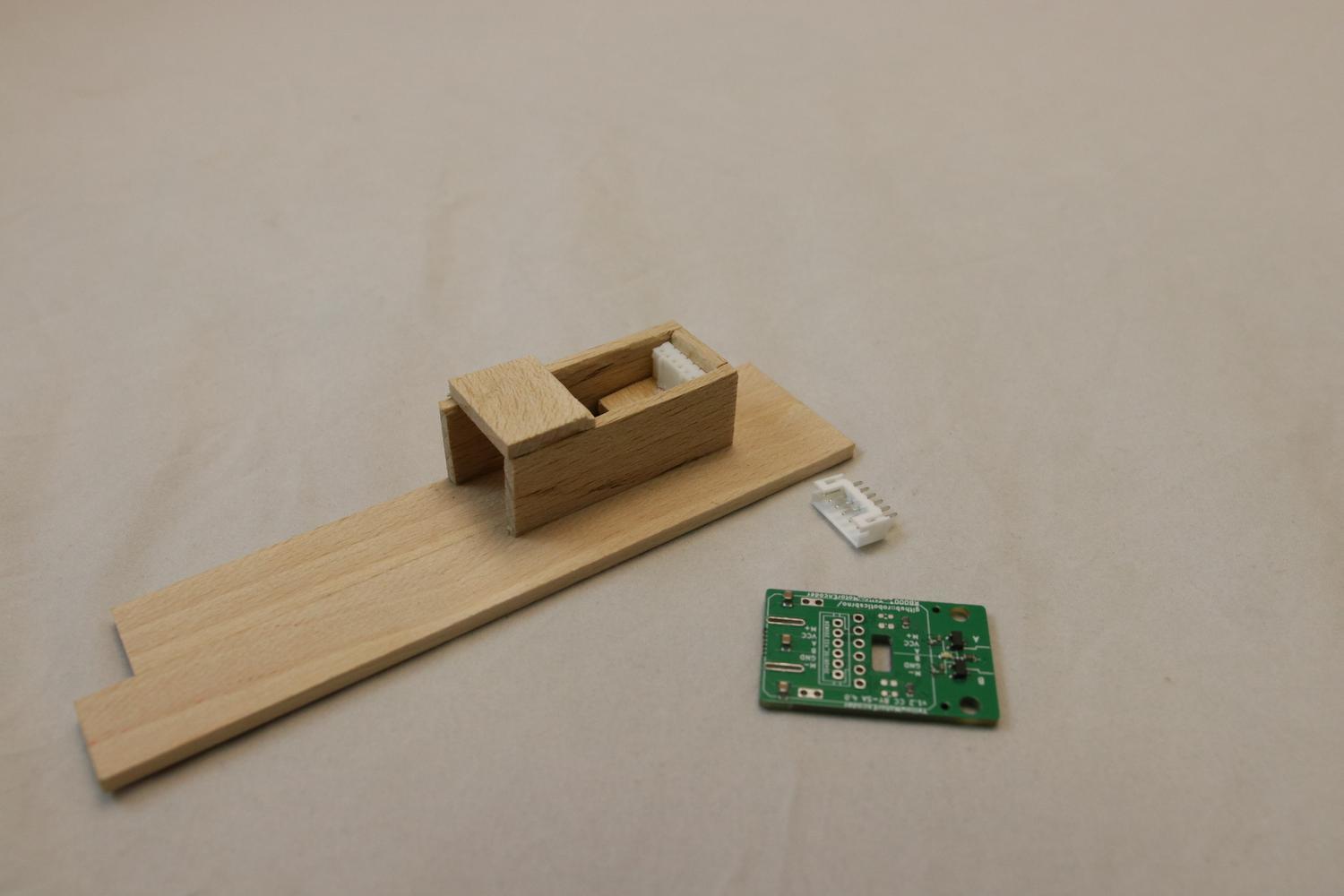
5
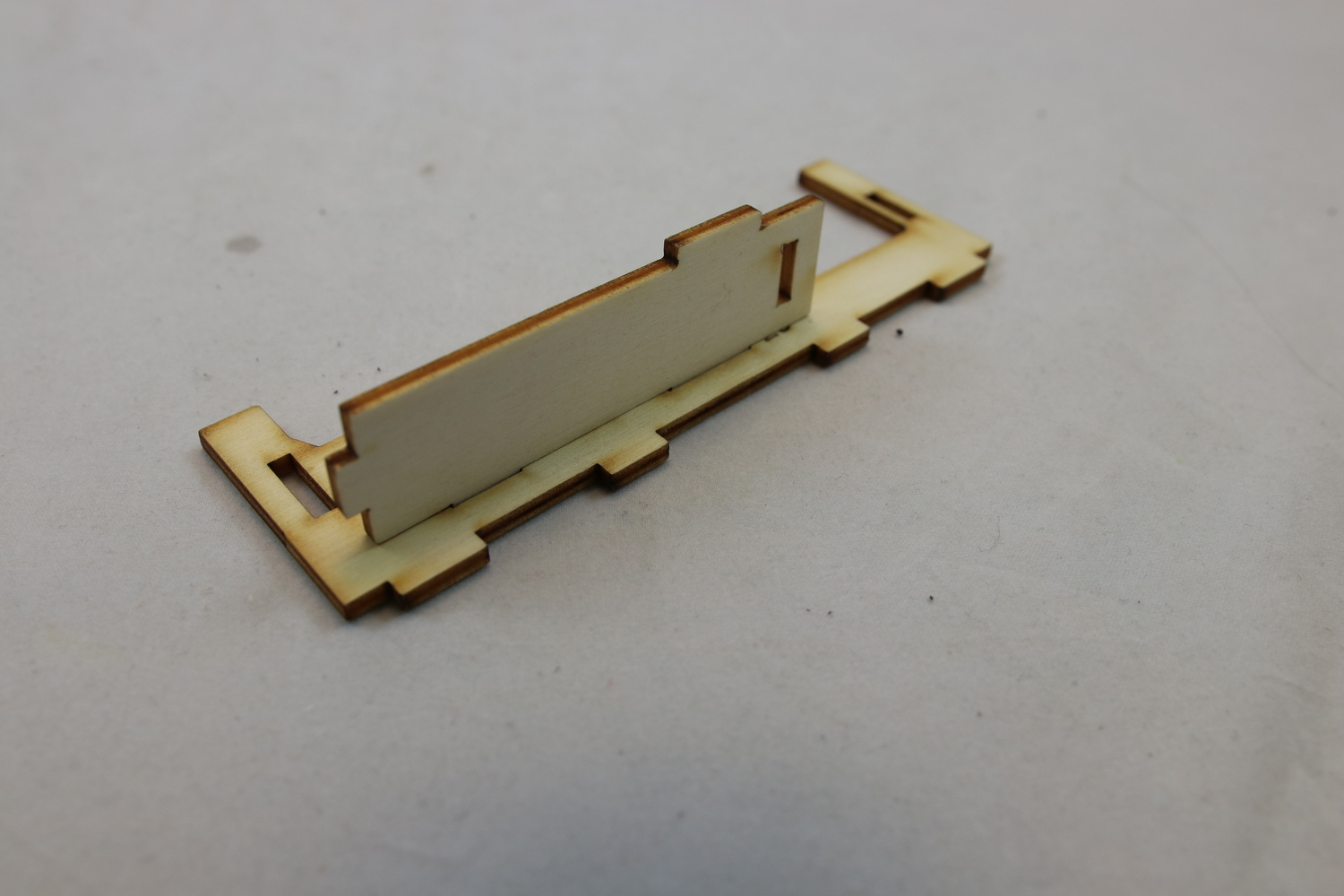
Nachystejte si osazovací přípravek.

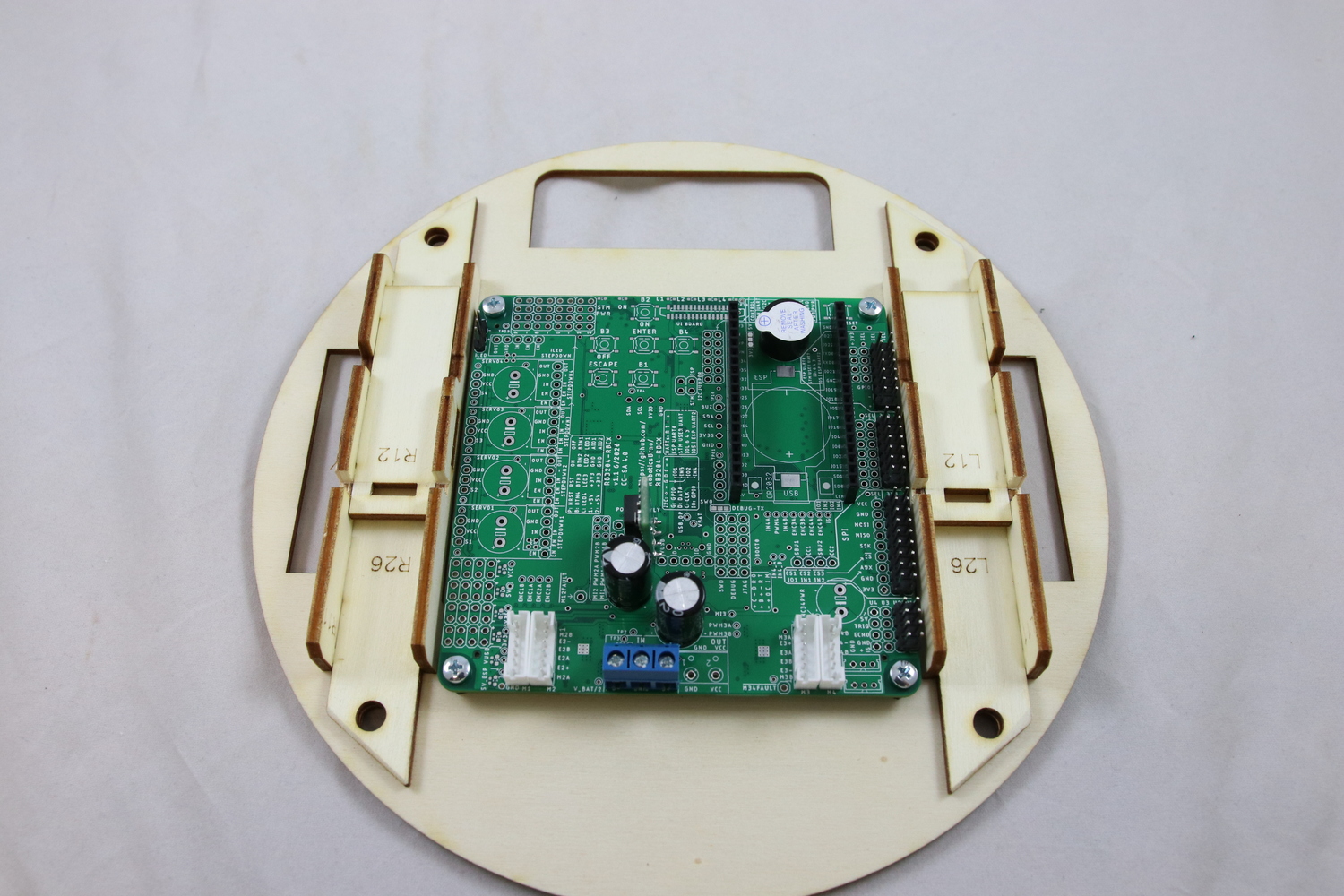
6
Osazovací přípravek nasaďte na desku se součástkami. Pokud vám nejde nasadit, nejspíš máte nějakou součástku na špatném místě.
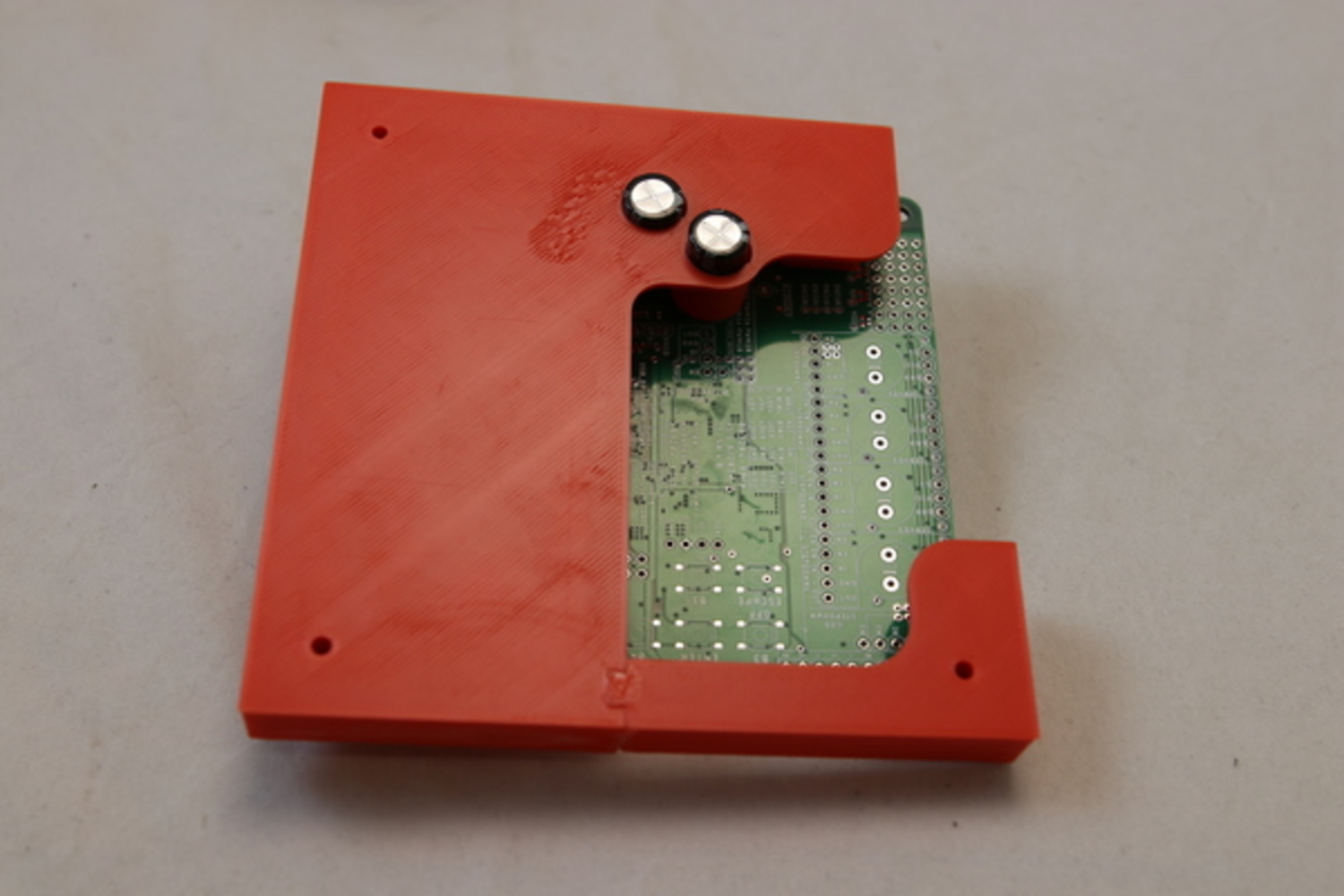
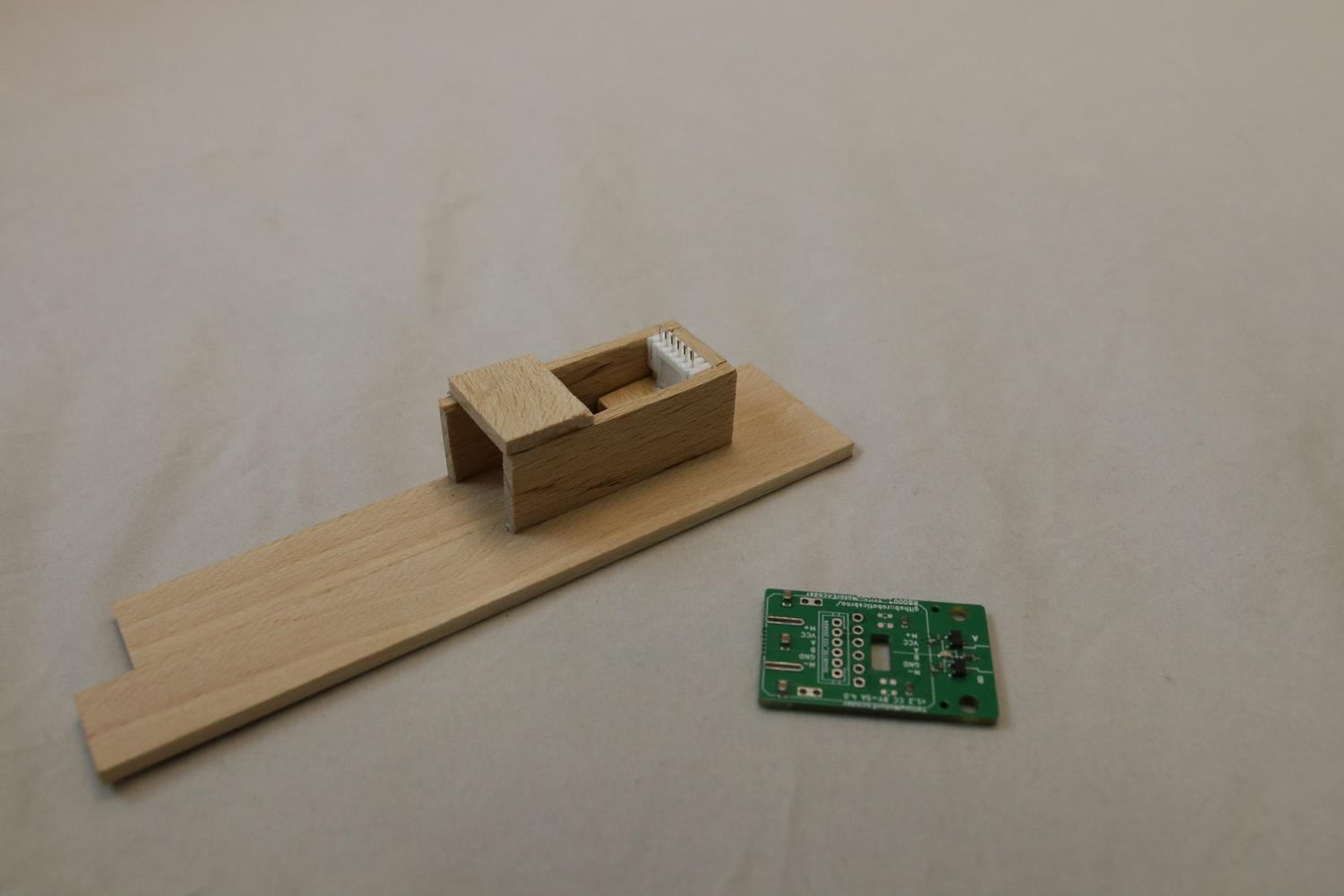
7
Takto vypadá osazovací přípravek správně nasazený na desce se součástkami.
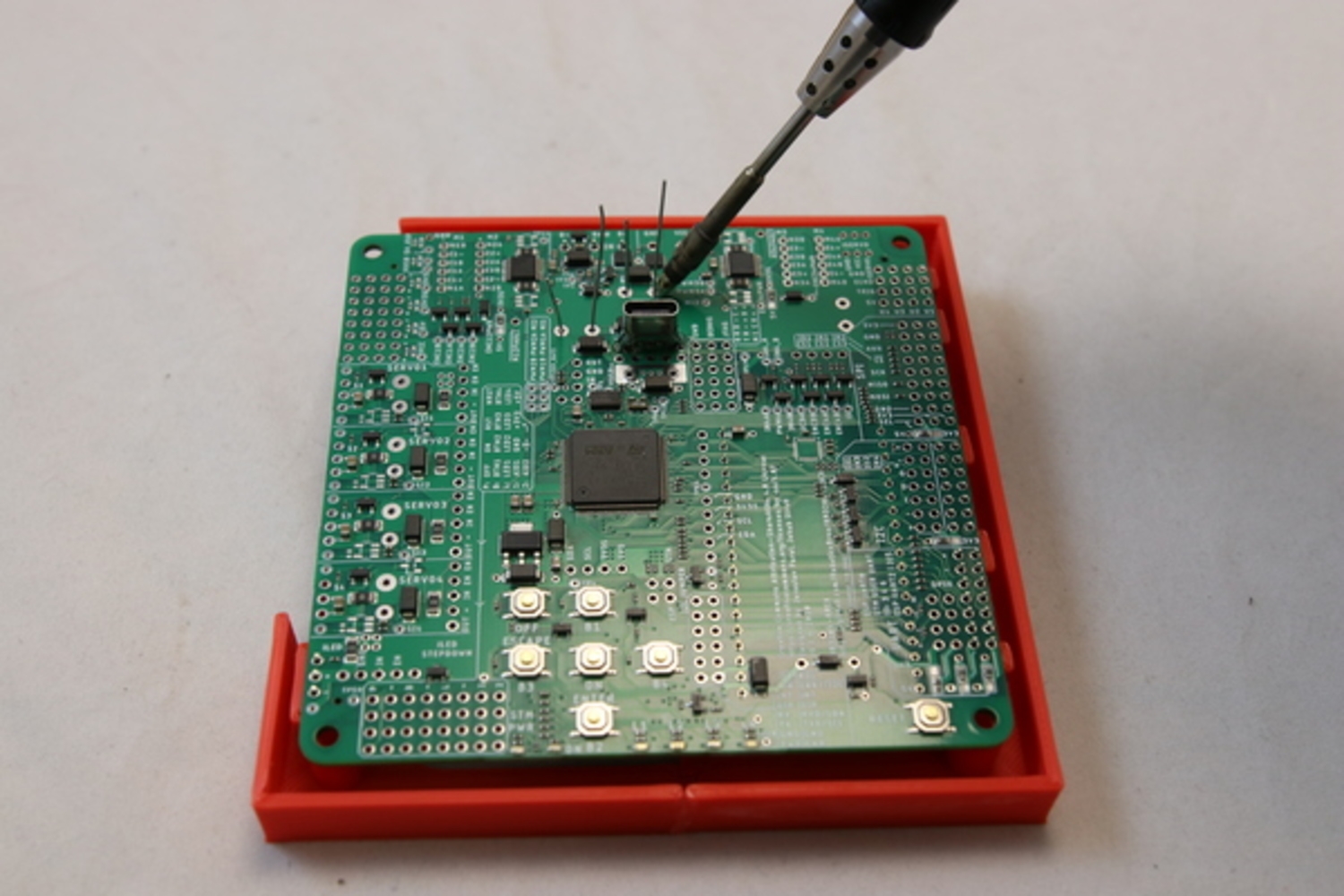
8
Nakonec připájejte všechny součástky k desce.
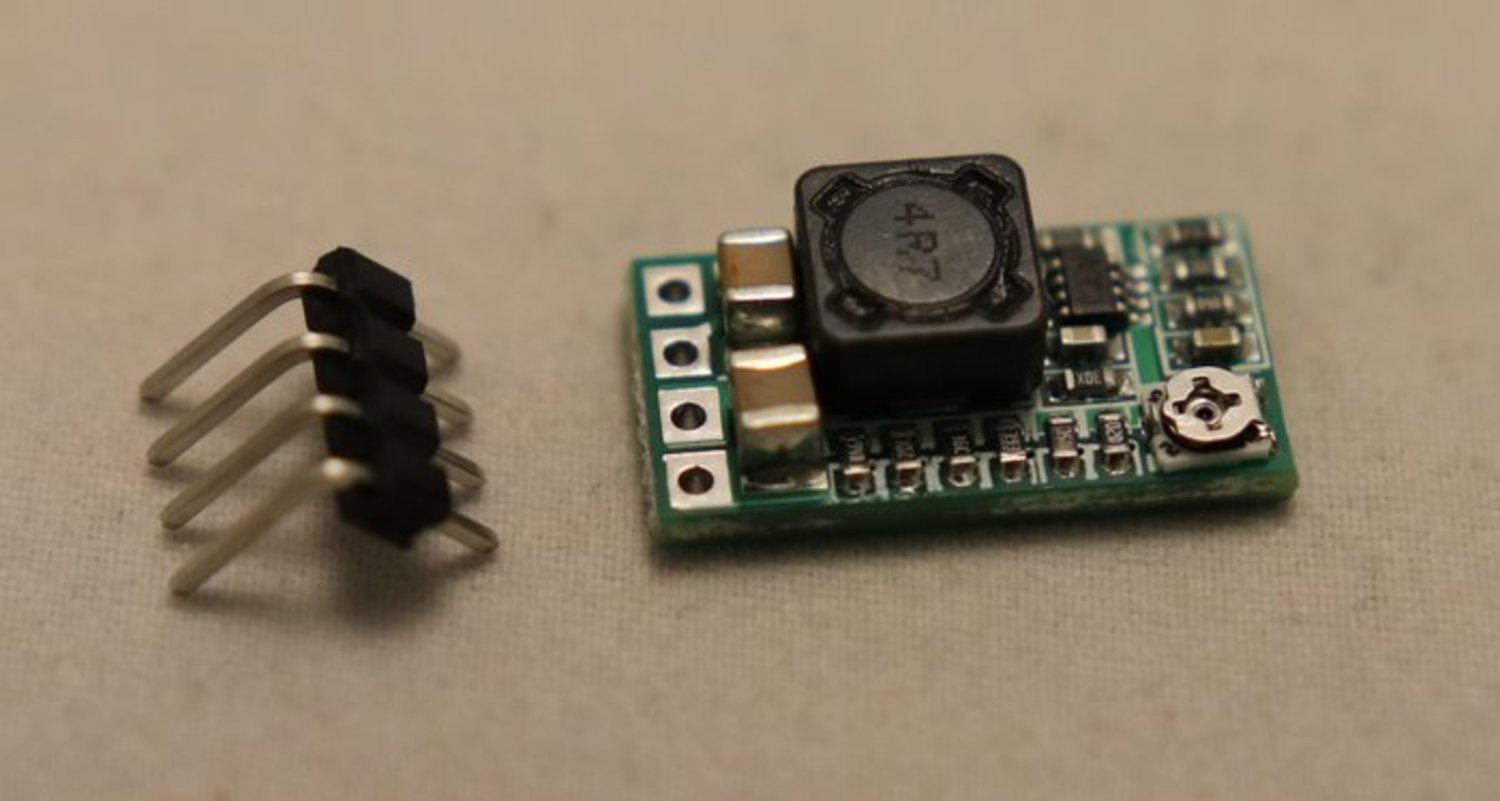
9
Nachystejte si spínaný zdroj a konektor v podobě zahnutých pinheadů.
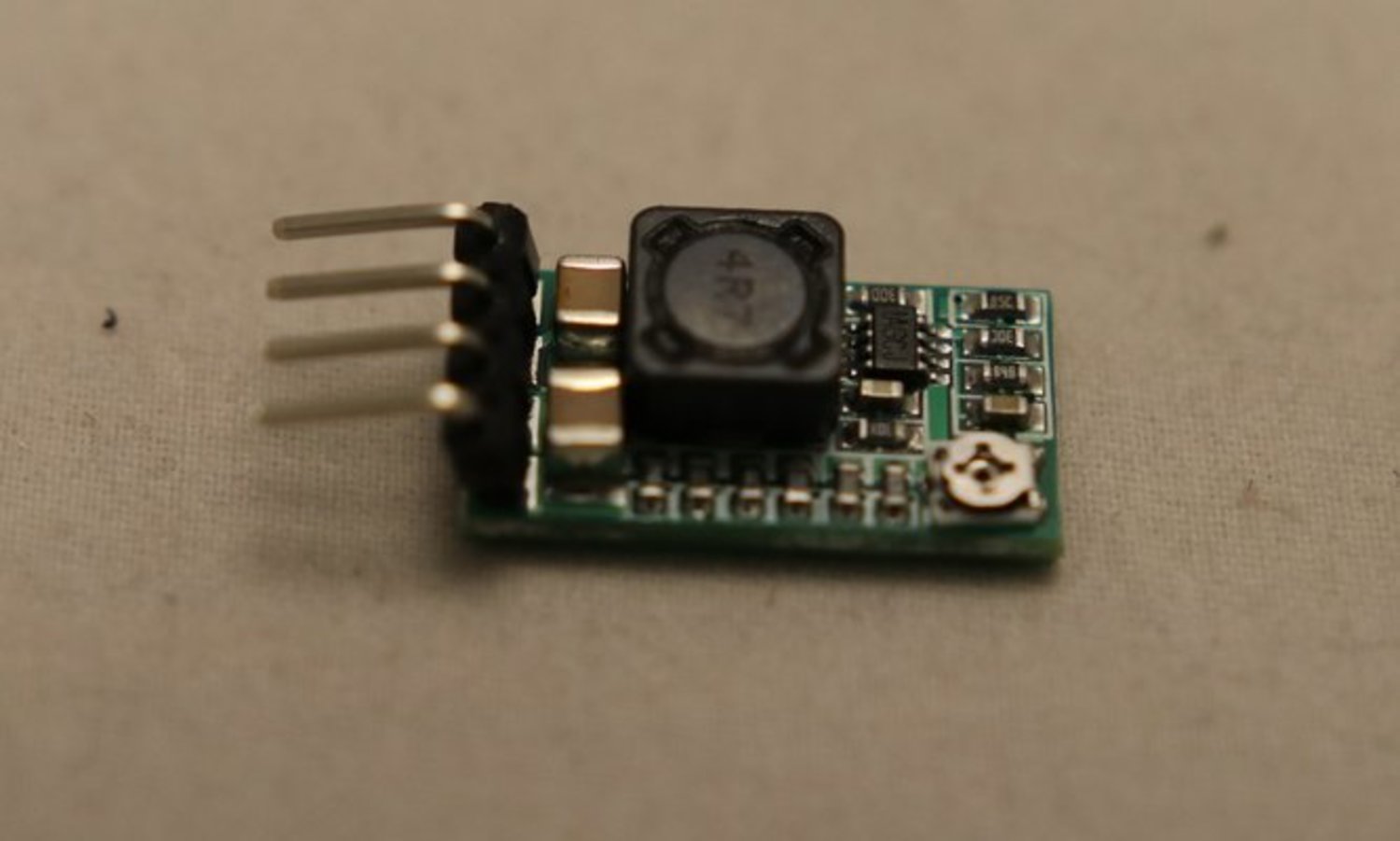
10
Nasaďte konektor přesně podle obrázku. Pokud ho nasadíte opačně, součástka se vám potom nevejde na desku.
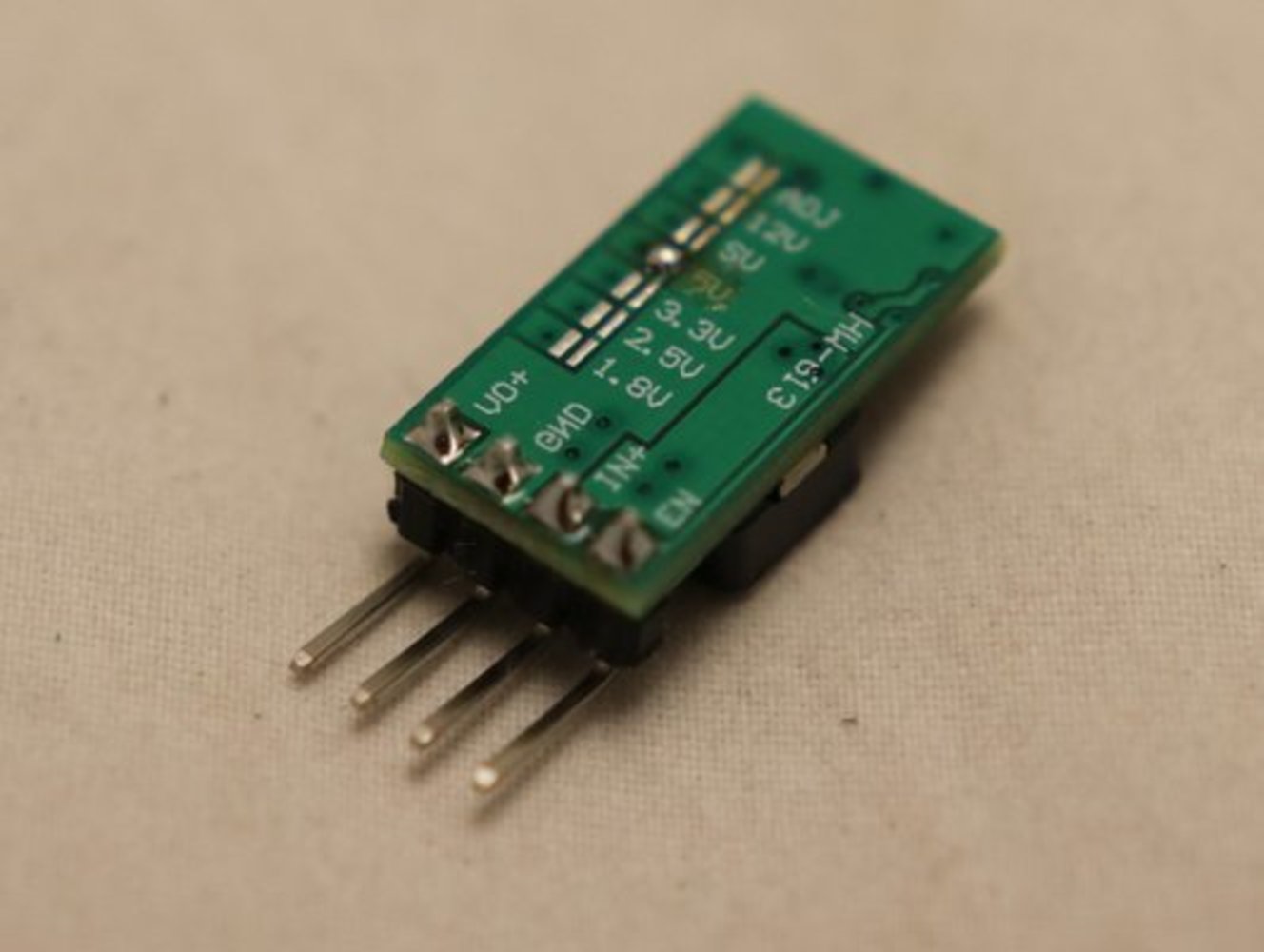
11
Připájejte konektor podle obrázku.

12
Spínaný zdroj vložte do desky plošných spojů přesně podle obrázku.

13
Připájejte spínaný zdroj k desce z druhé strany.
14
Přečnívající konce drátků ucvakněte pomocí štípaček.
15
Spínaný zdroj máme připojený k desce.
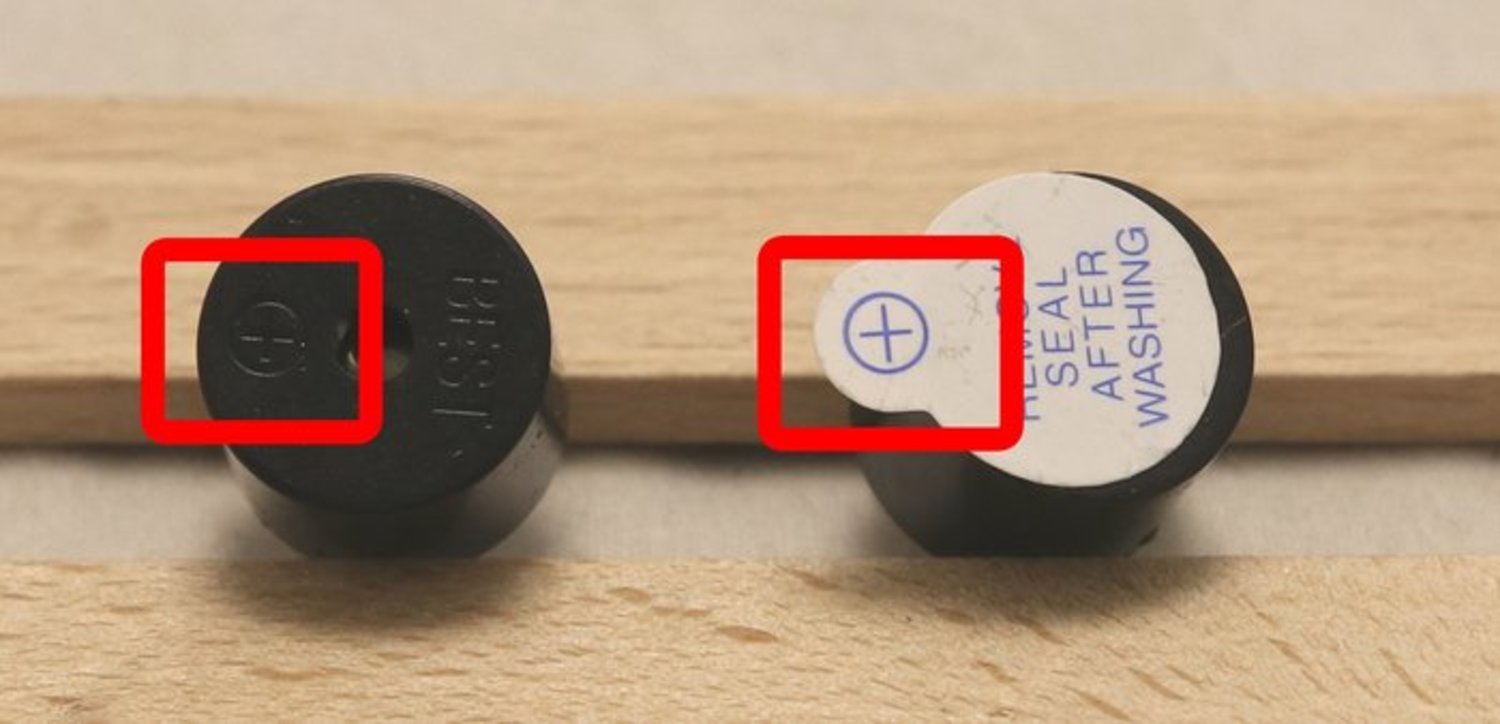
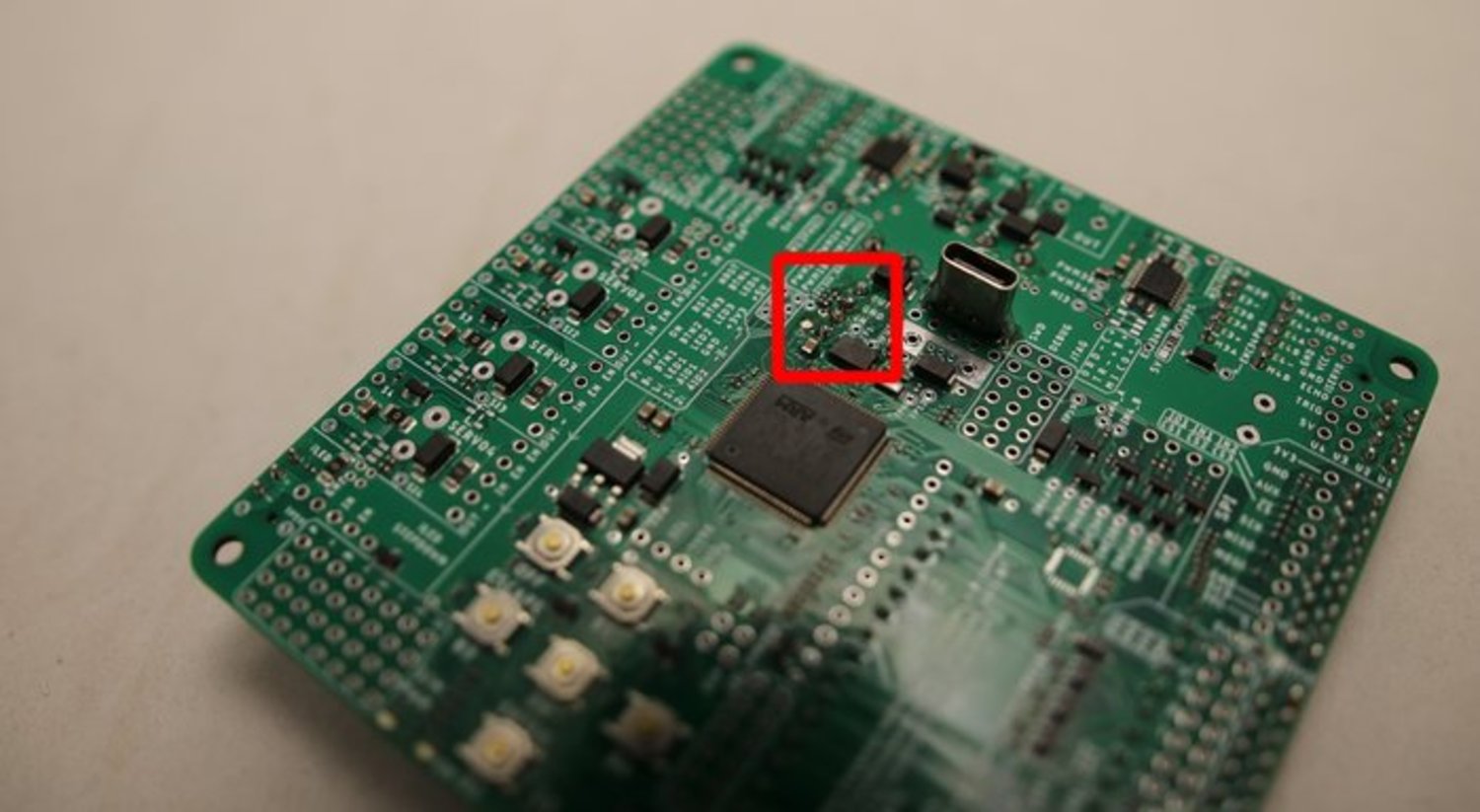
16
Vezměte si piezo sirénku a podívejte se, kde je označené plus (+).
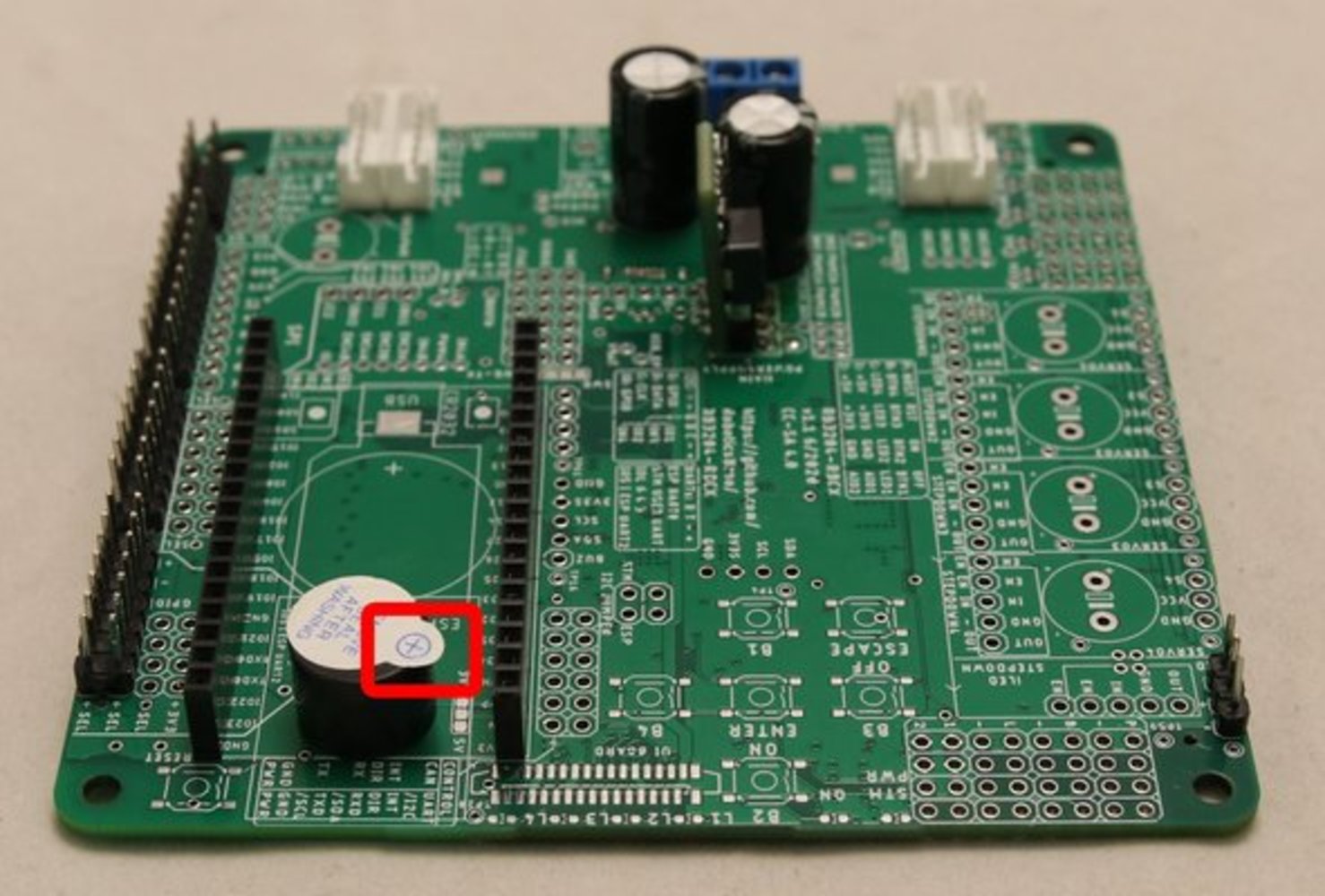
17
Vložte piezo sirénku do DPS a dejte pozor na polaritu (na správné otočení). Sirénku připájejte.

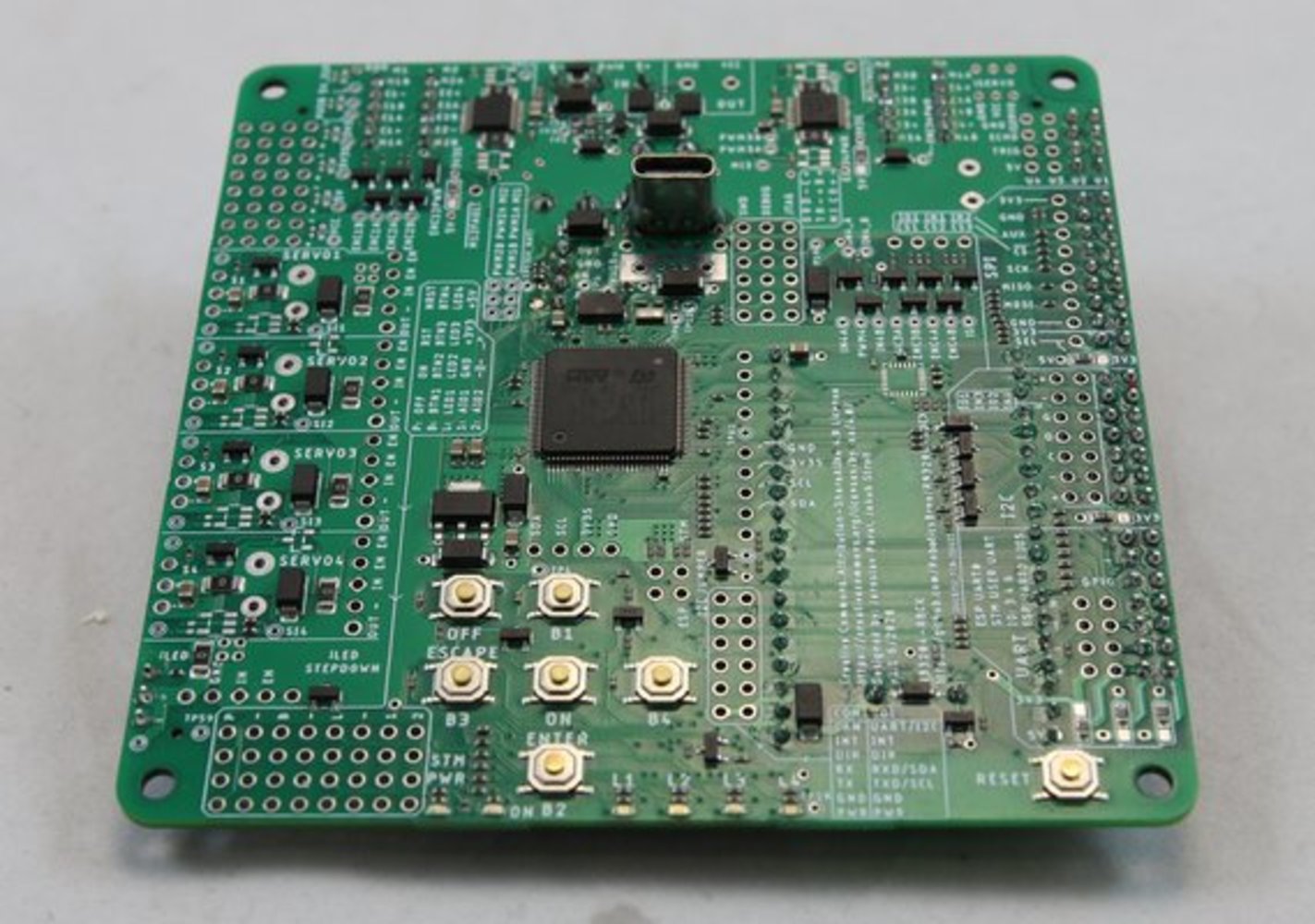
18
Máme hotovo! Zkontrolujte si, že horní strana desky vypadá přesně takto.
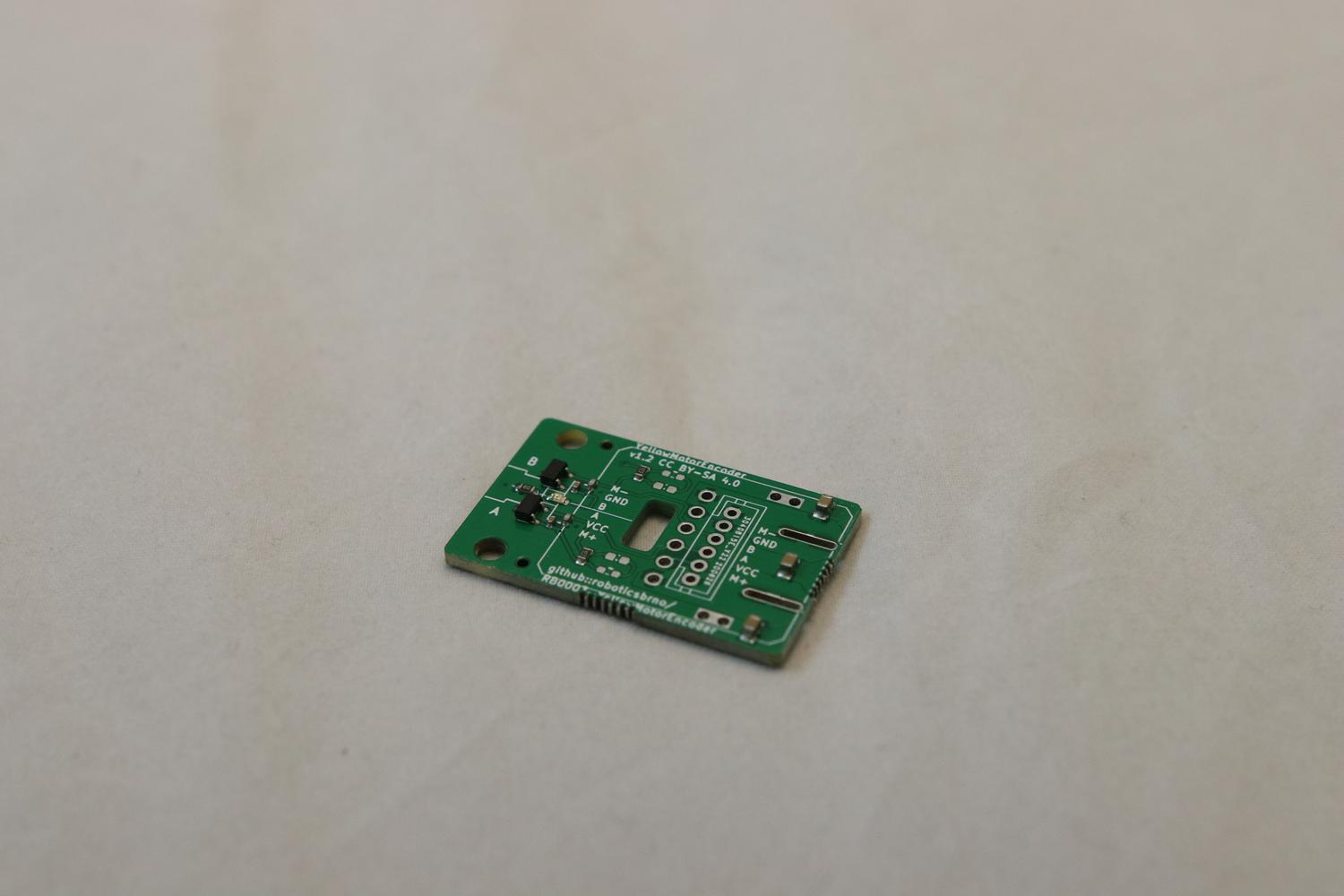
19
Máme hotovo! Zkontrolujte si, že spodní strana desky vypadá přesně takto.
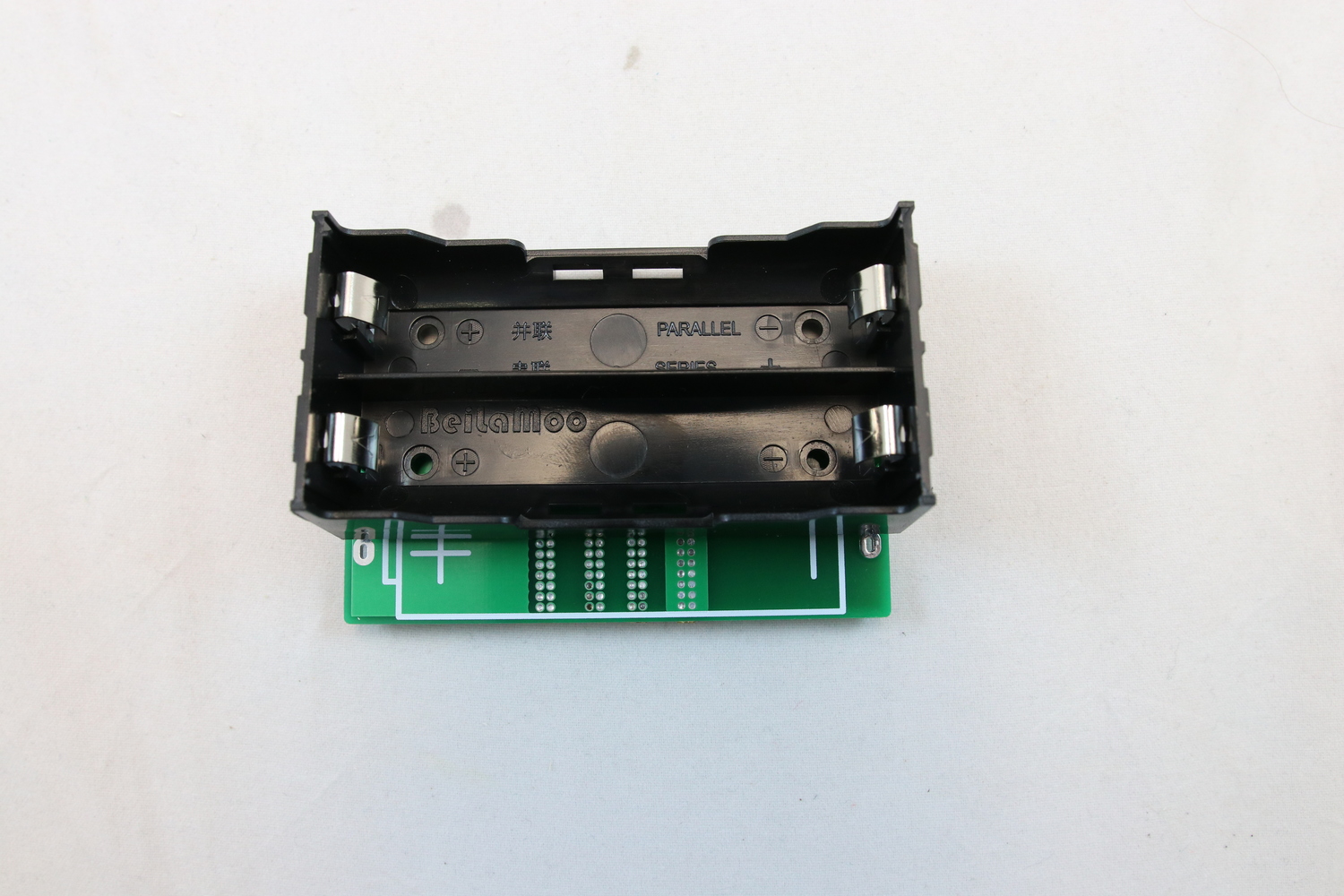
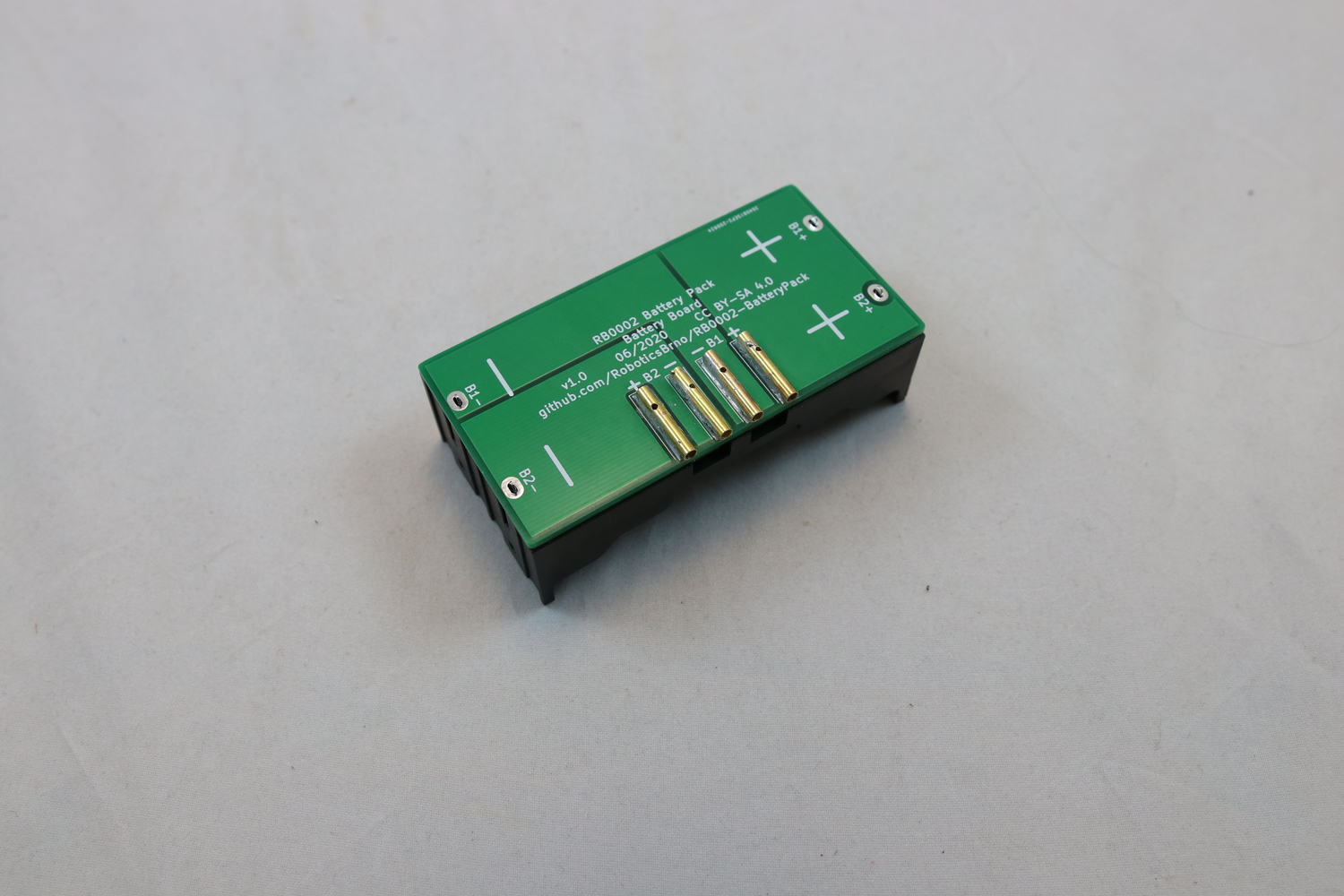
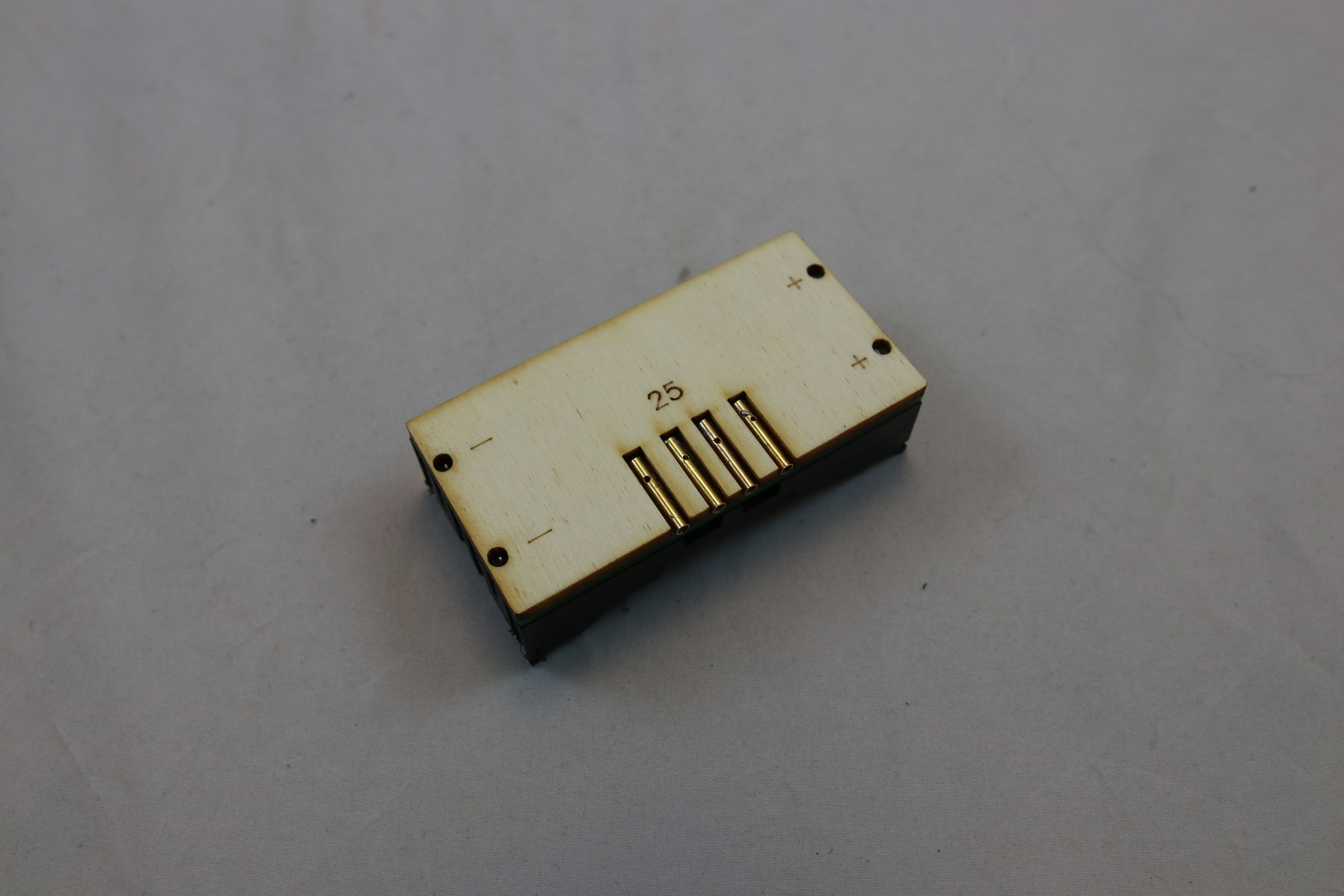
Battery pack

1
2

3
4

5

6
7

8

9
10
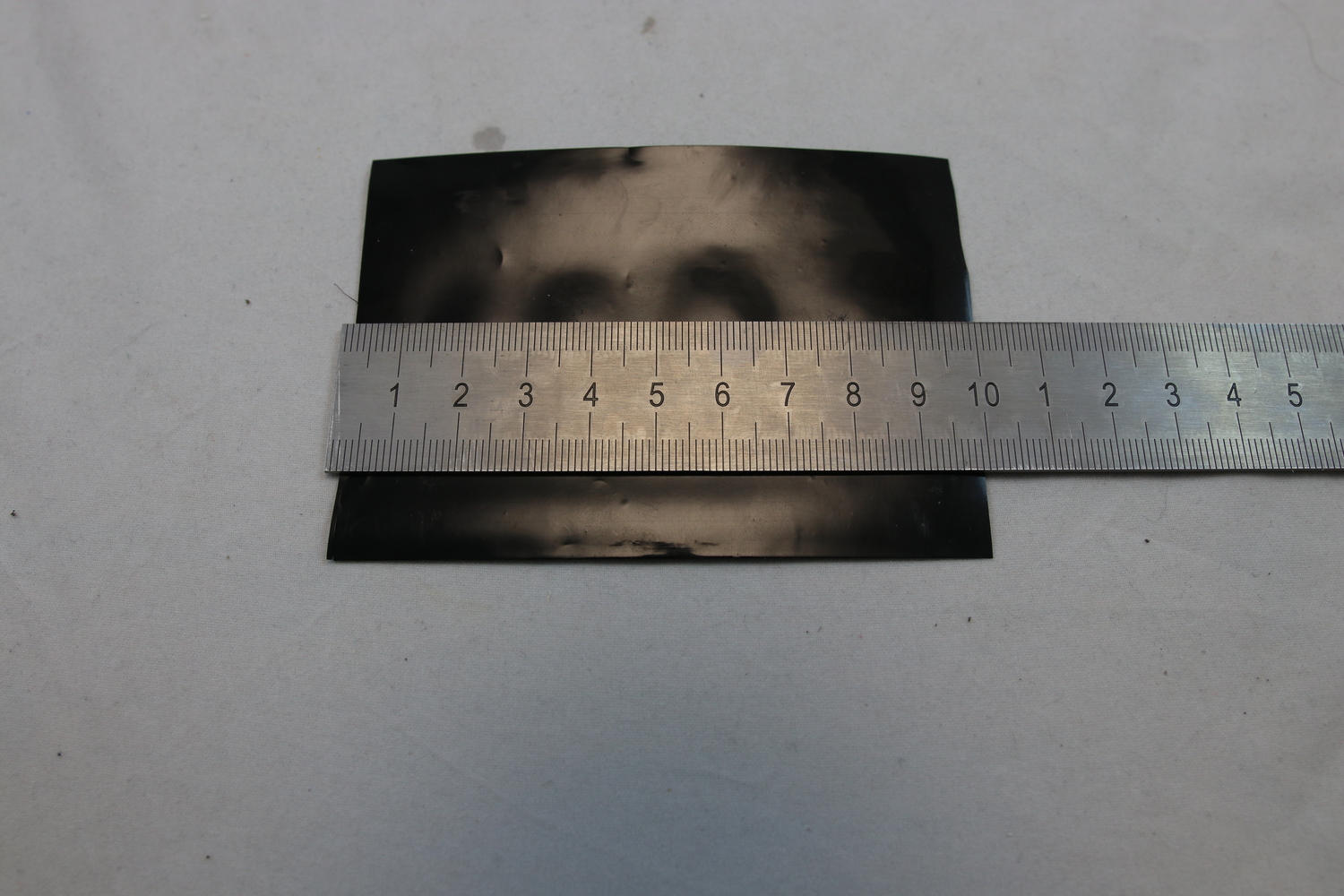
Délka 10 cm

11

12

13

14

15

16
17

18
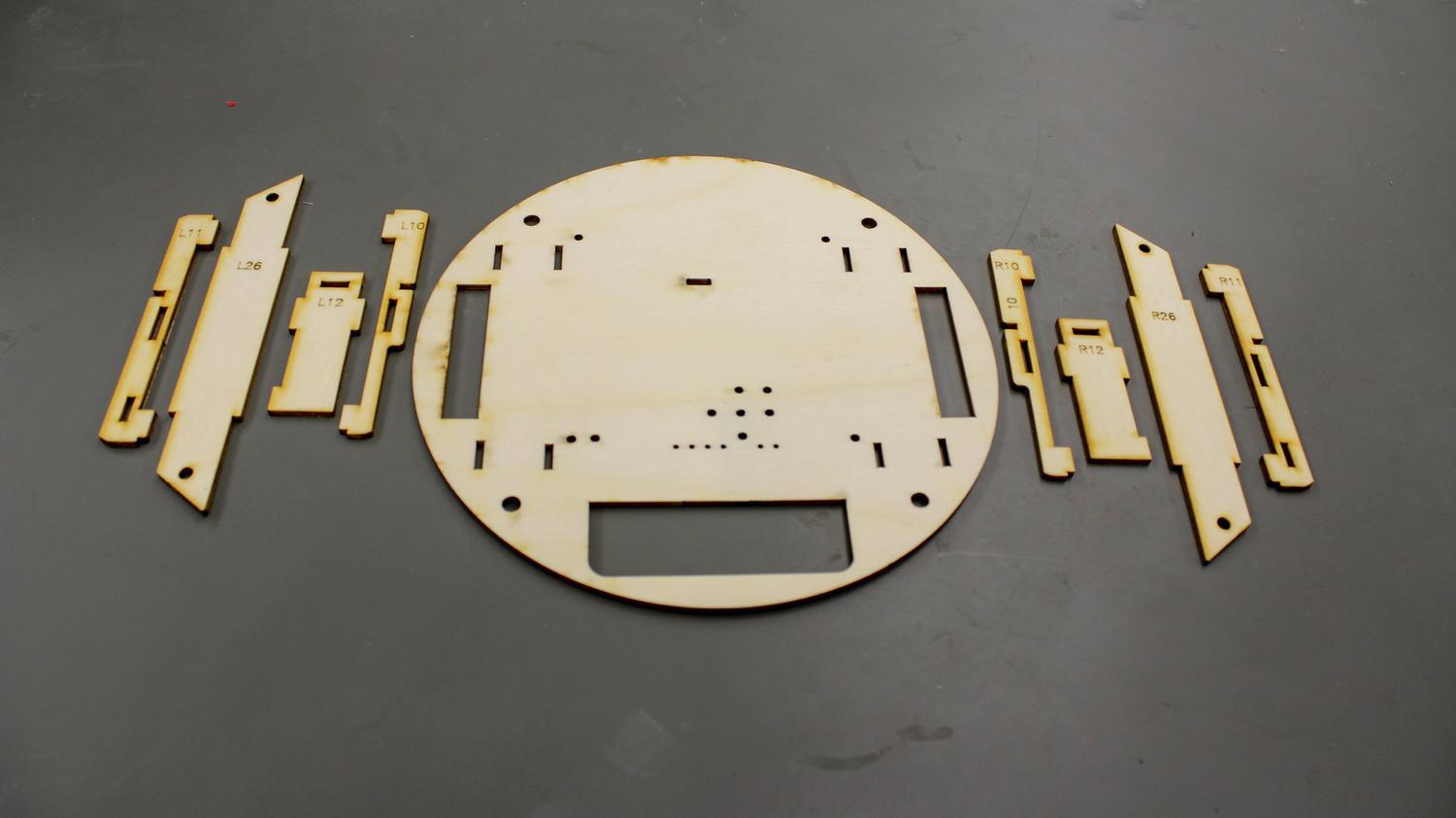
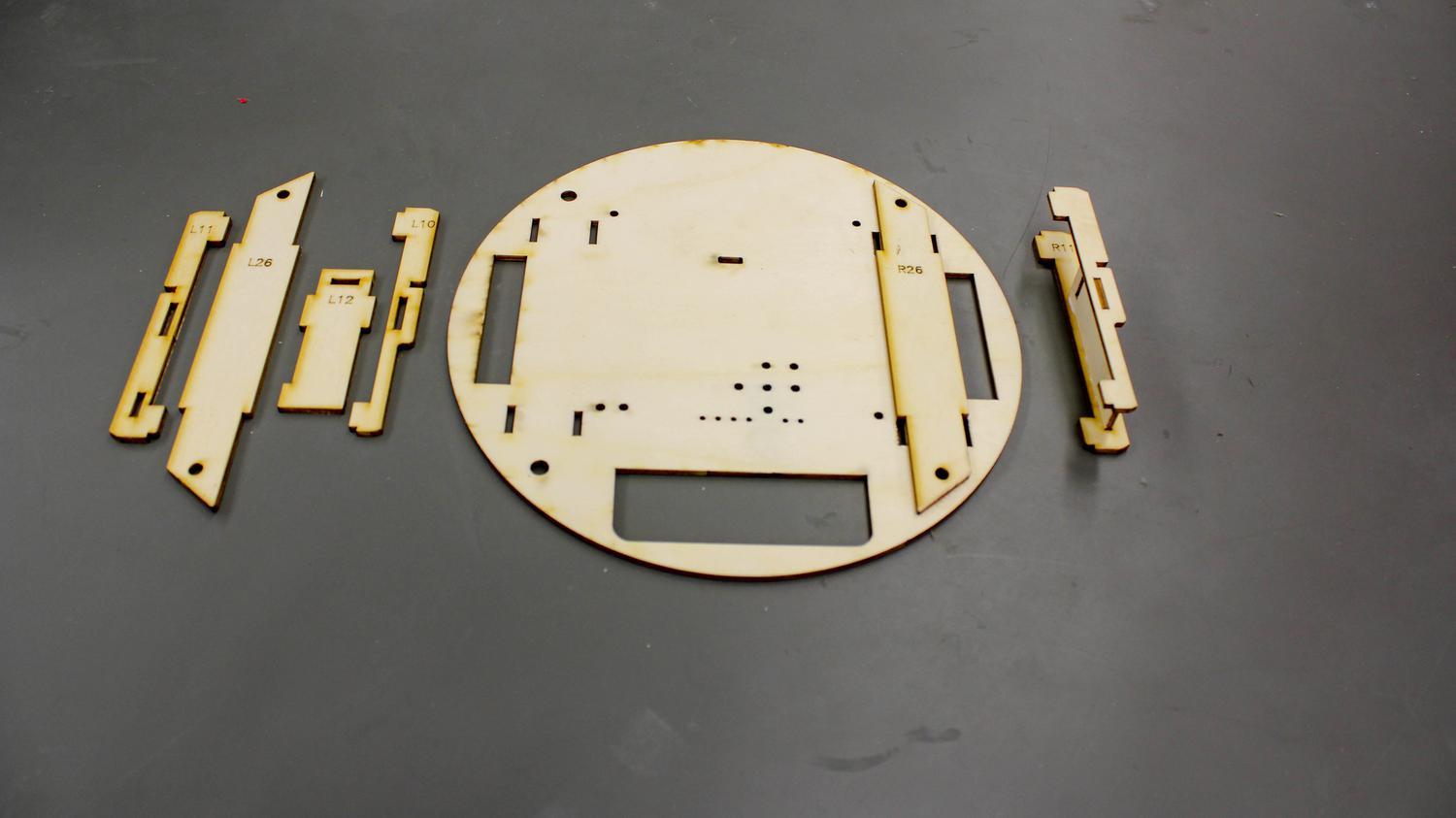
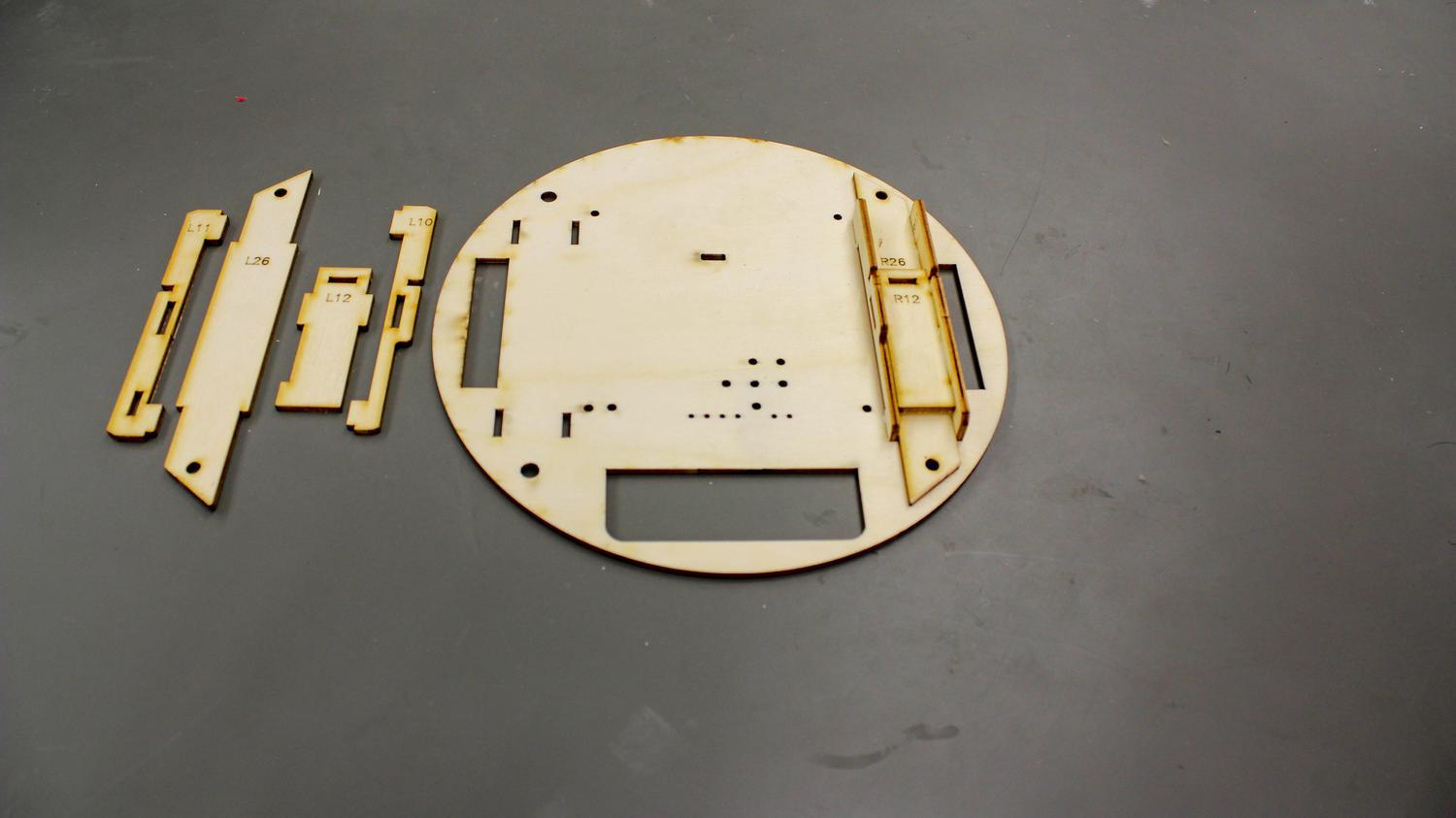
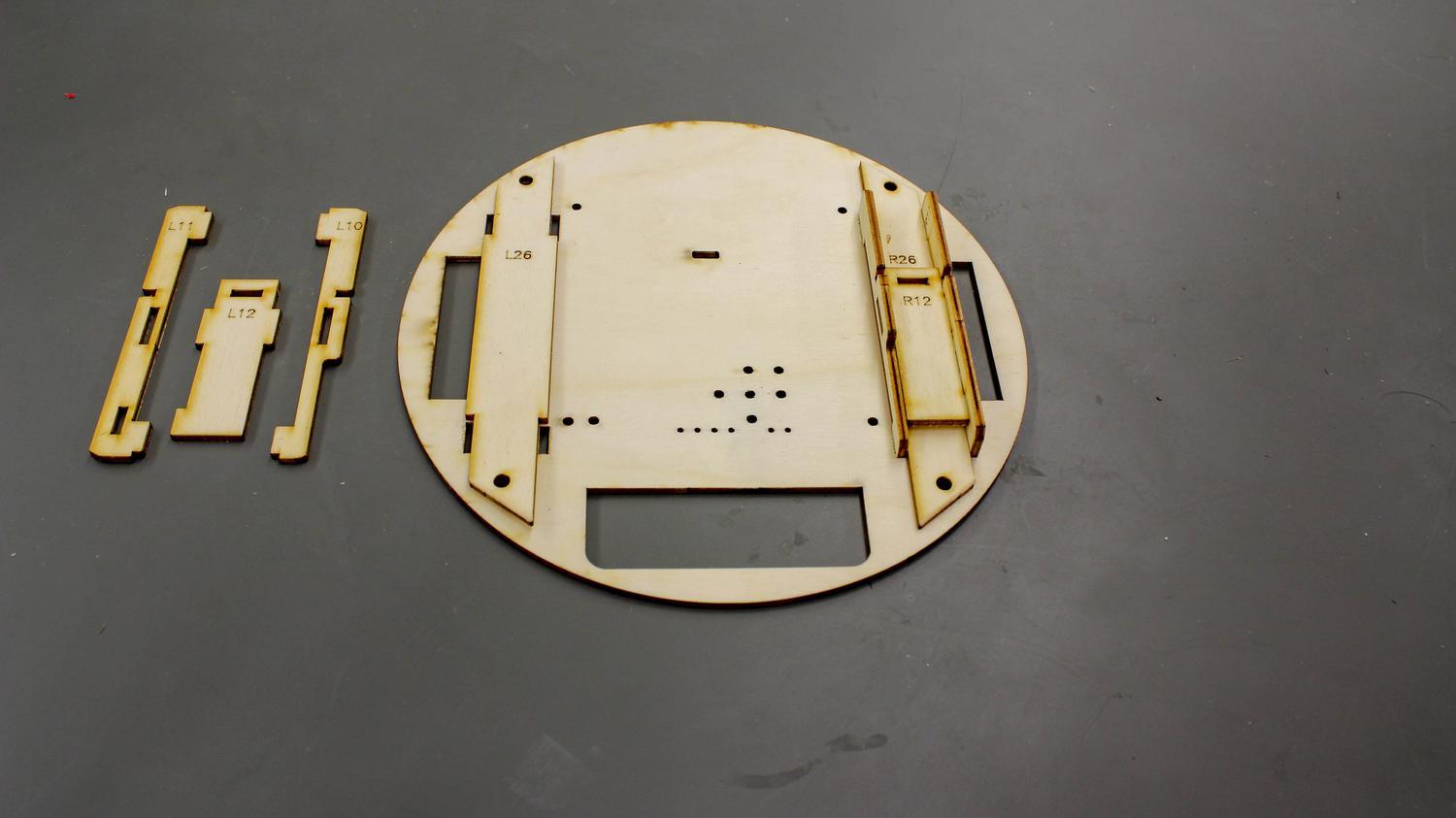
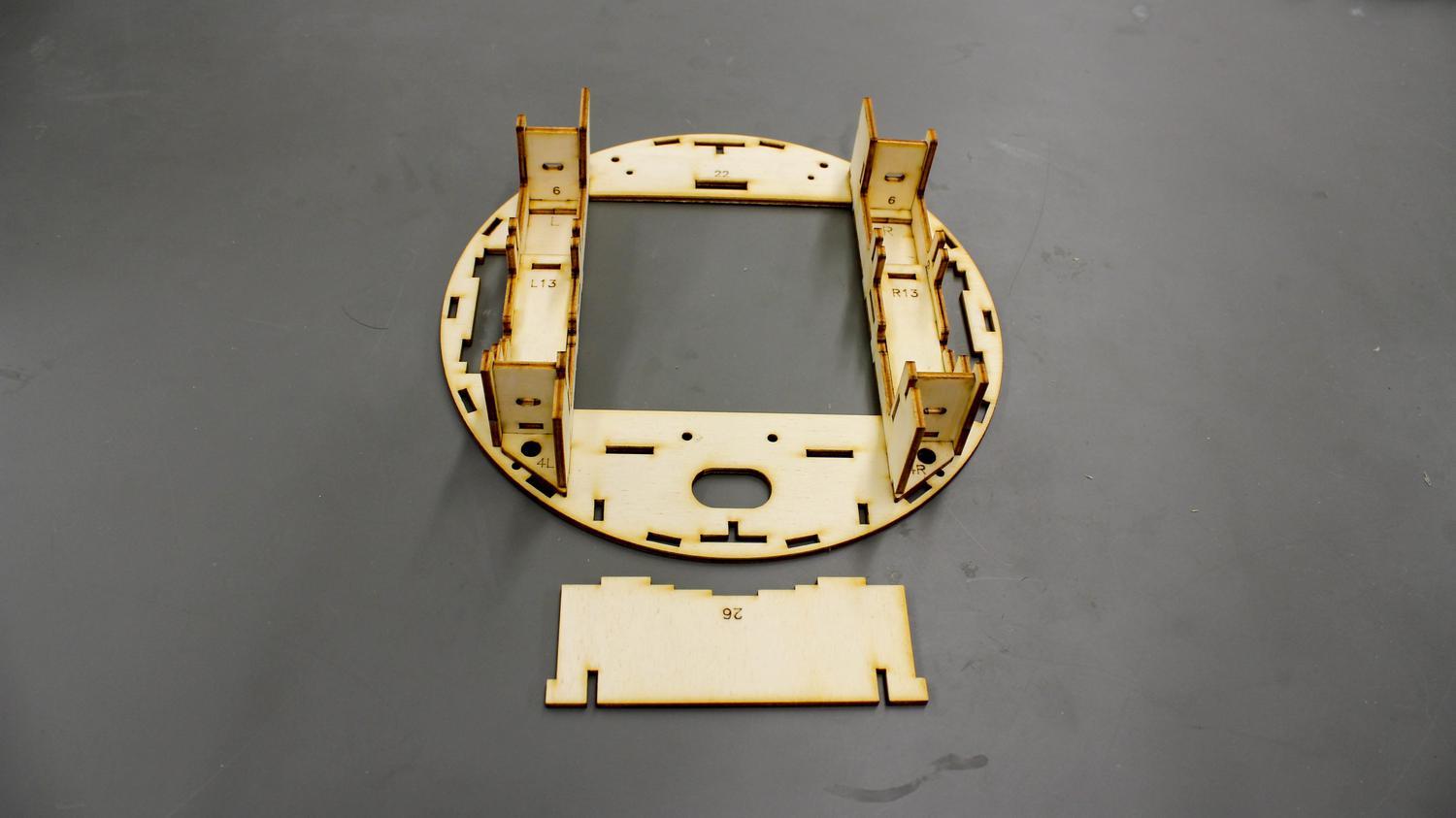
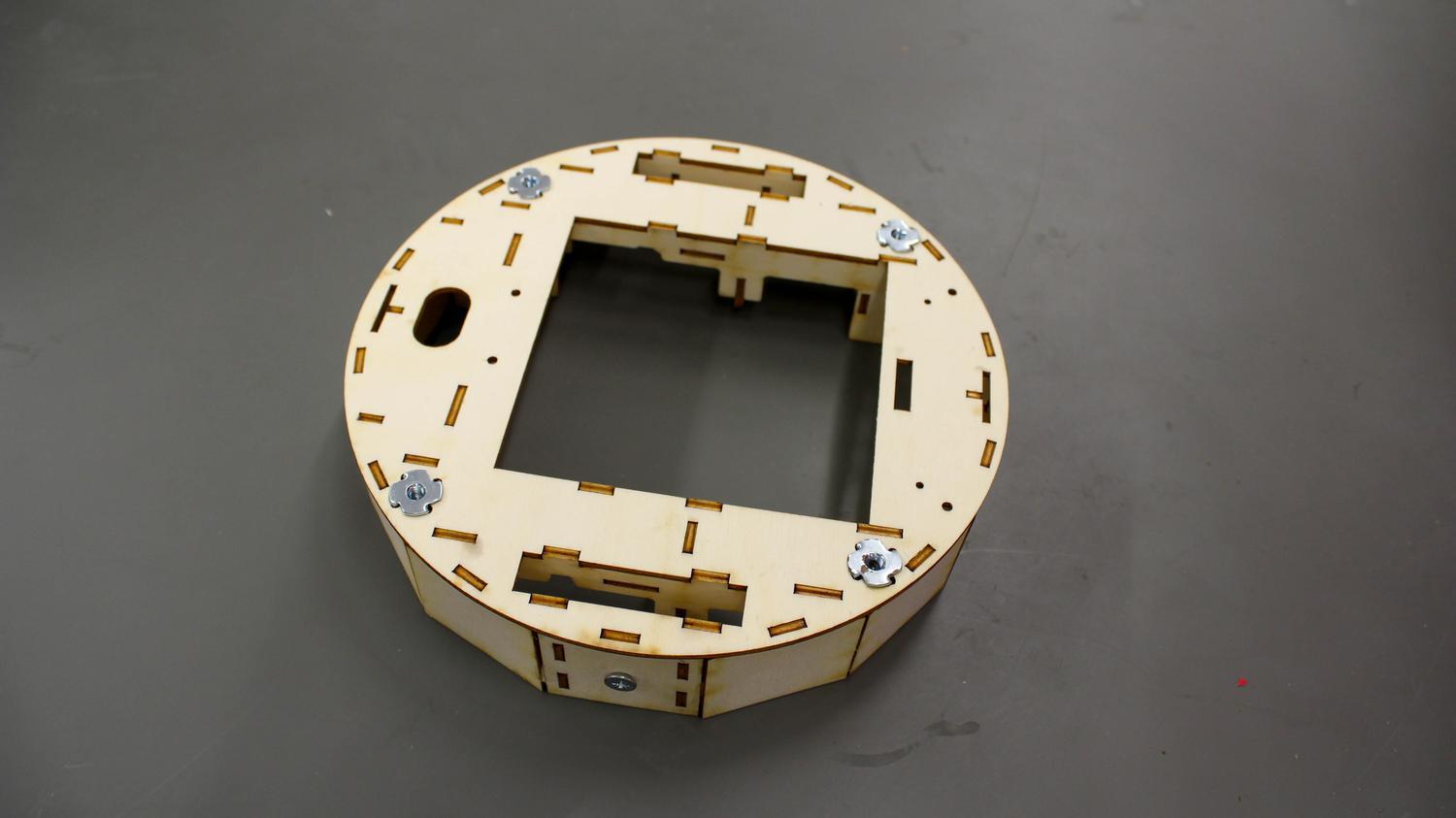
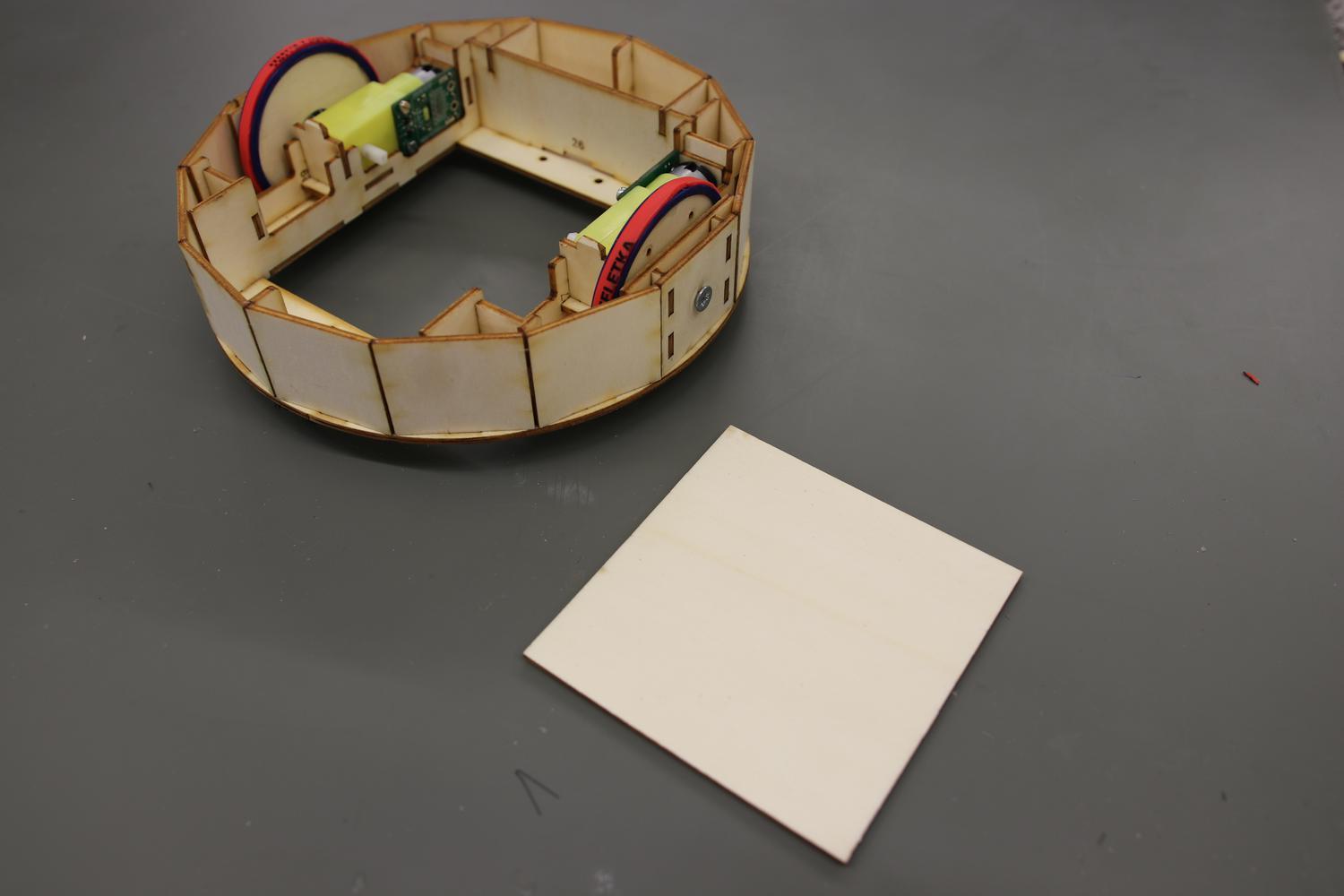
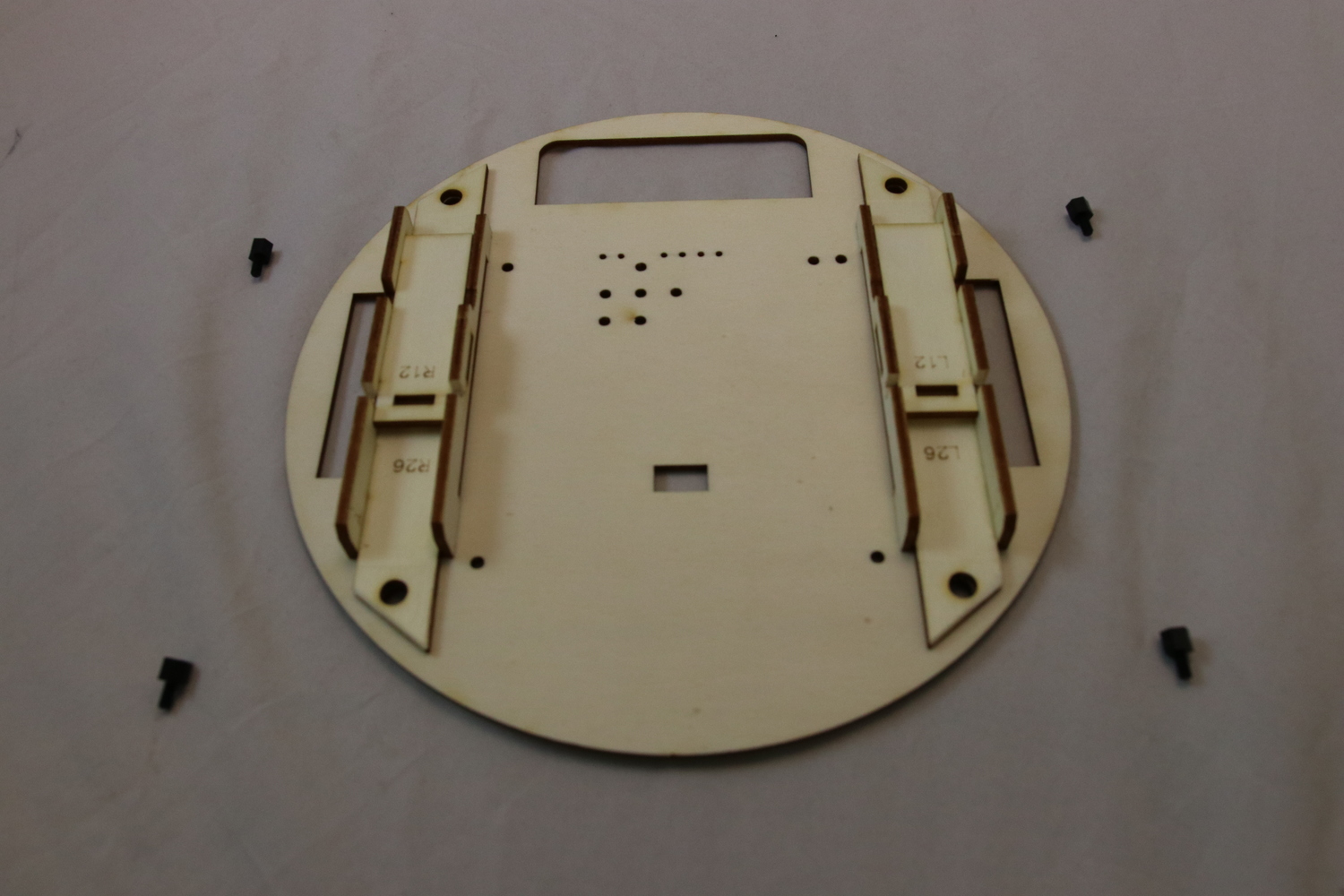
Paluba
Teď si sestavíme palubu robota (horní plochu), na kterou budeme poté připevňovat senzory, nebo různé konstrukce.
1

2
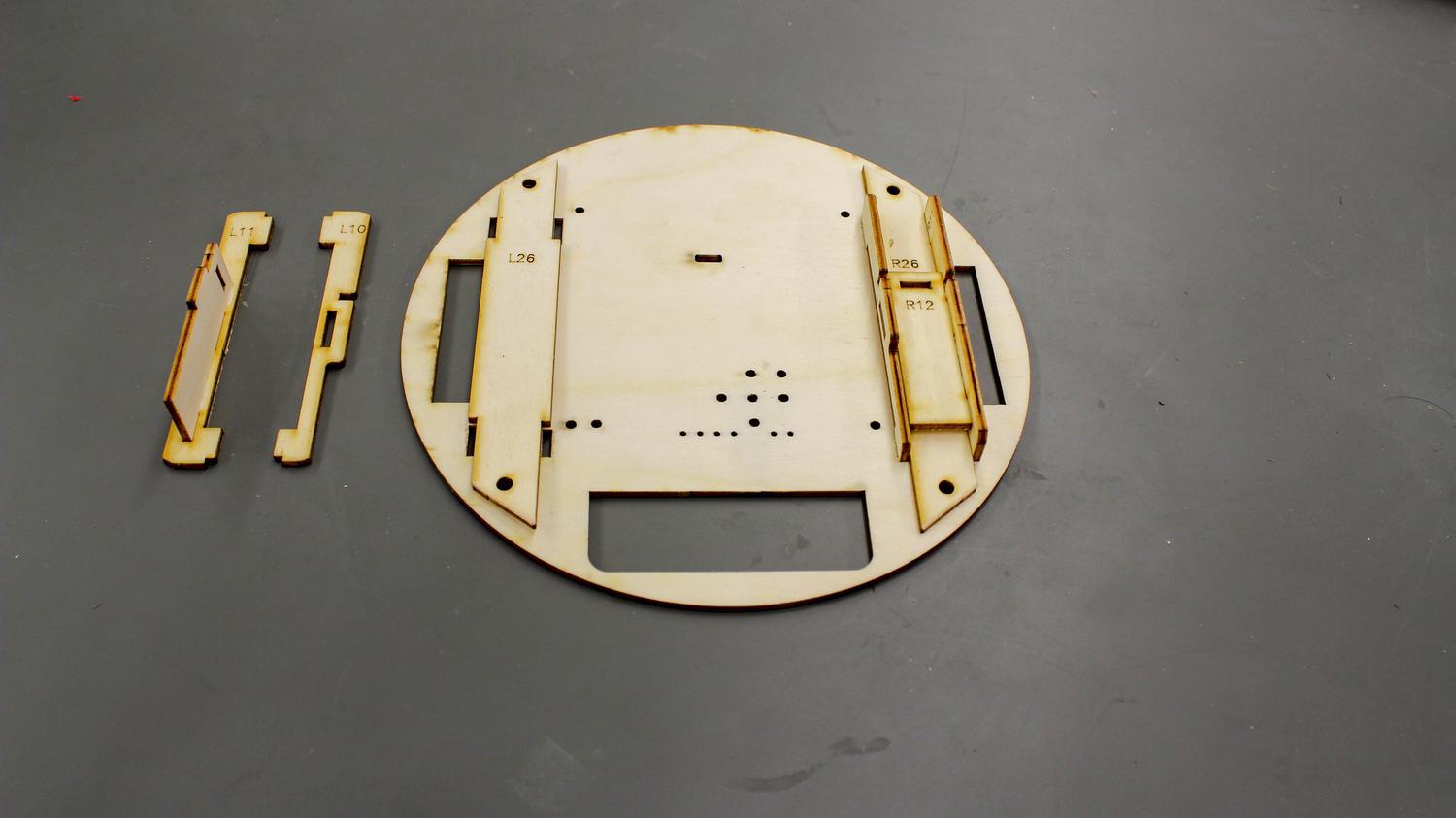
Obruste oba dílky 26 ze strany kde je popisek

3
4

5
6

7

8
9
10
11

12
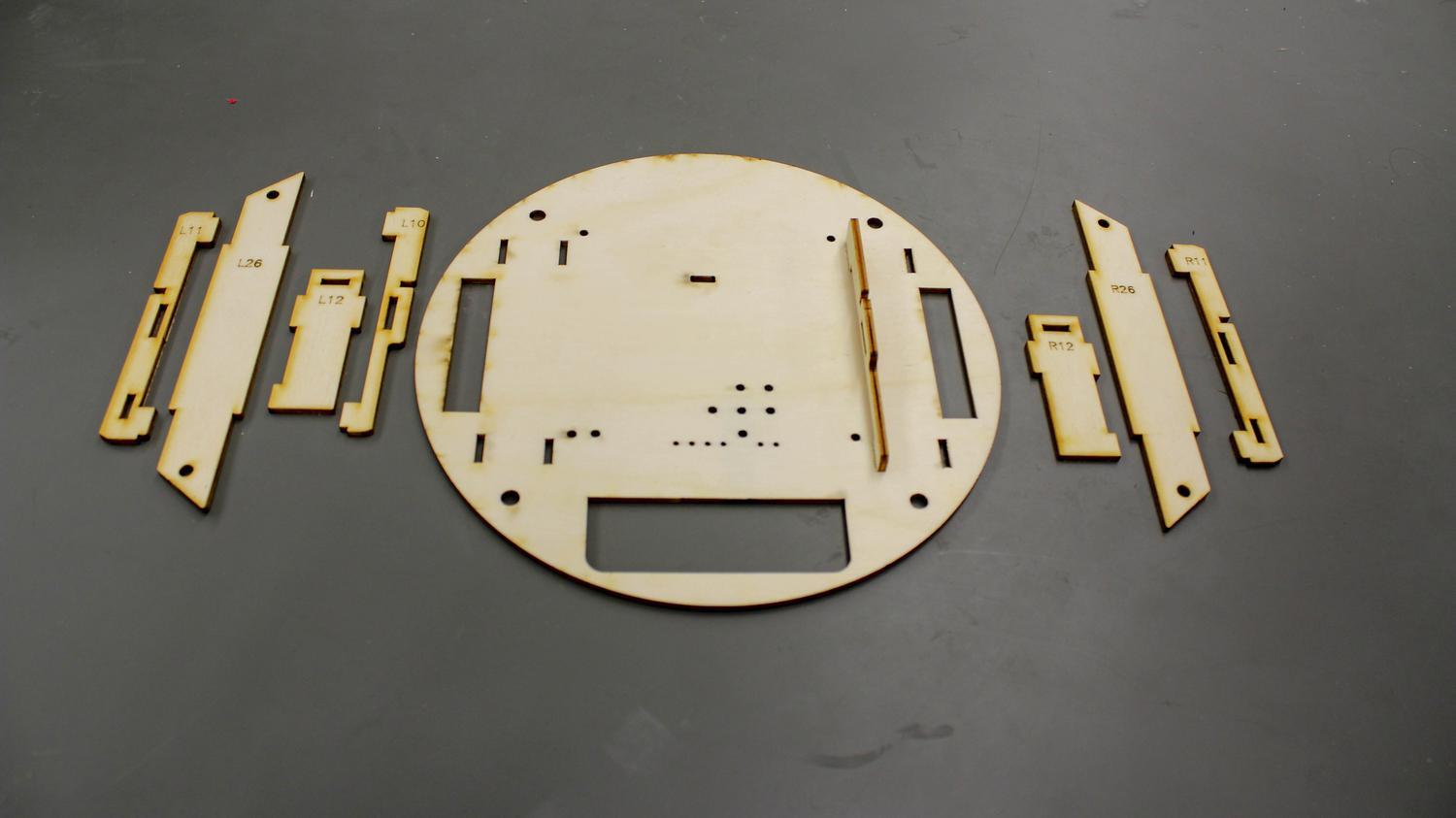
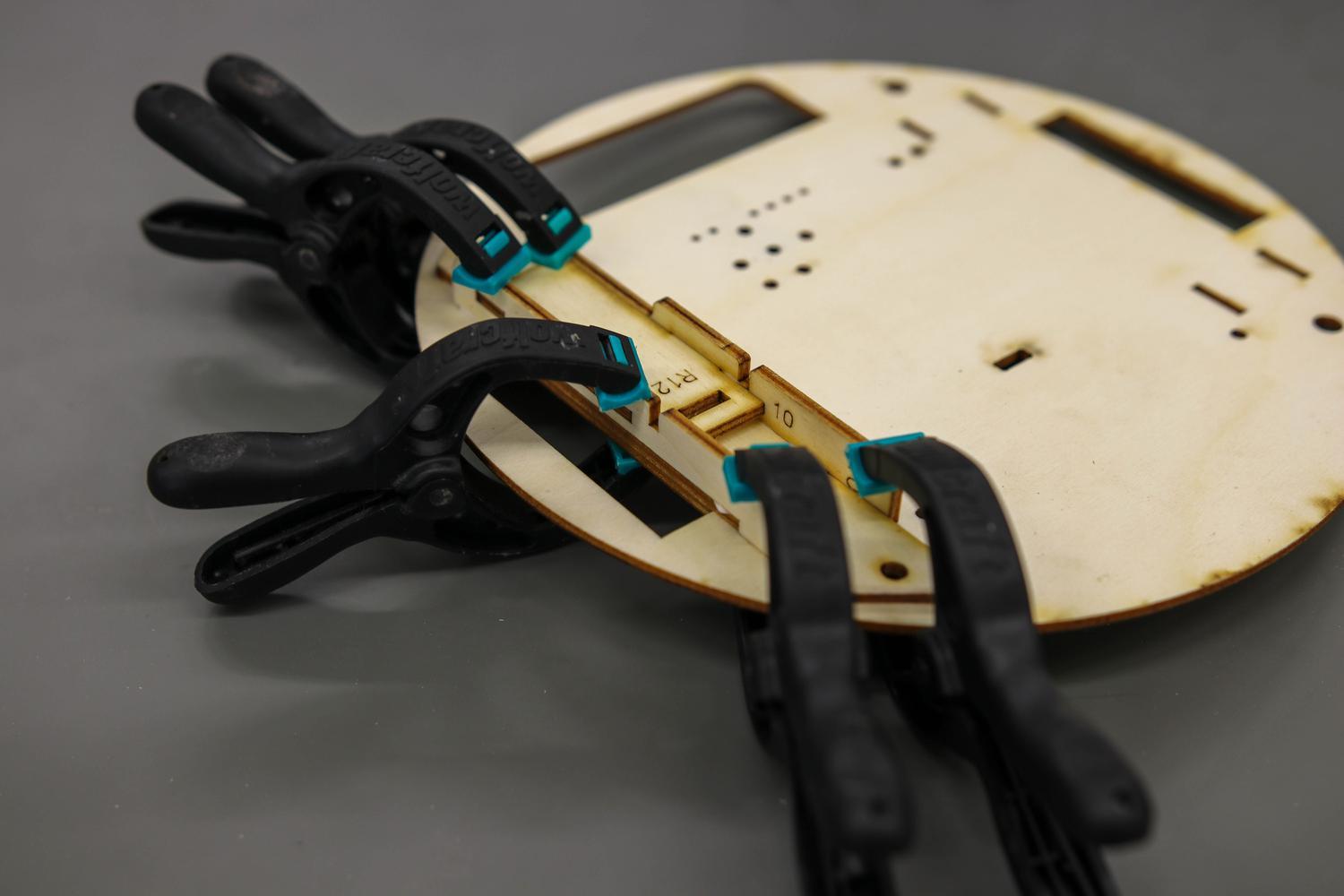
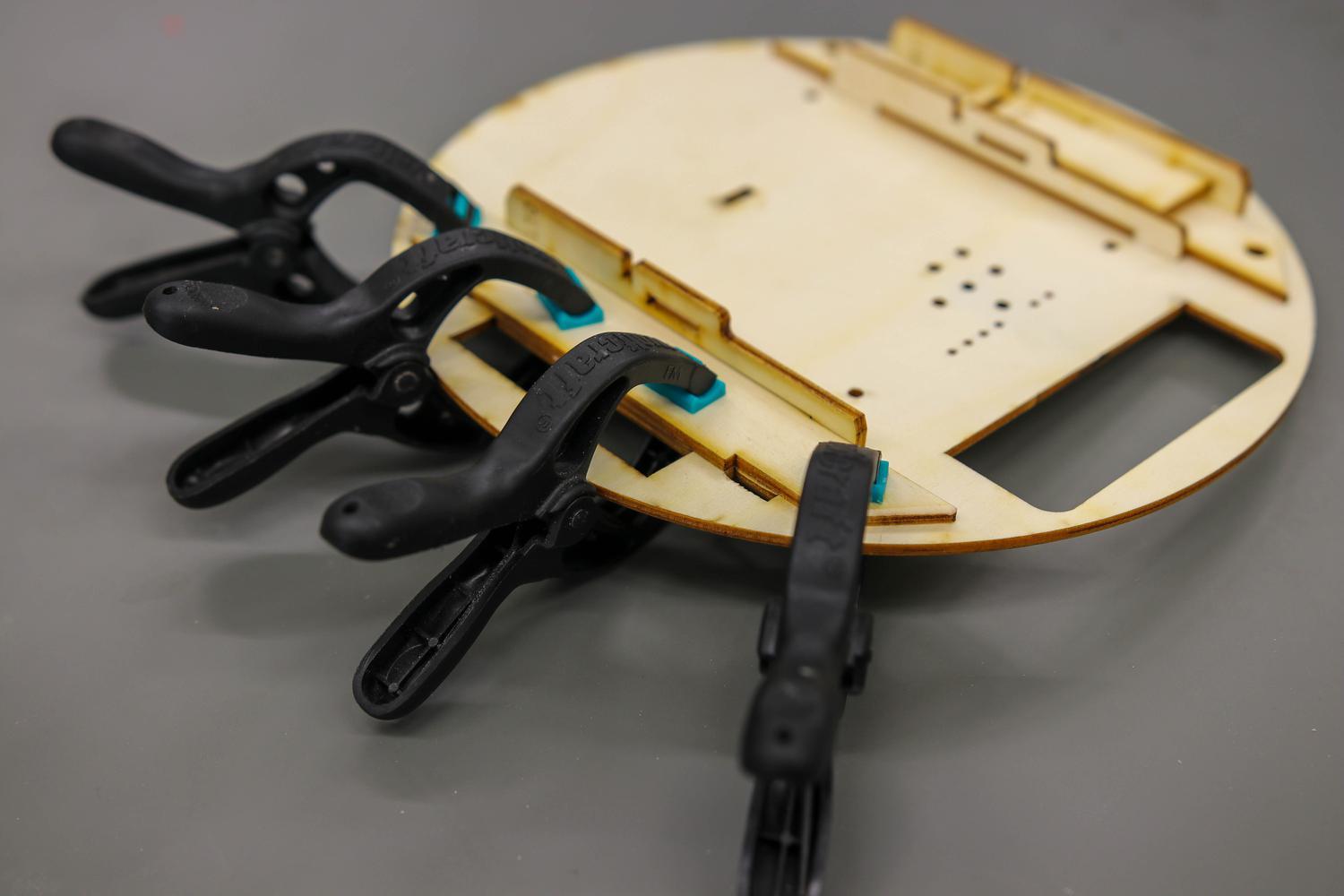
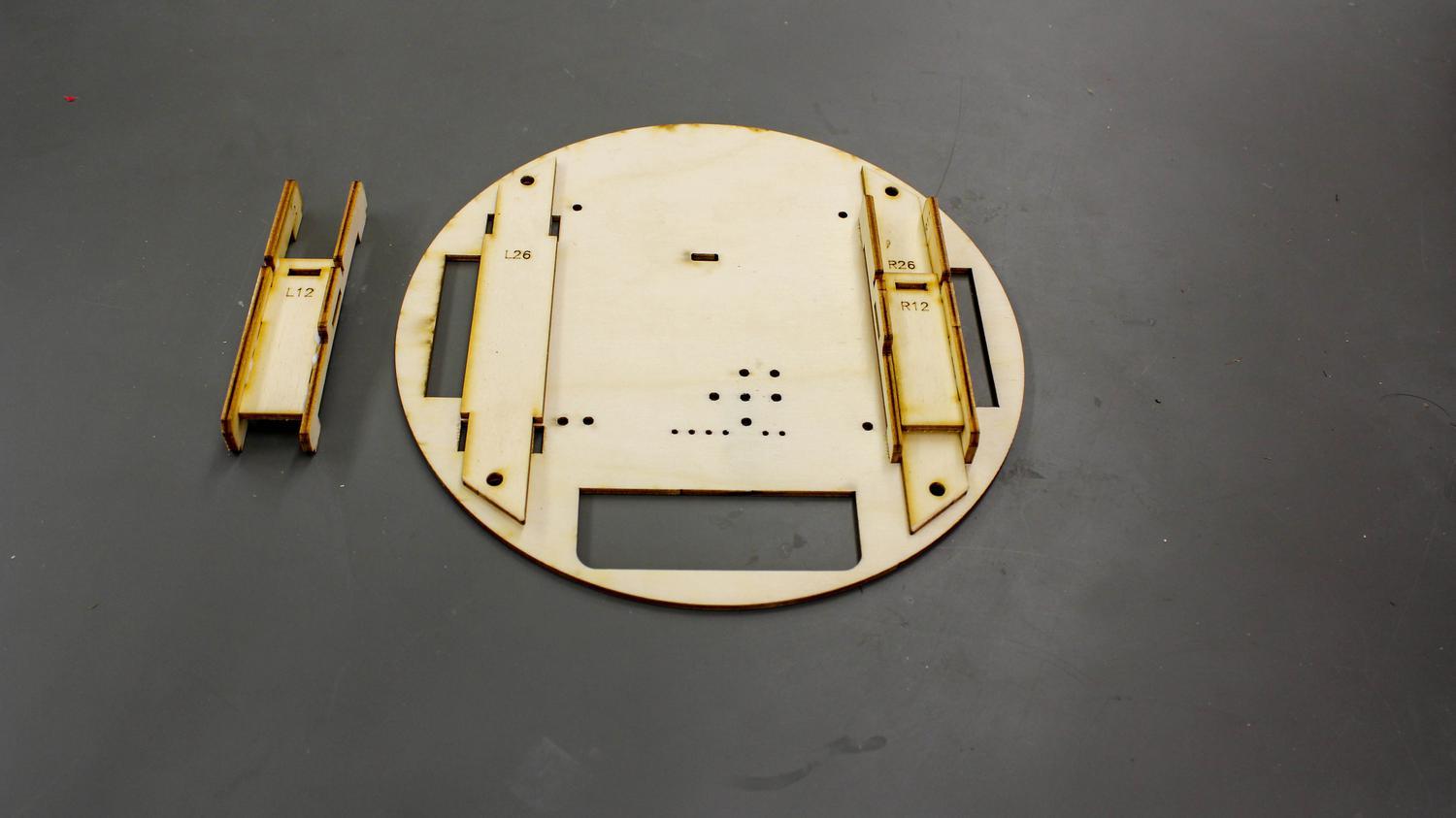
Díl L26 přilepte za pomoci díku L10 stejně jako na druhé straně (nelepte jej)
13
14
15
16
17
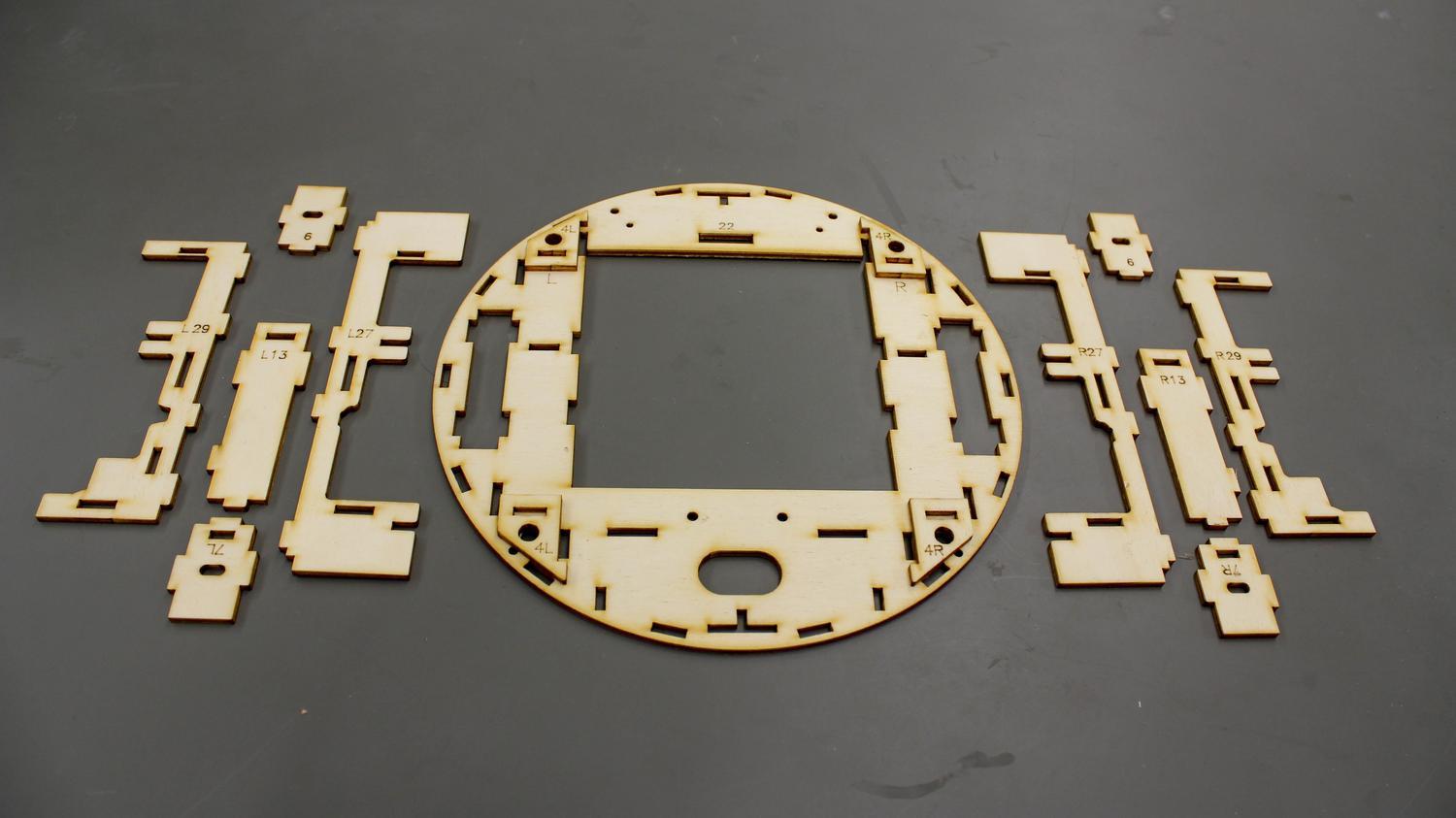
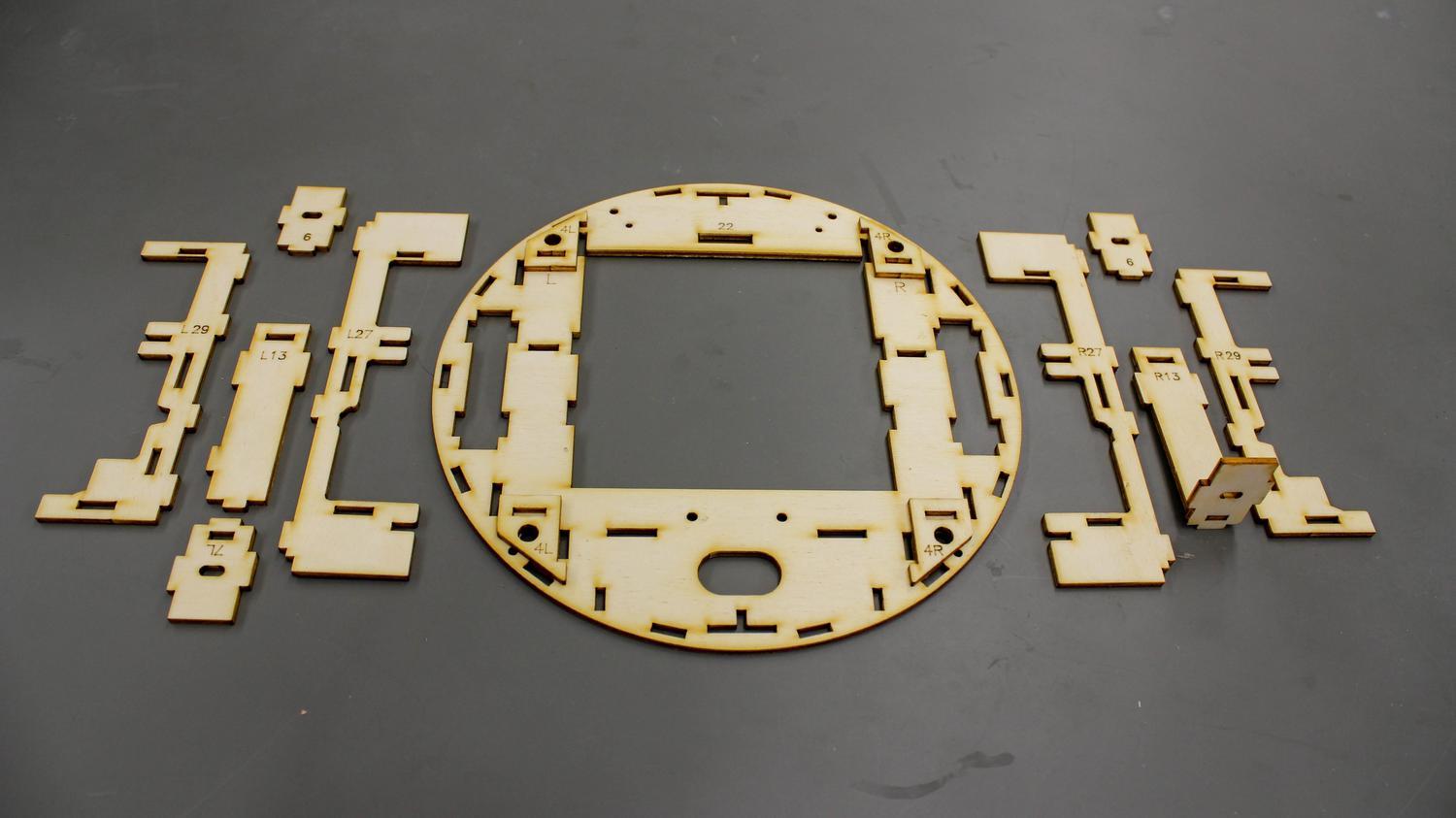
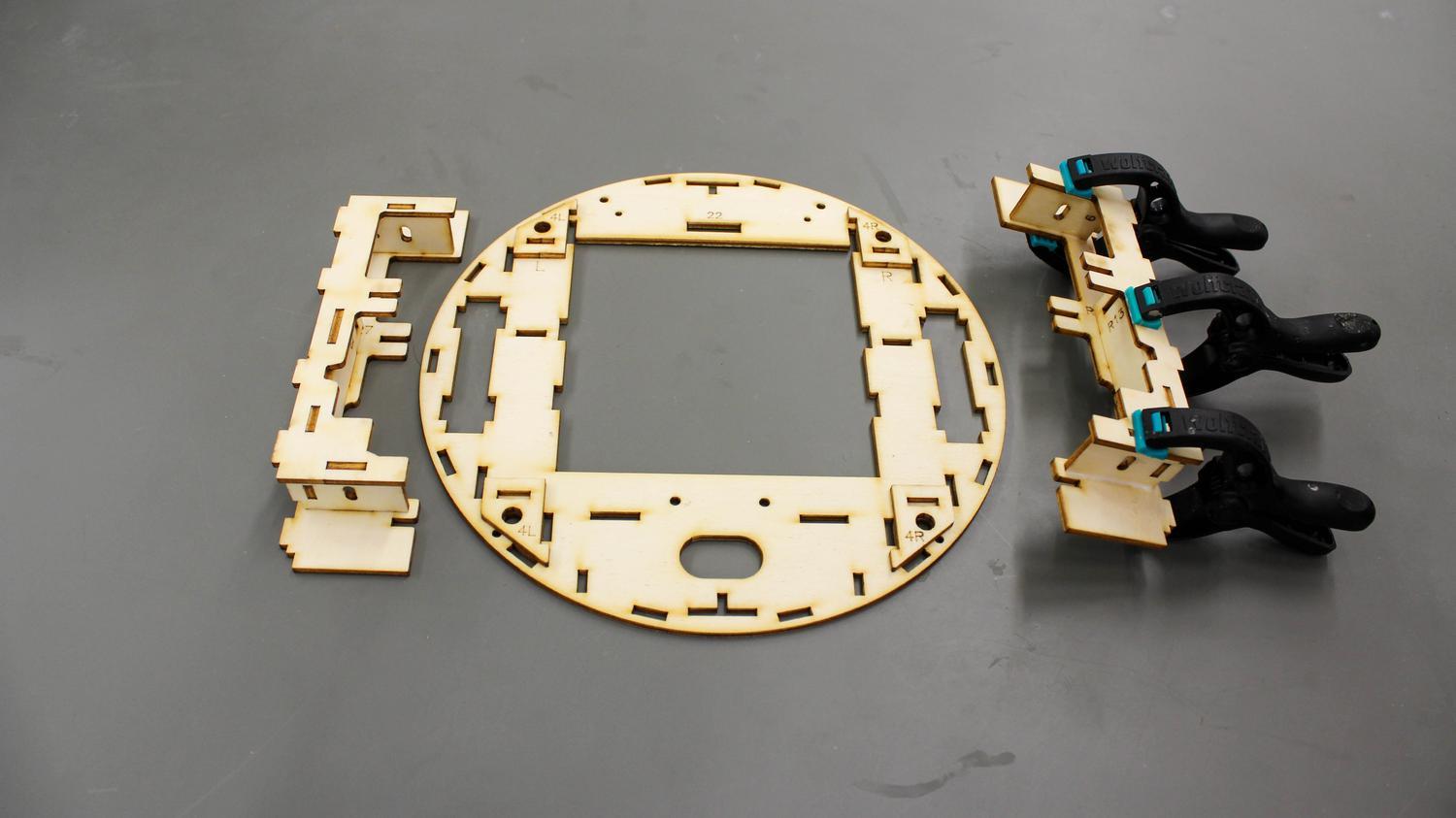
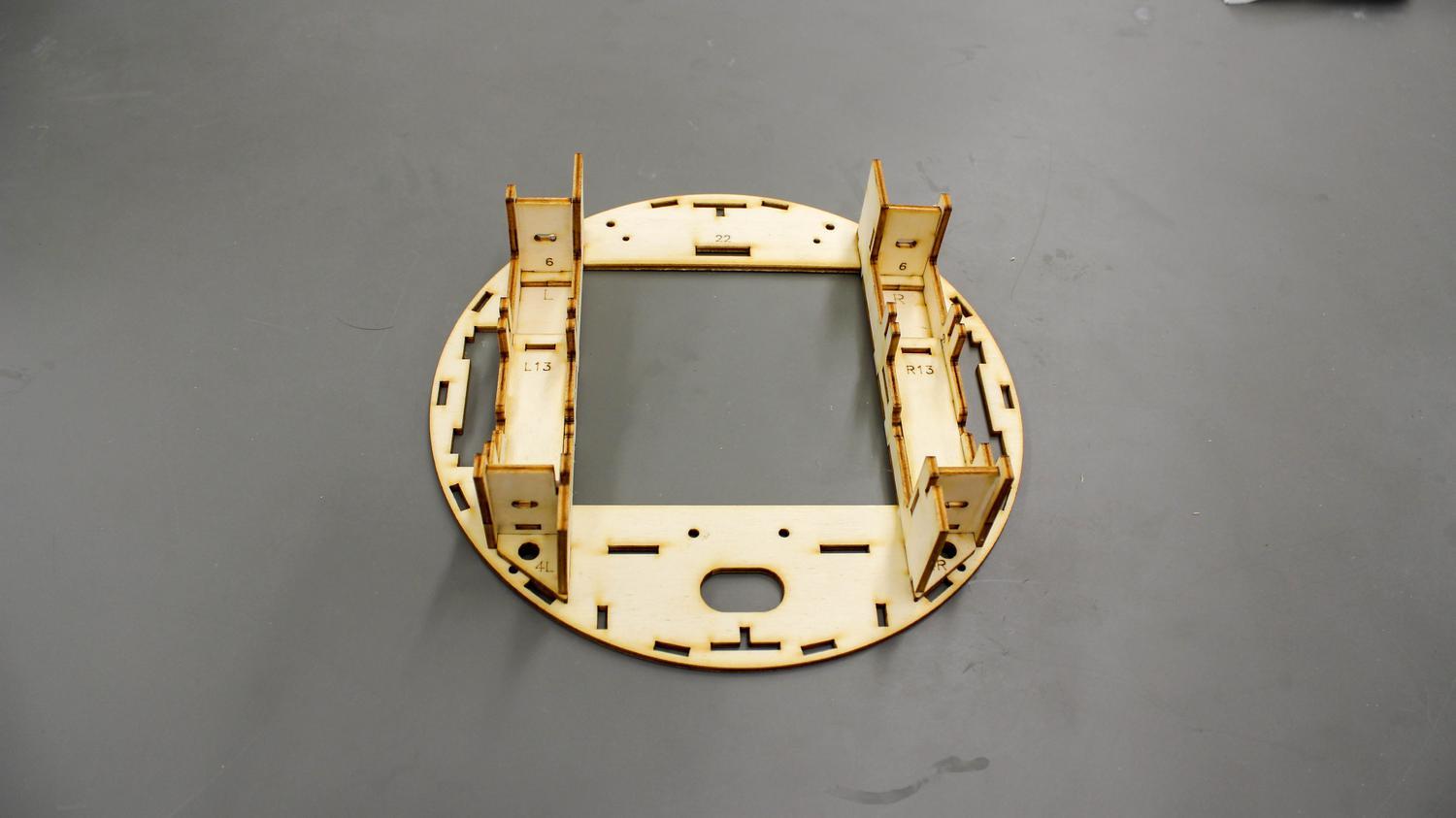
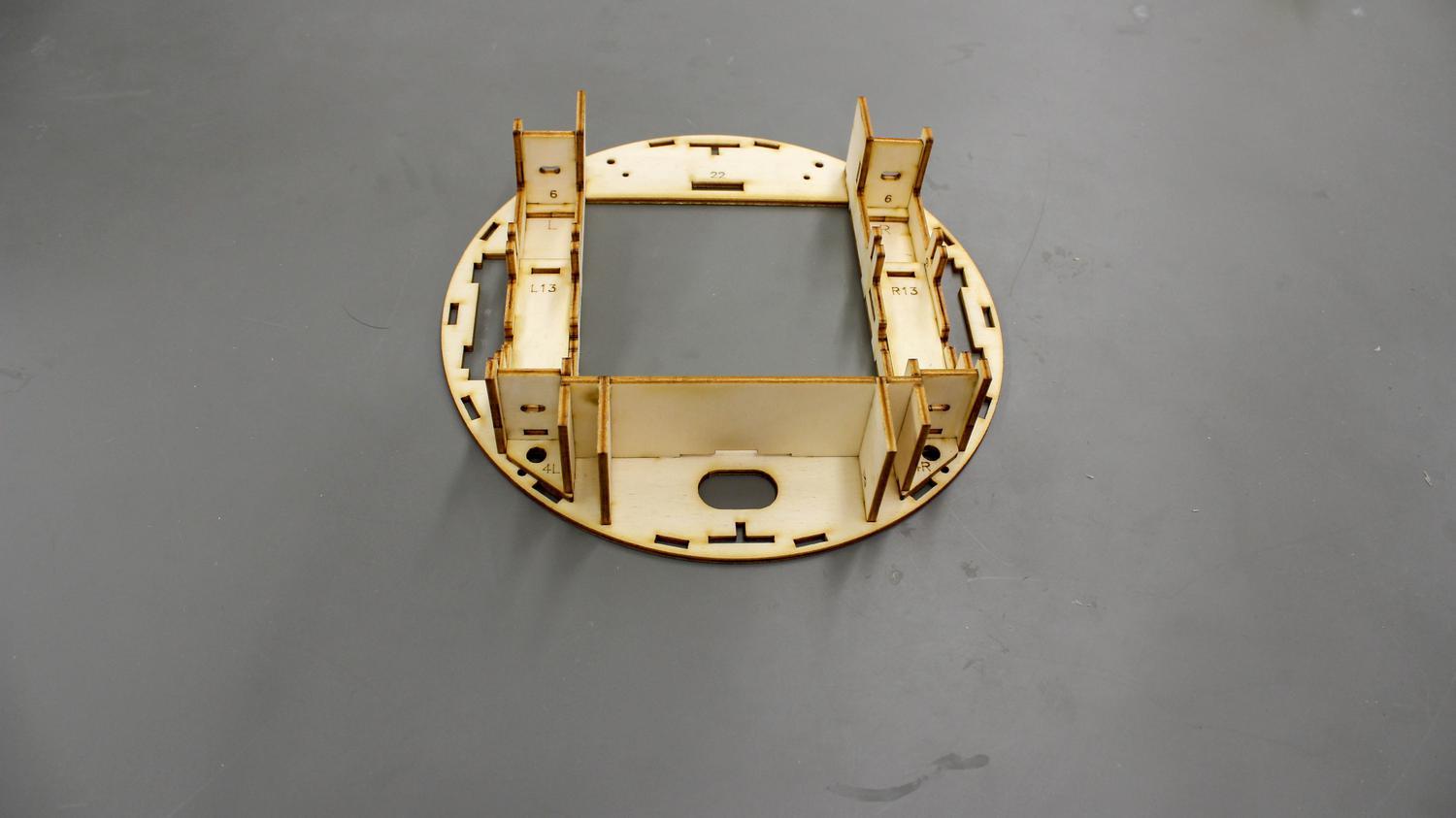
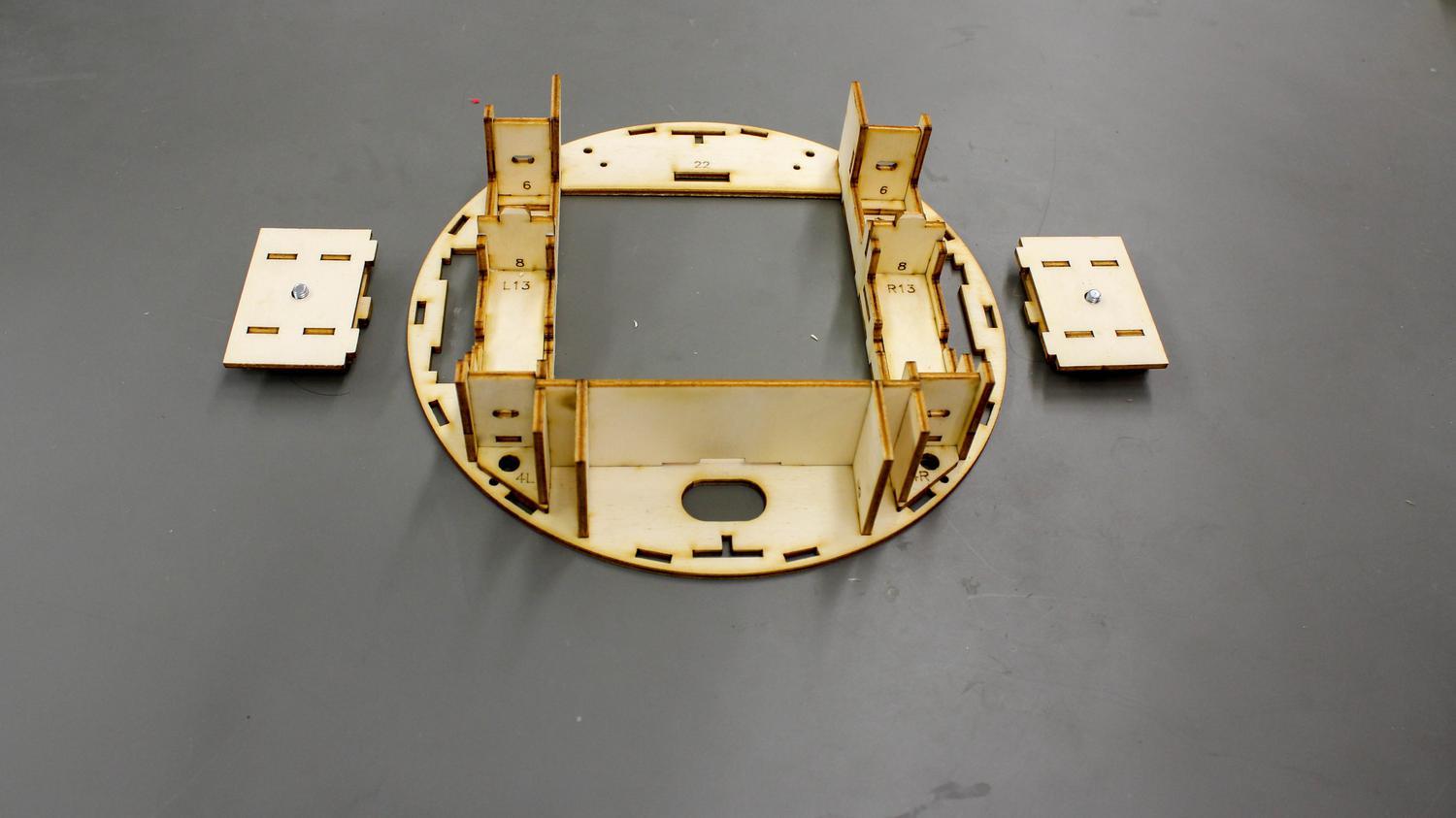
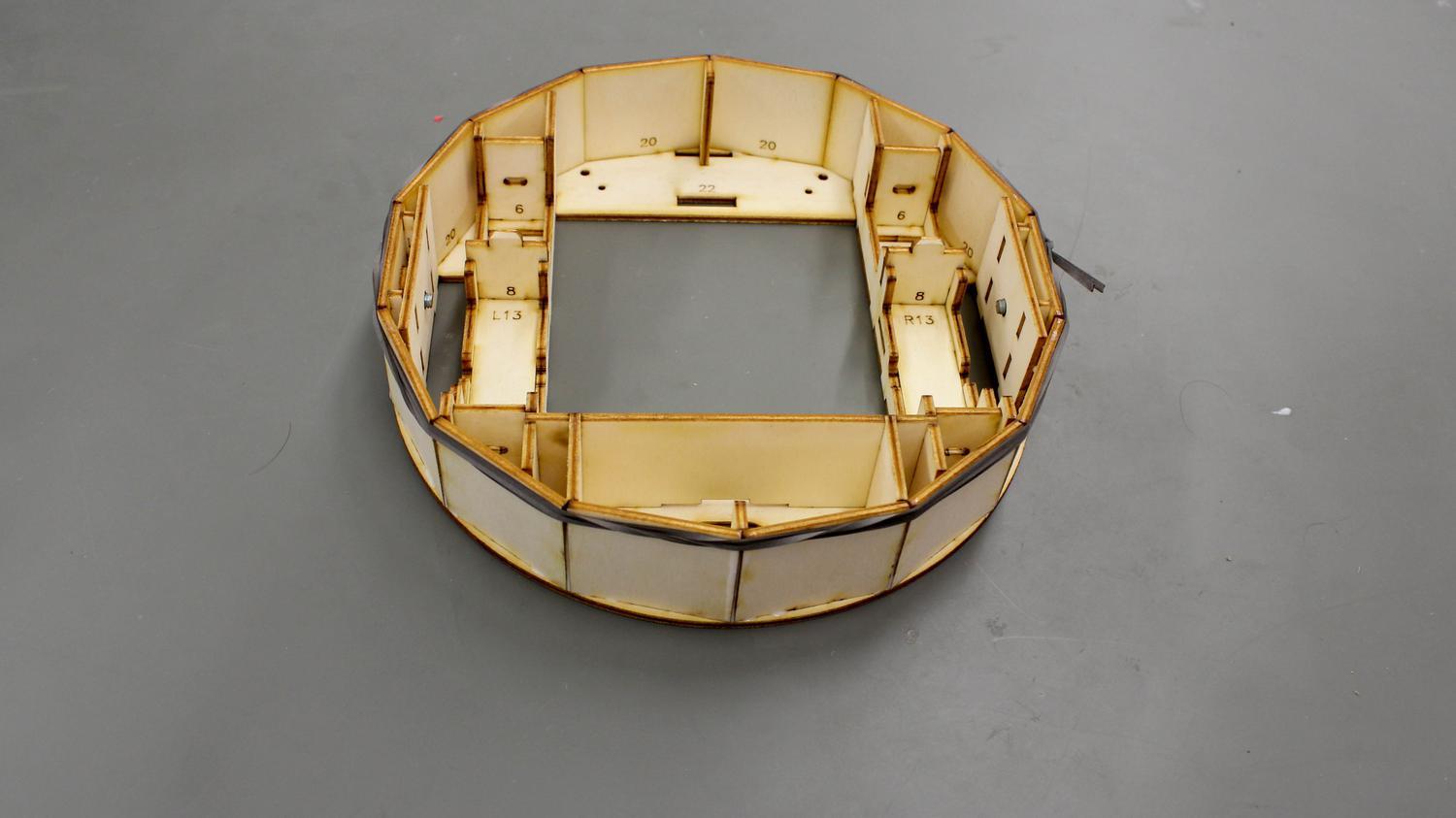
Podvozek
Připravíme si pilník nebo brusný papír, ostrý nůž (ideálně skalpel) a lepidlo Herkules.
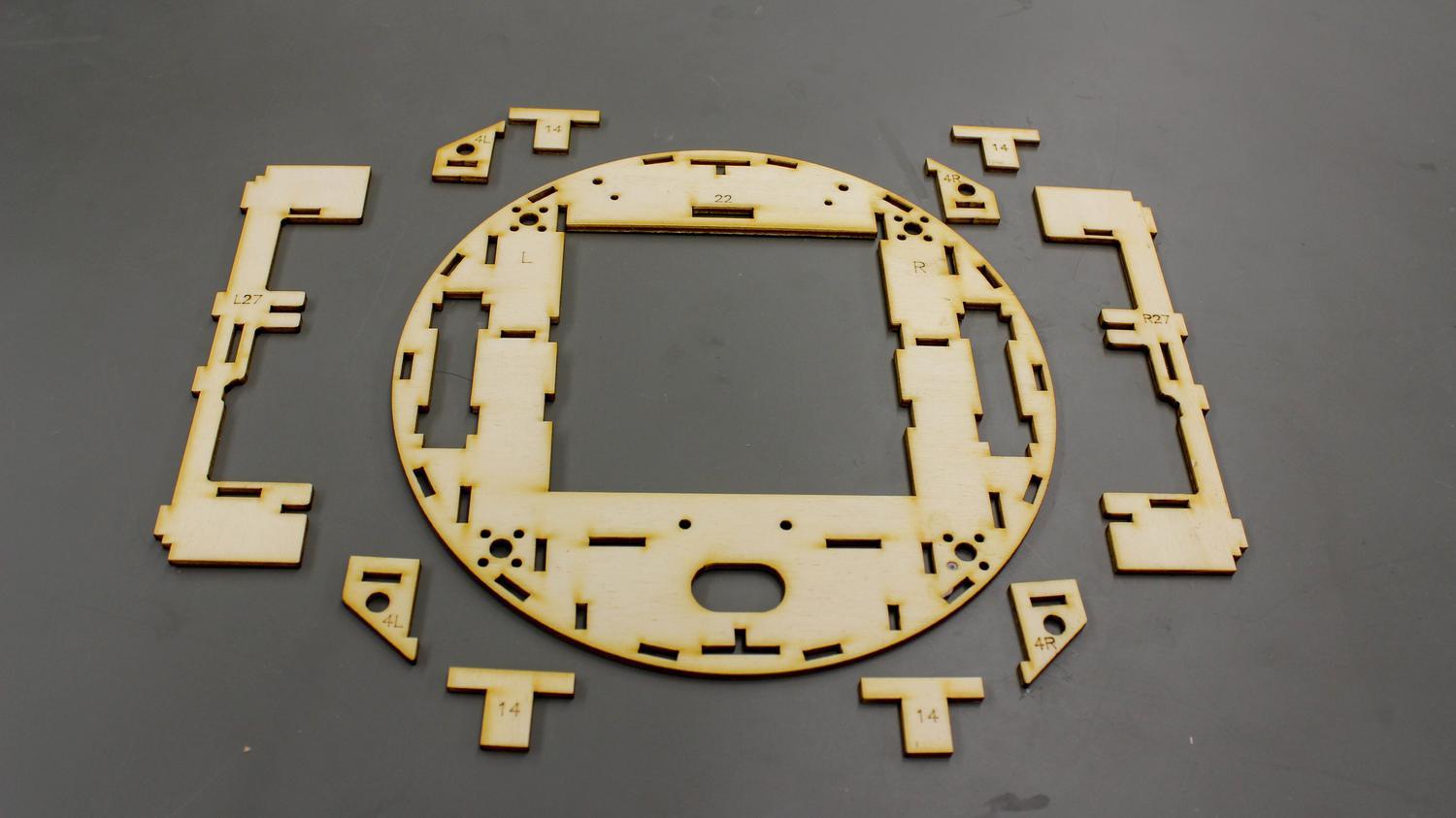
1
2
3
4
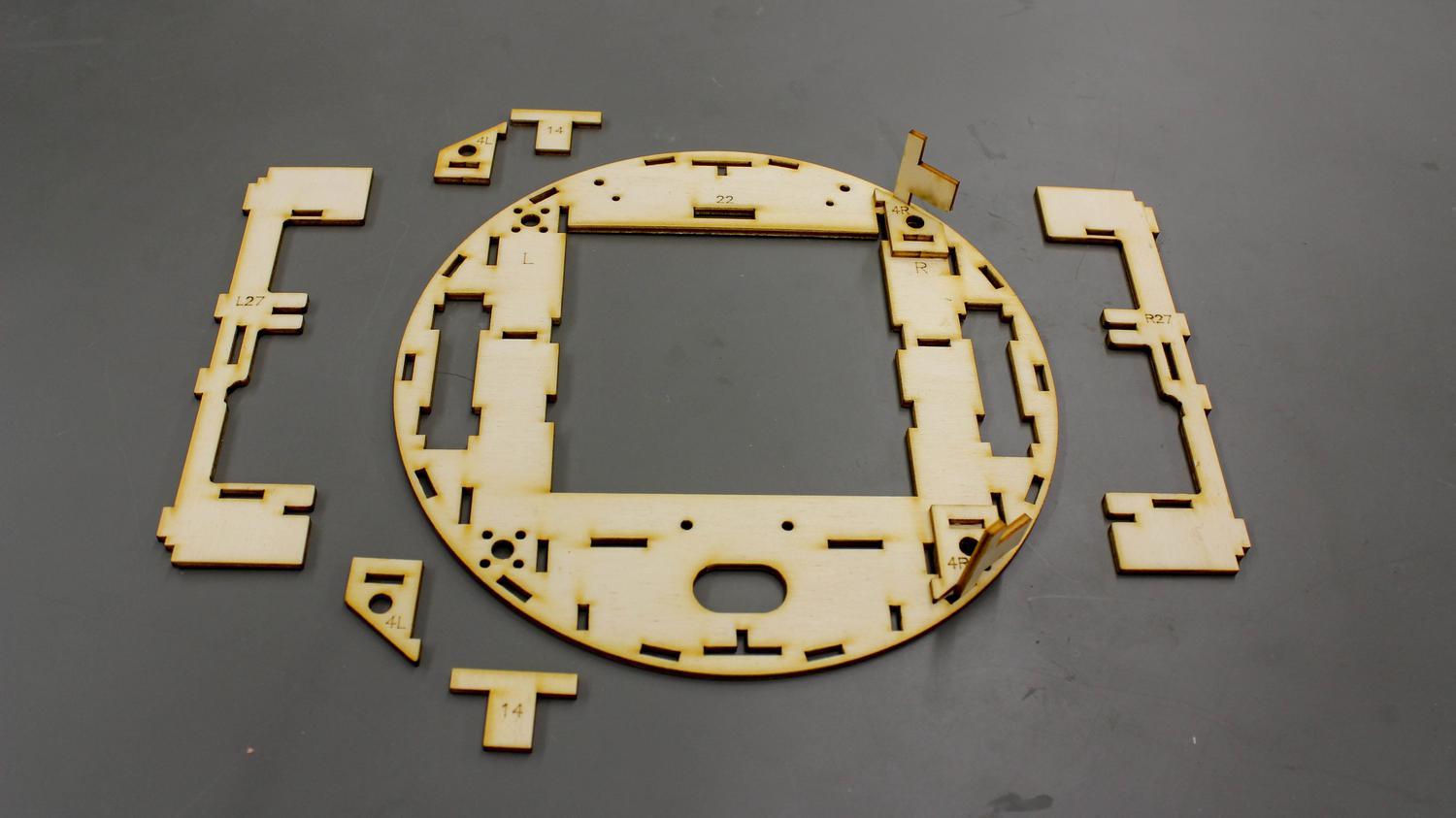
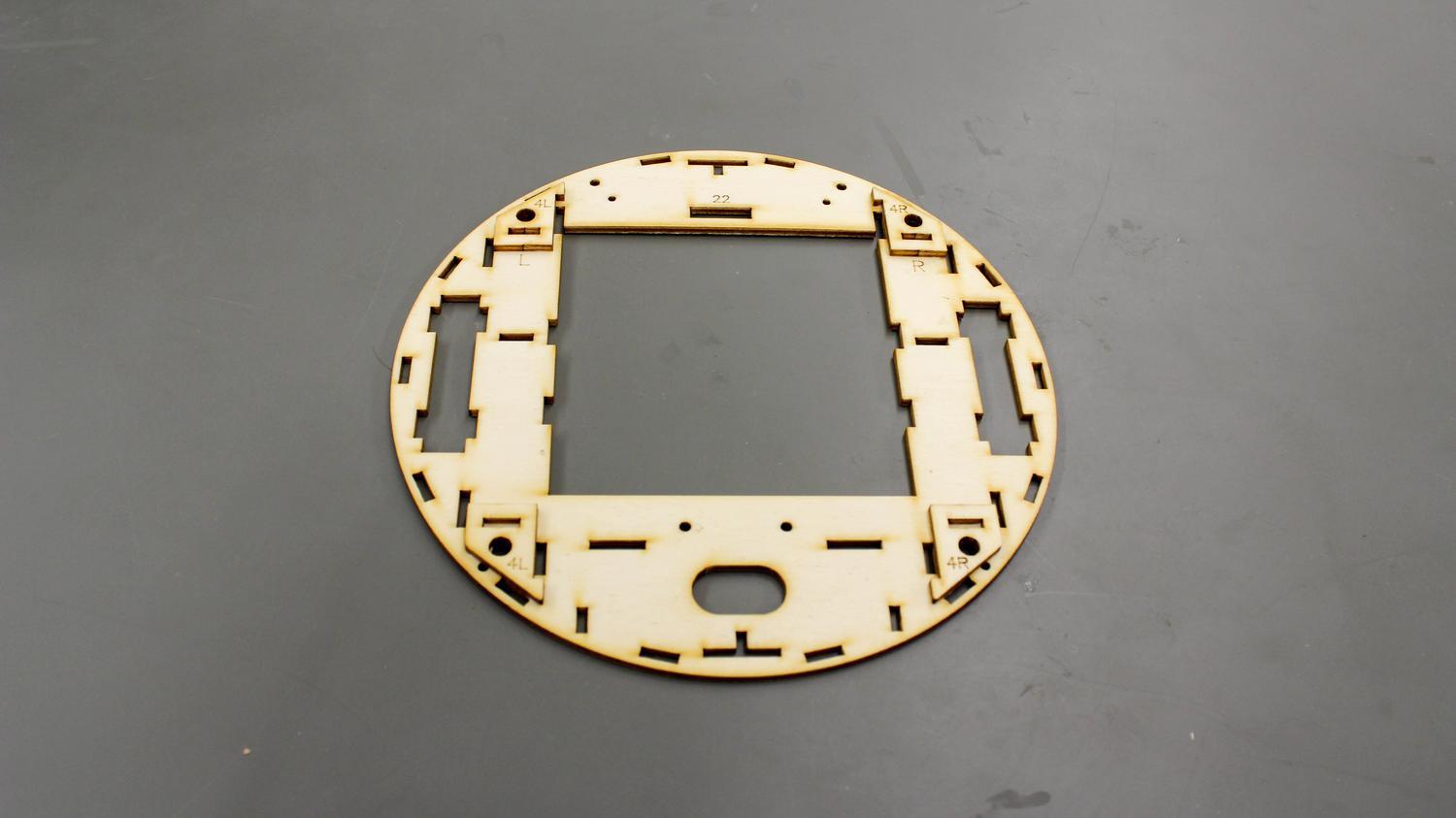
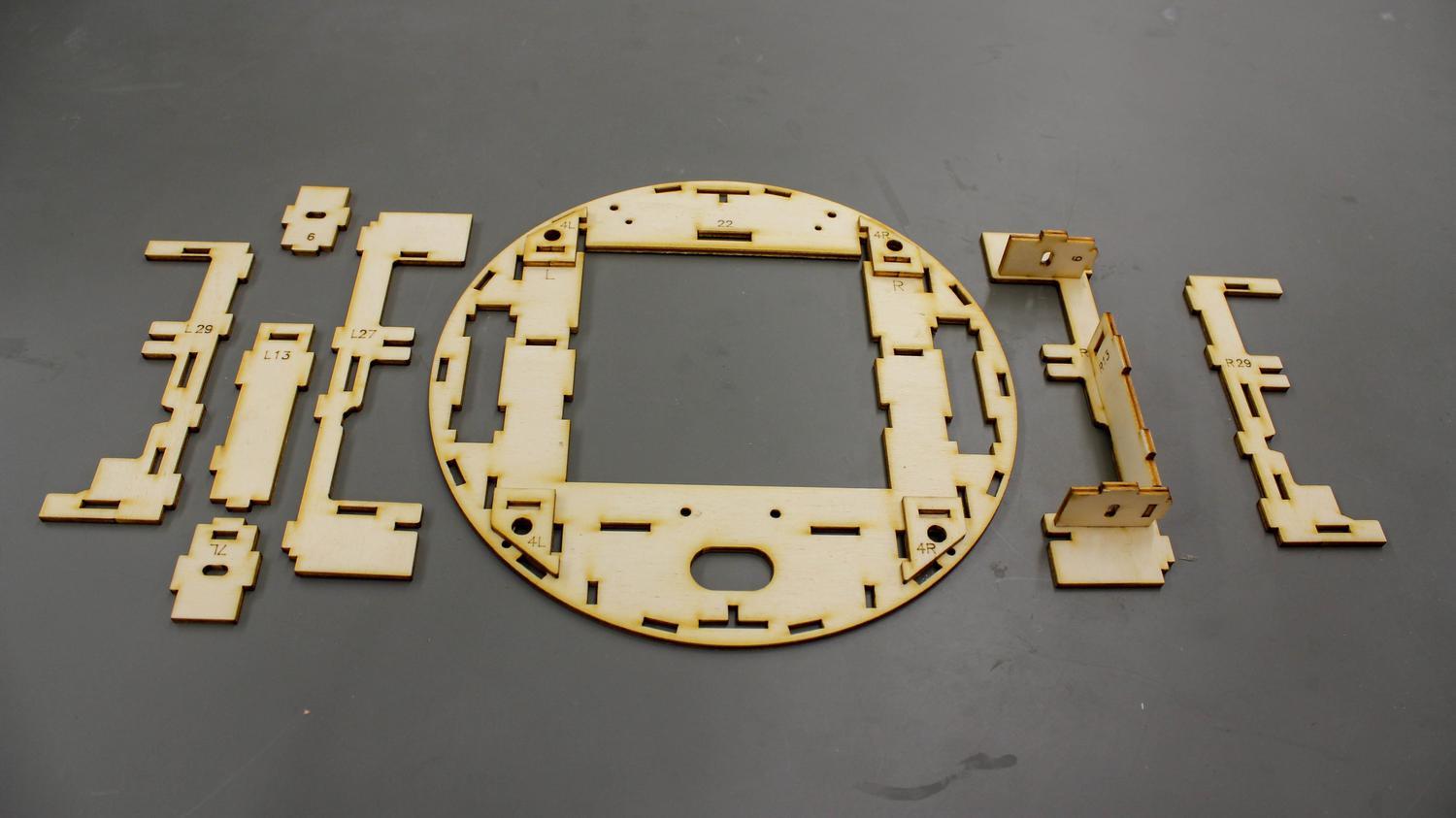
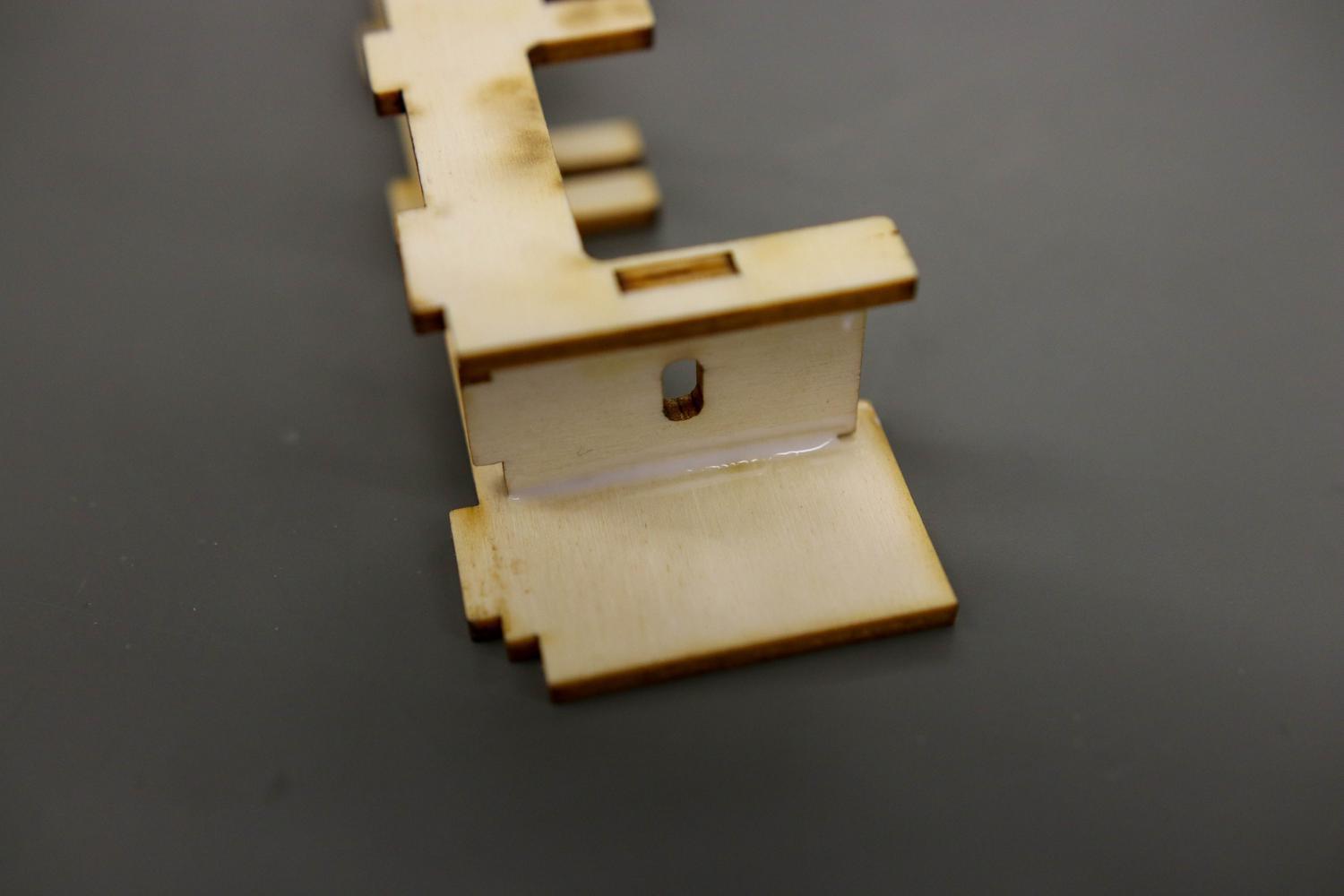
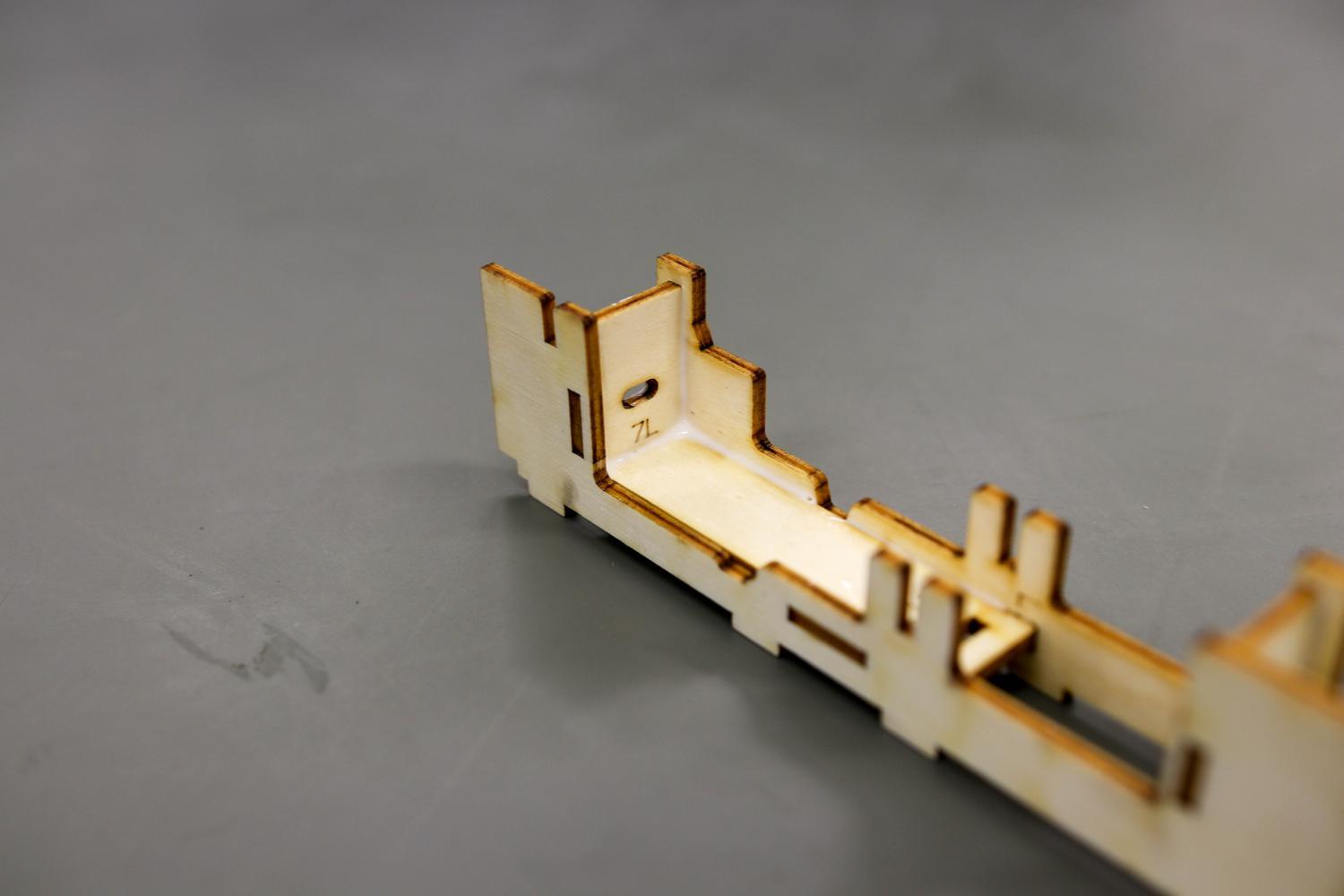
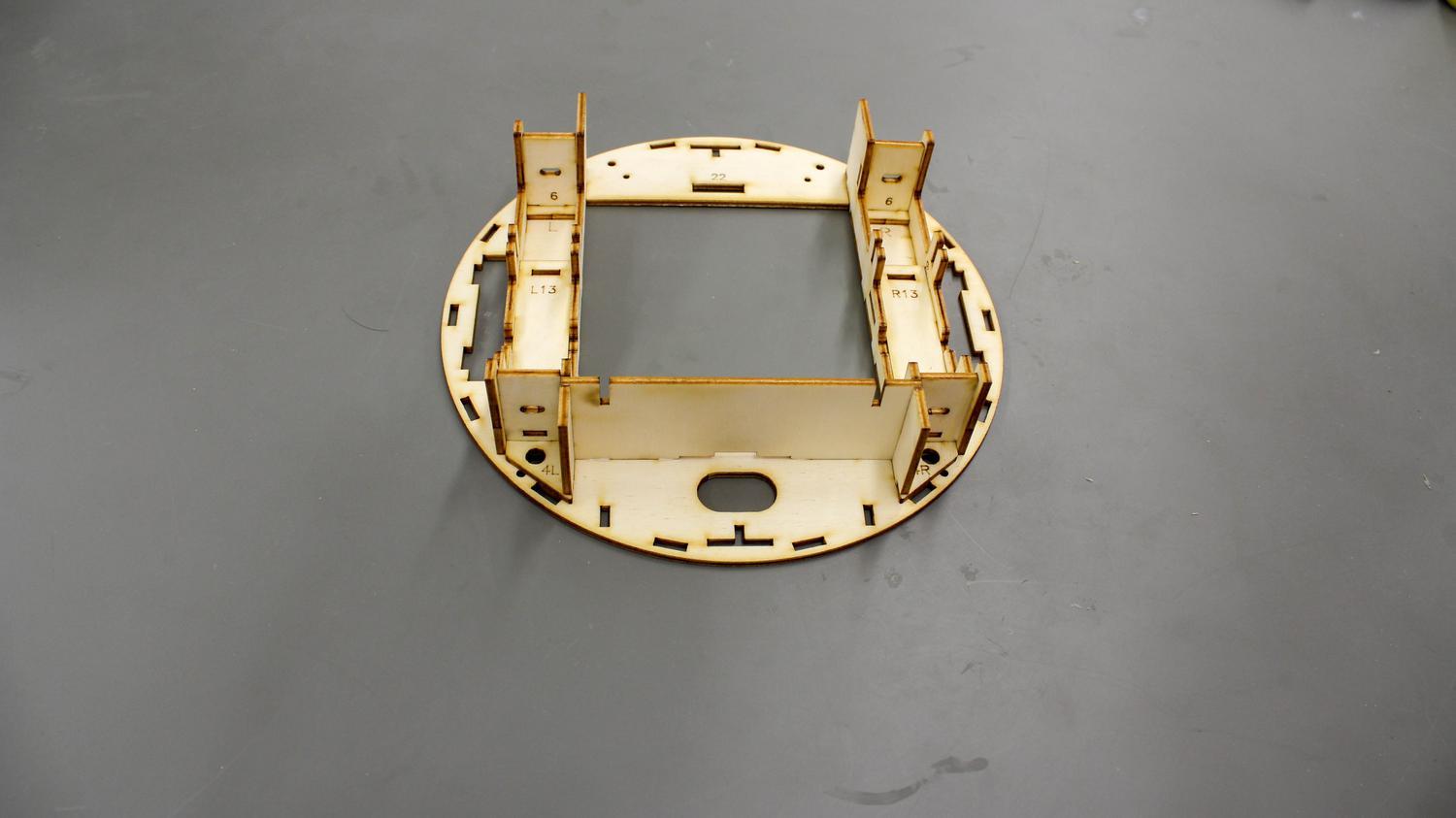
Poté co jsme si dílky vyzkoušeli složit nasucho přilepíme pouze dílky 4L a 4R
5
6
7
8
9
10
11
12
13
14
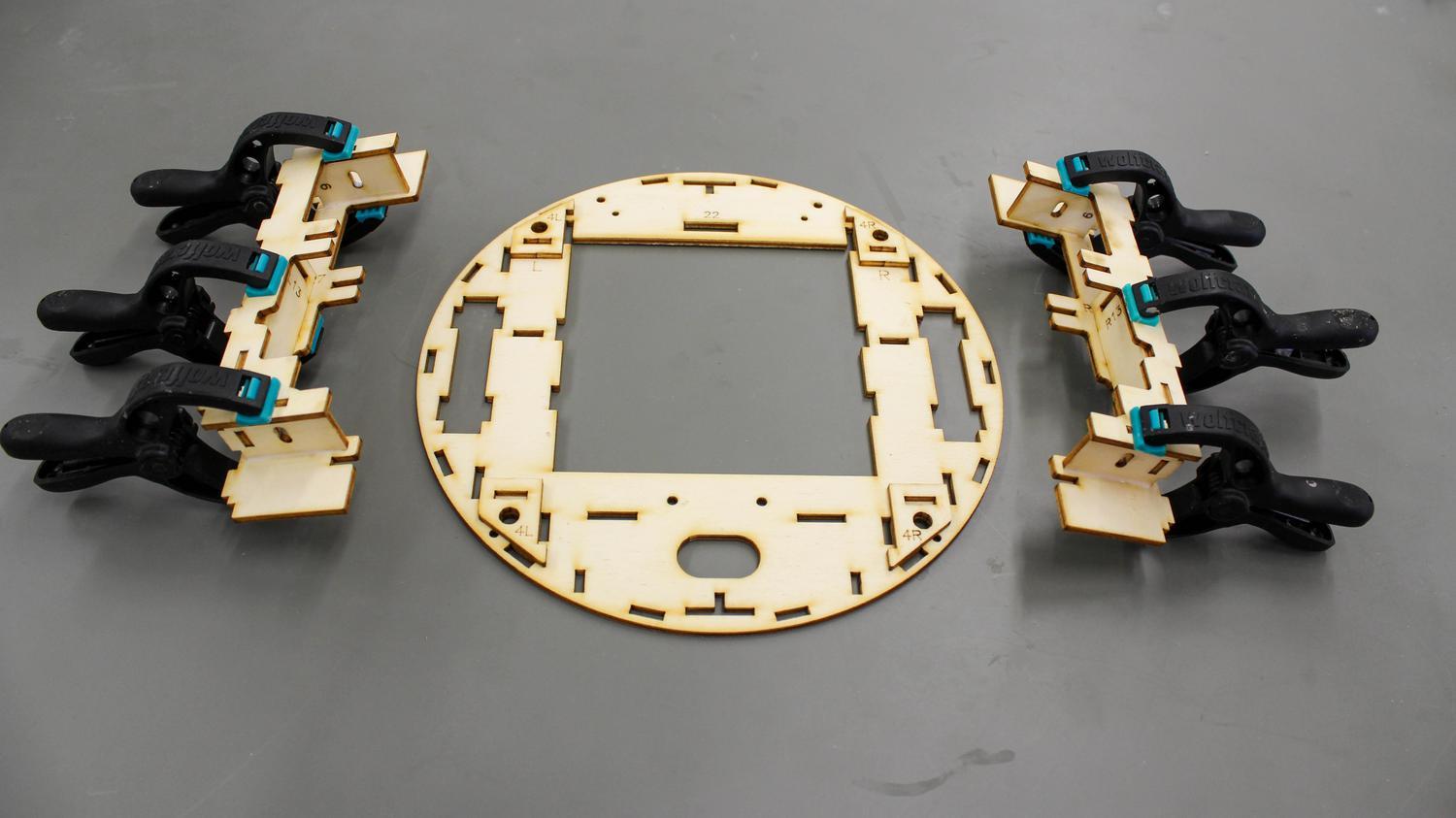
Přebytečné lepidlo utřeme ubrouskem
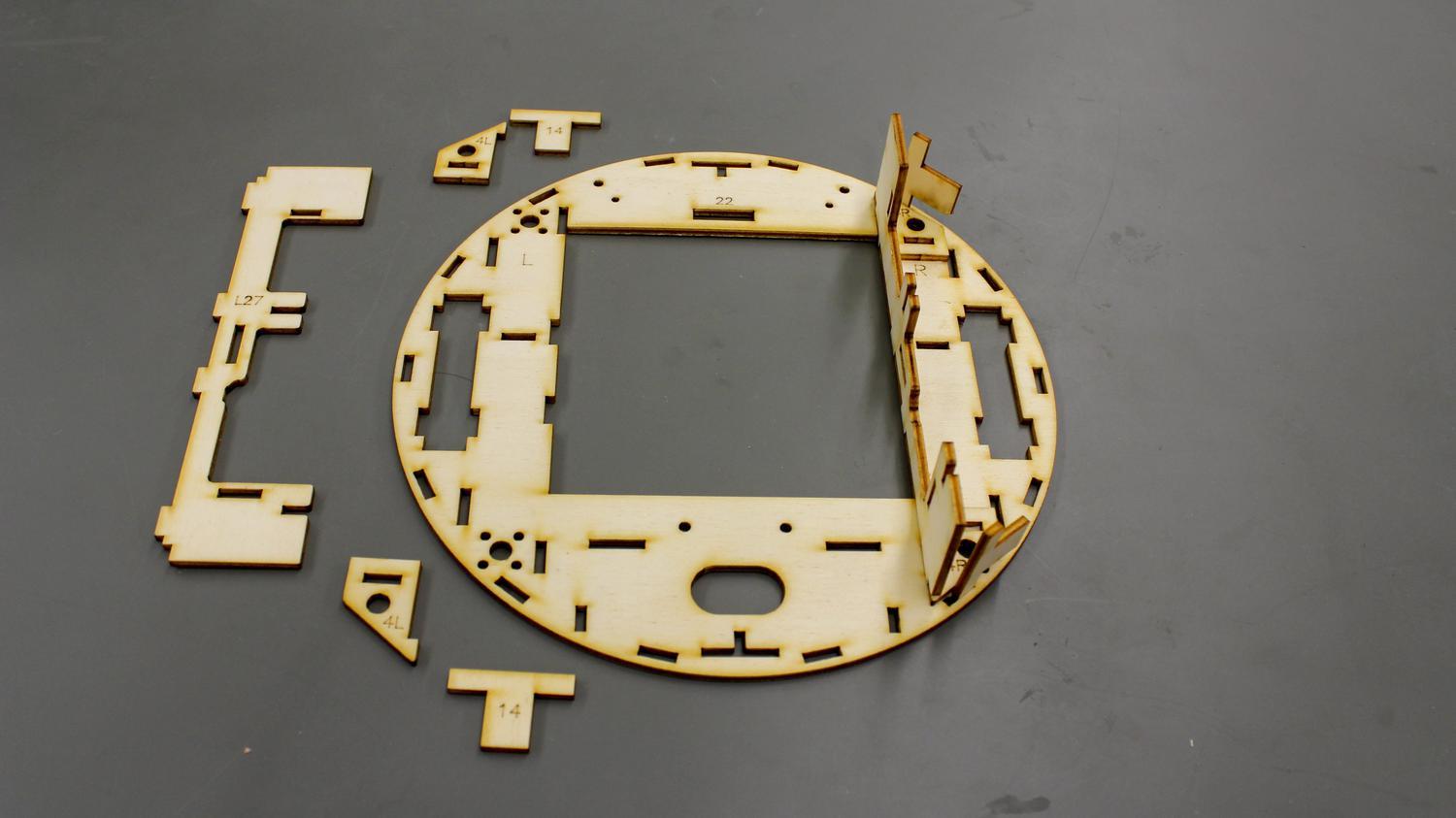
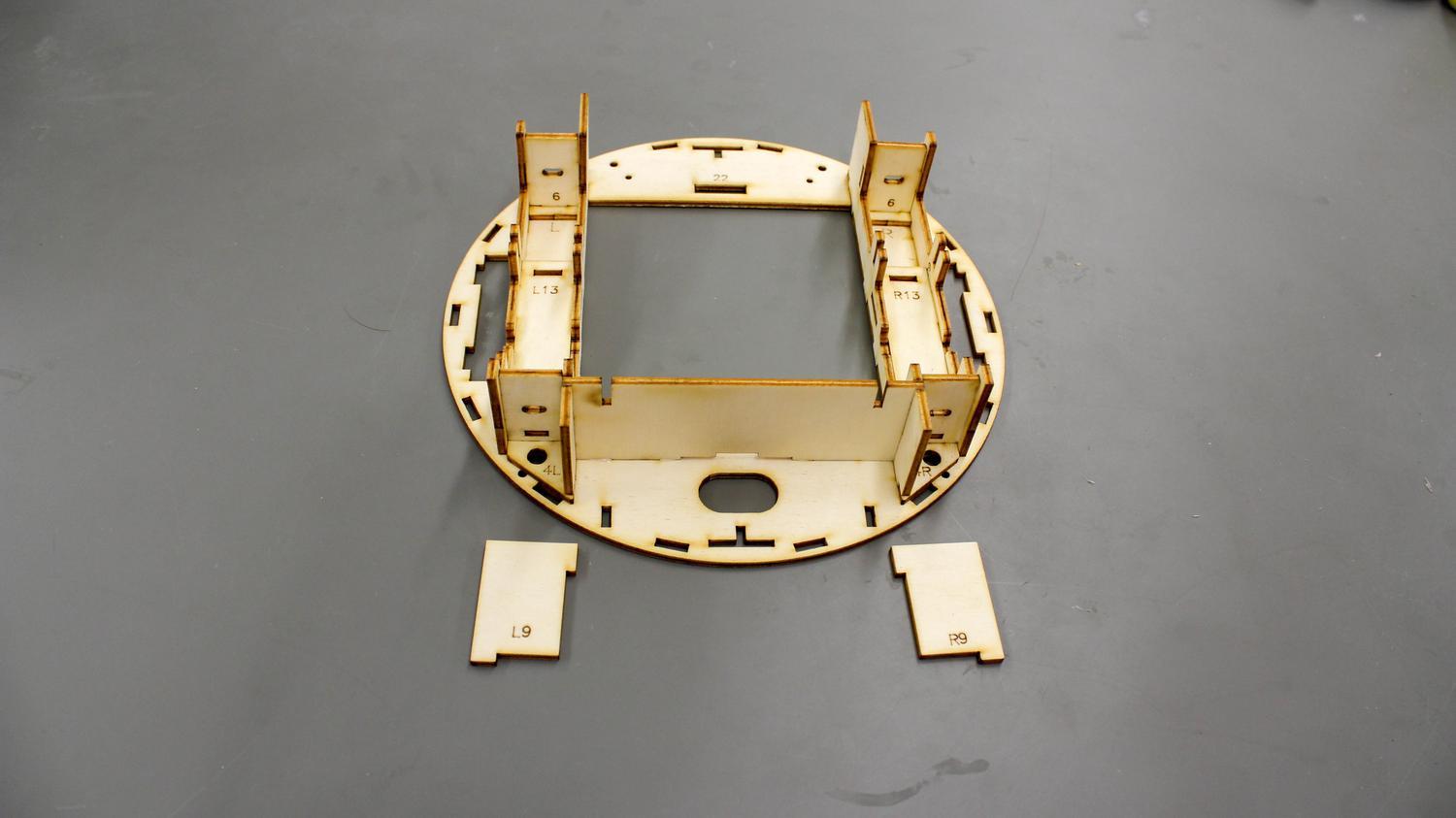
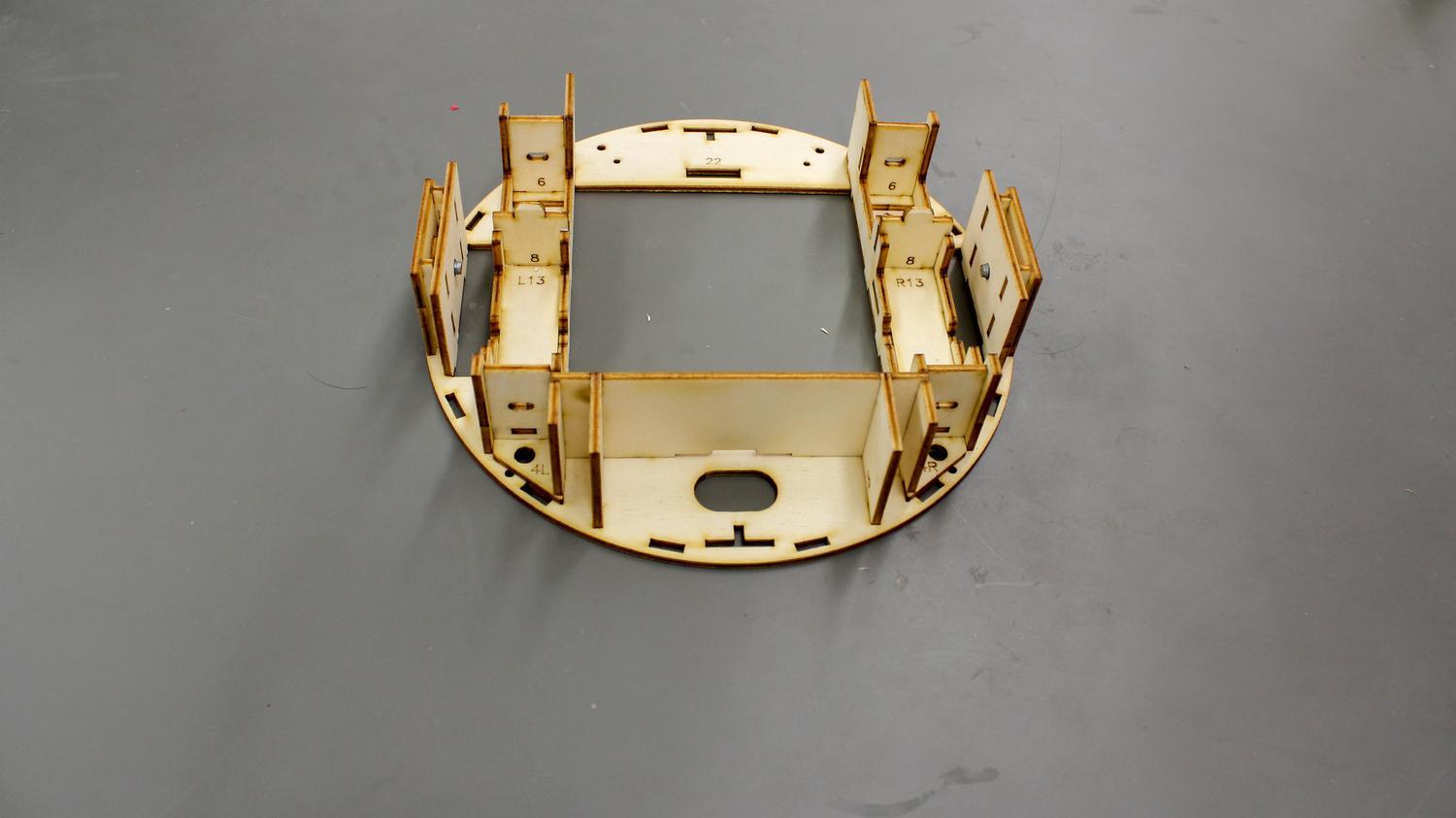
17
18
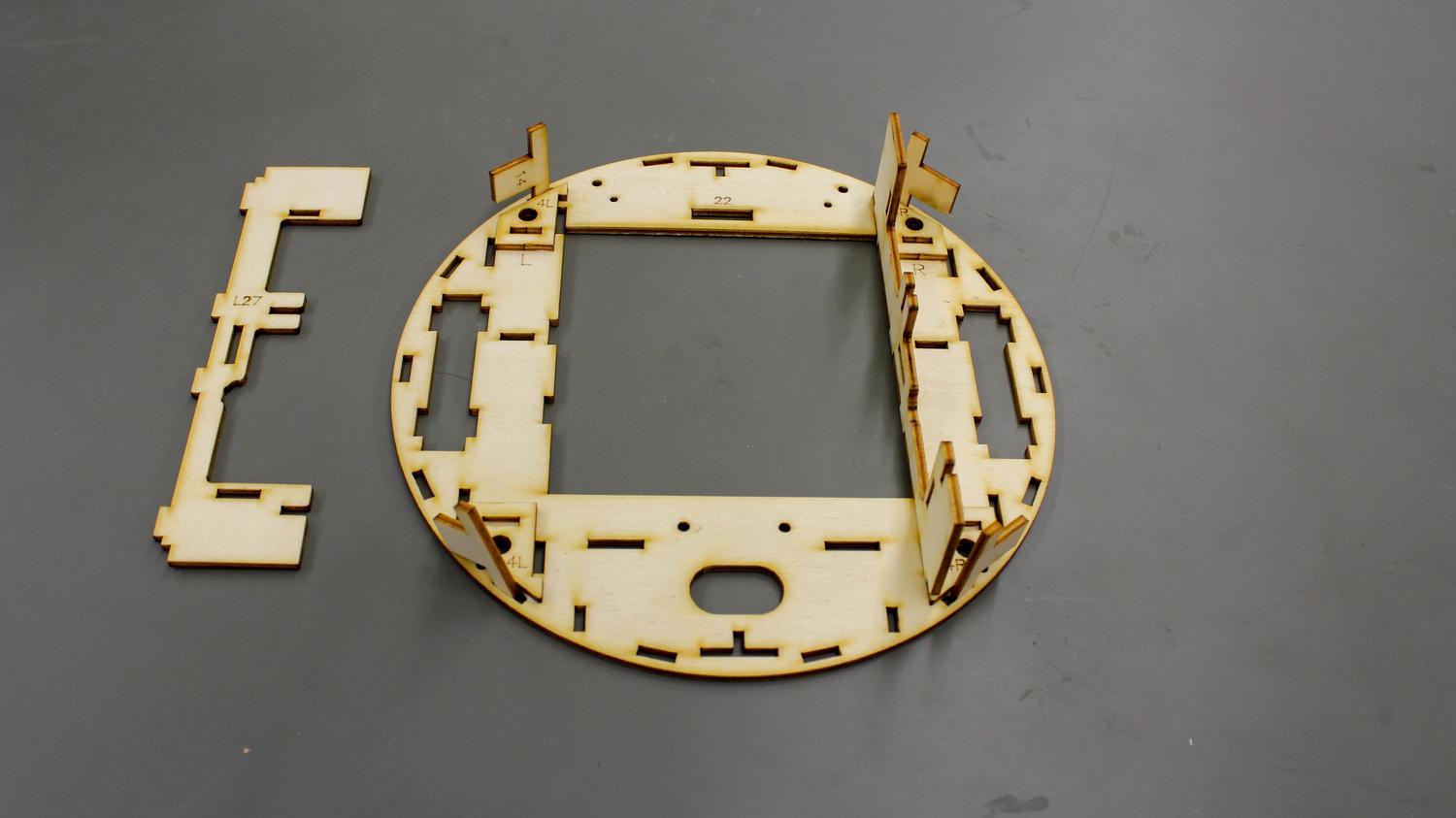
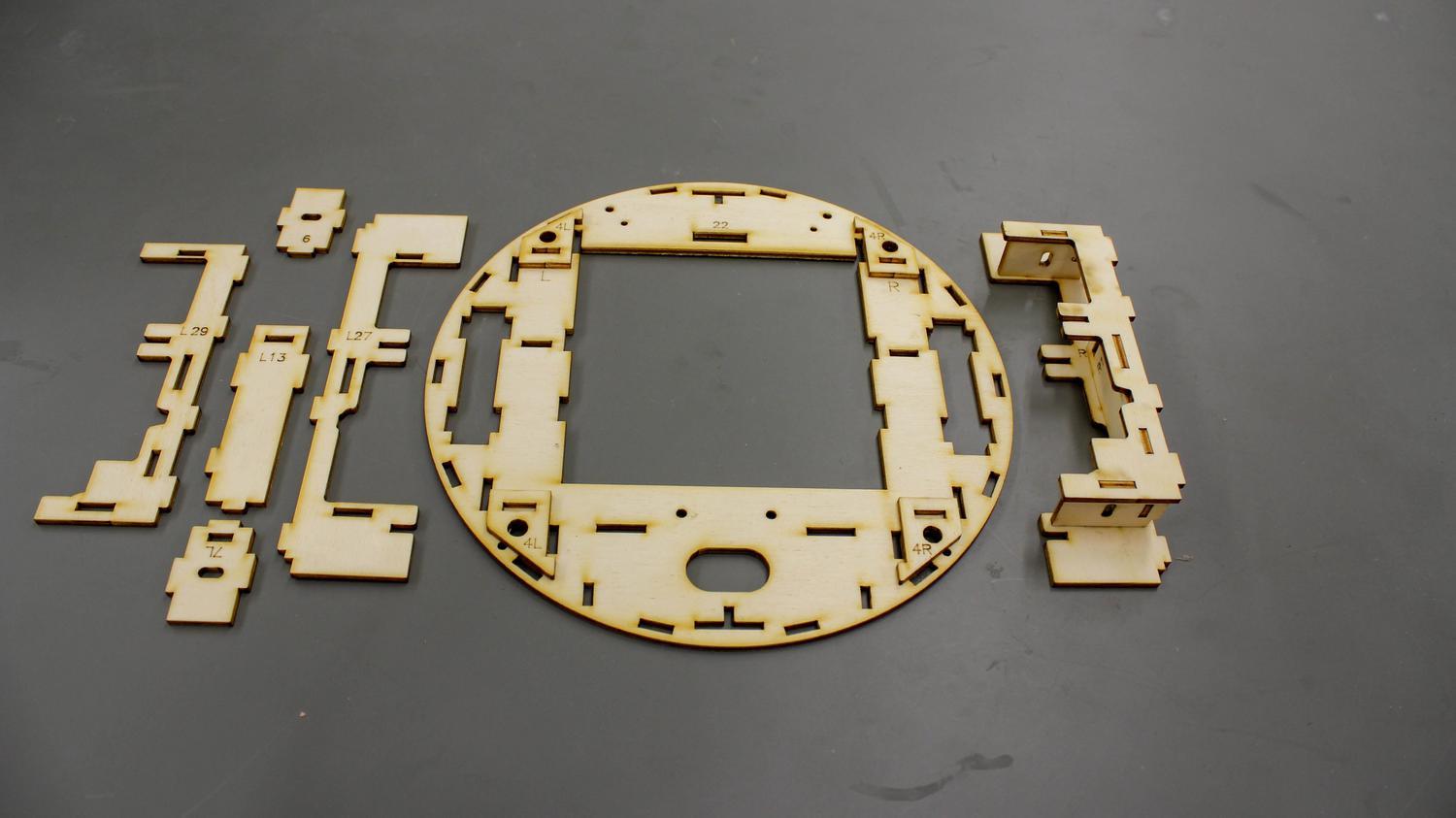
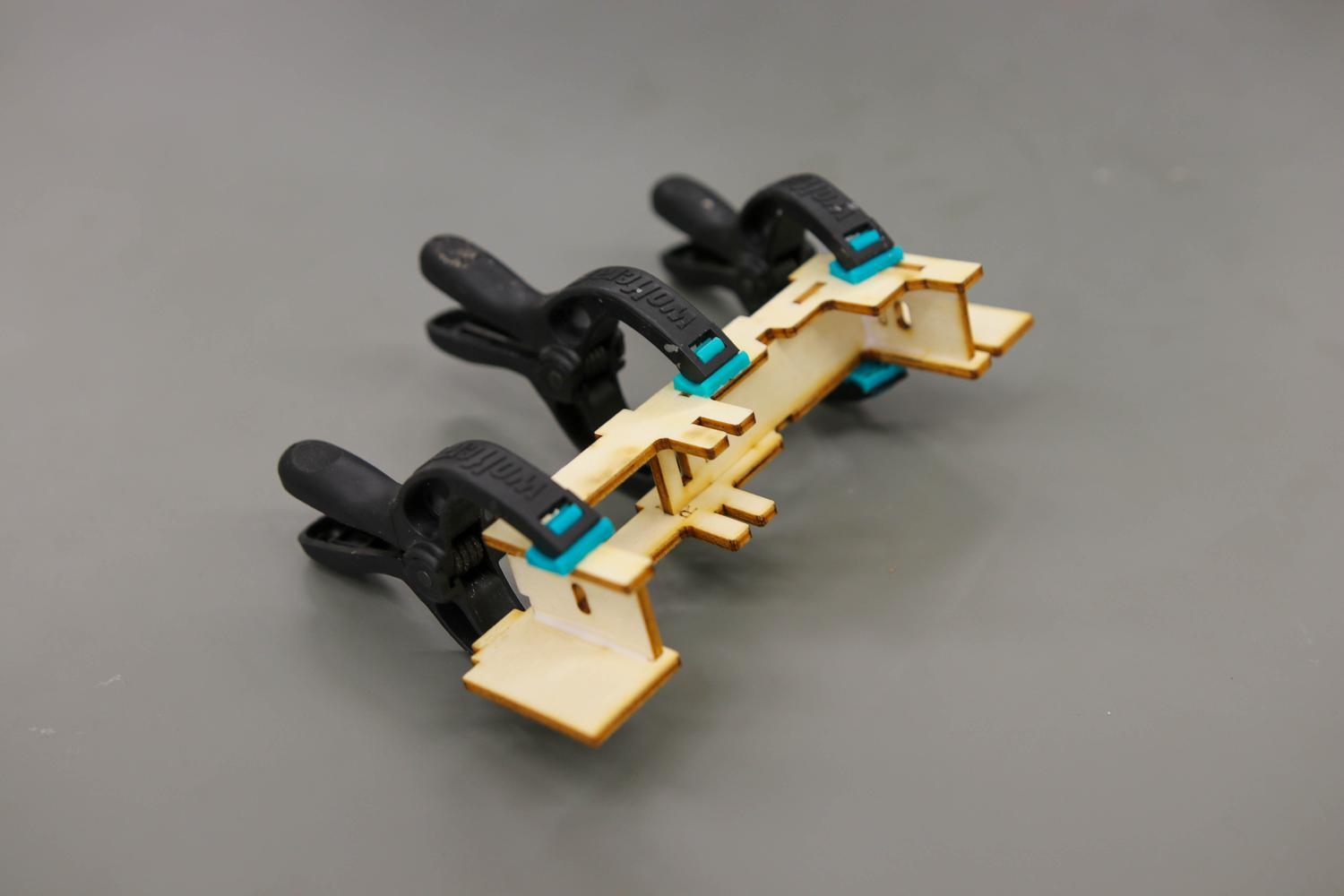
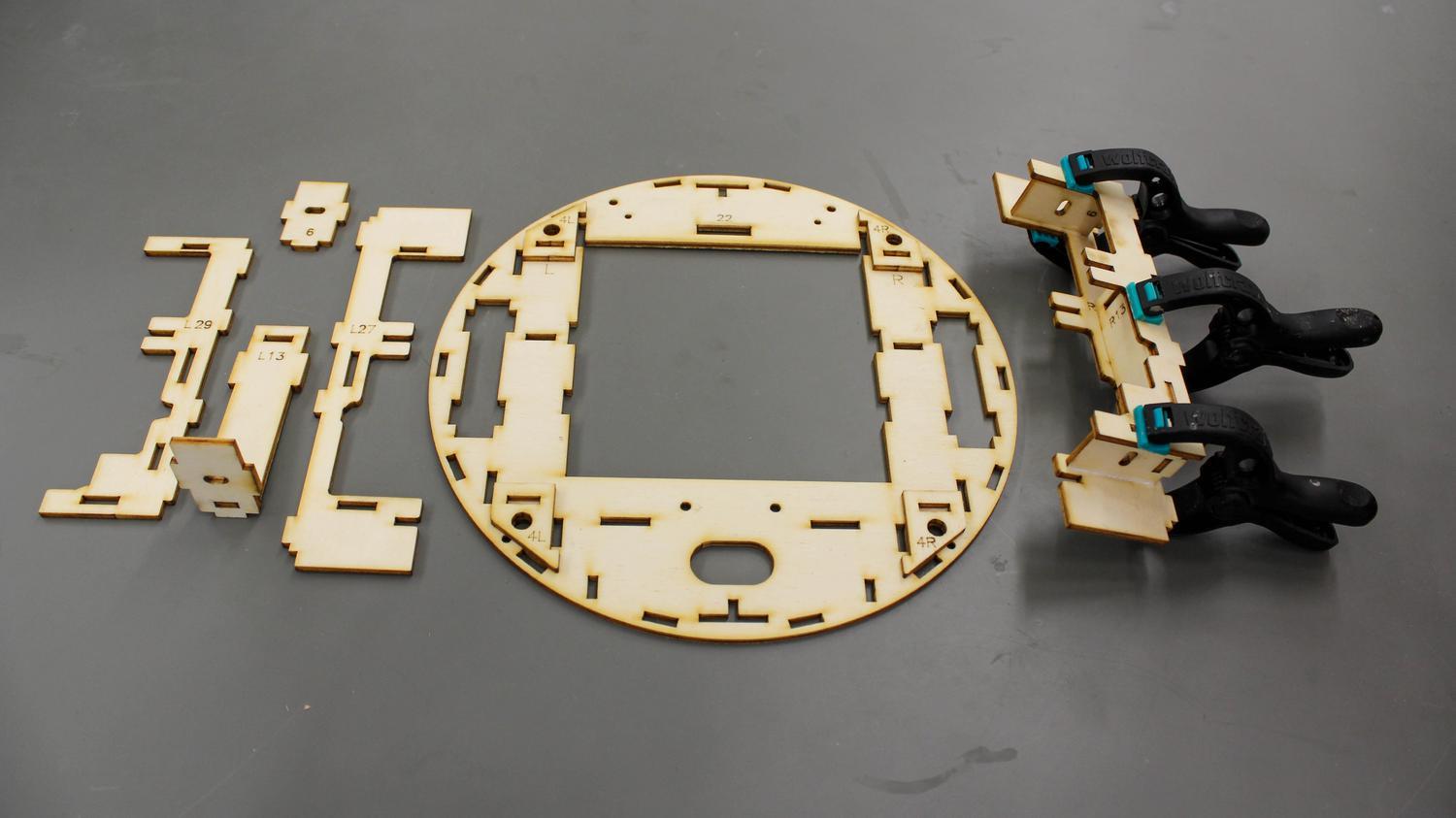
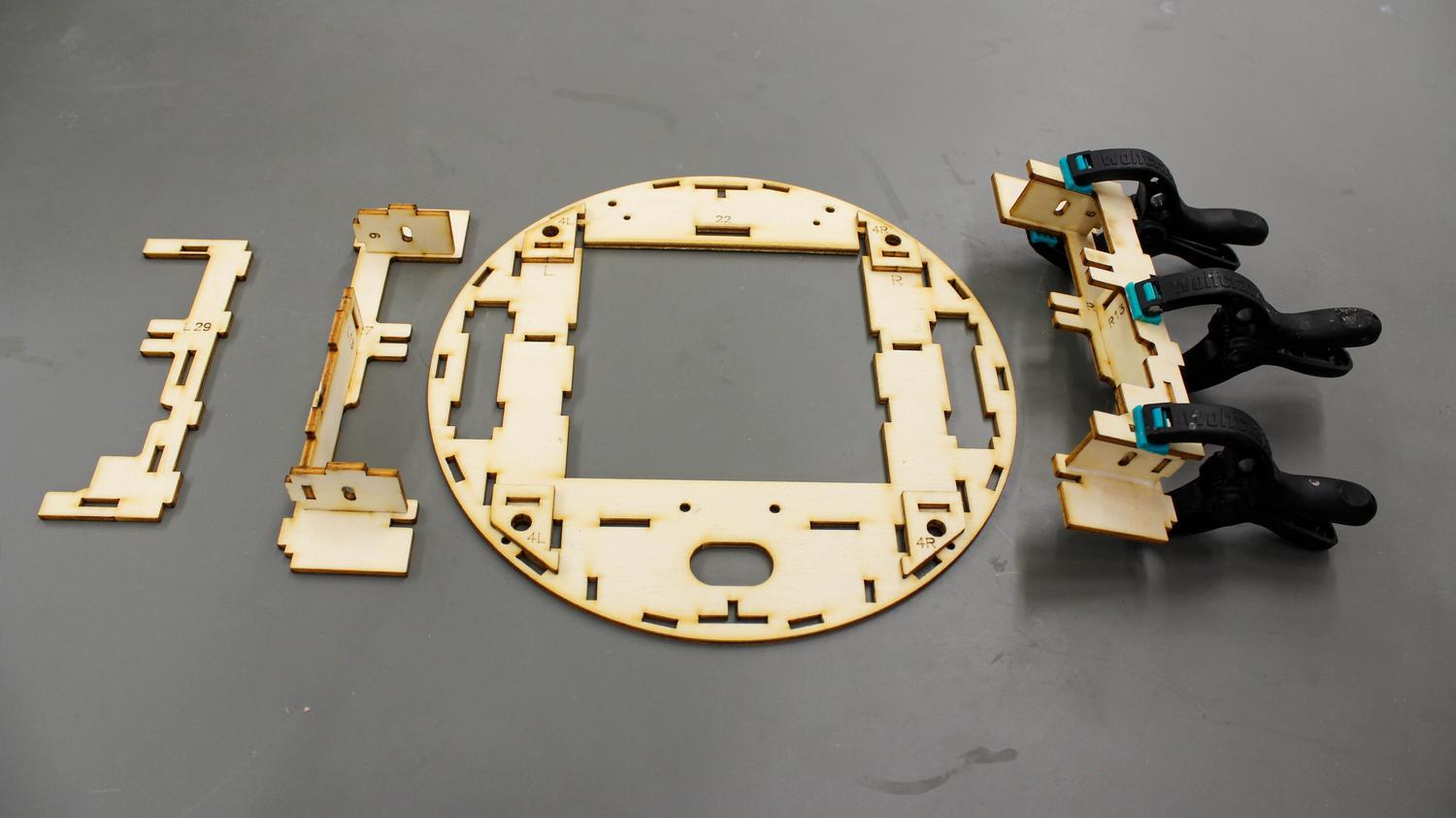
Stejným způsobem uděláme i druhou stranu (stále nic nelepíme)
19
20
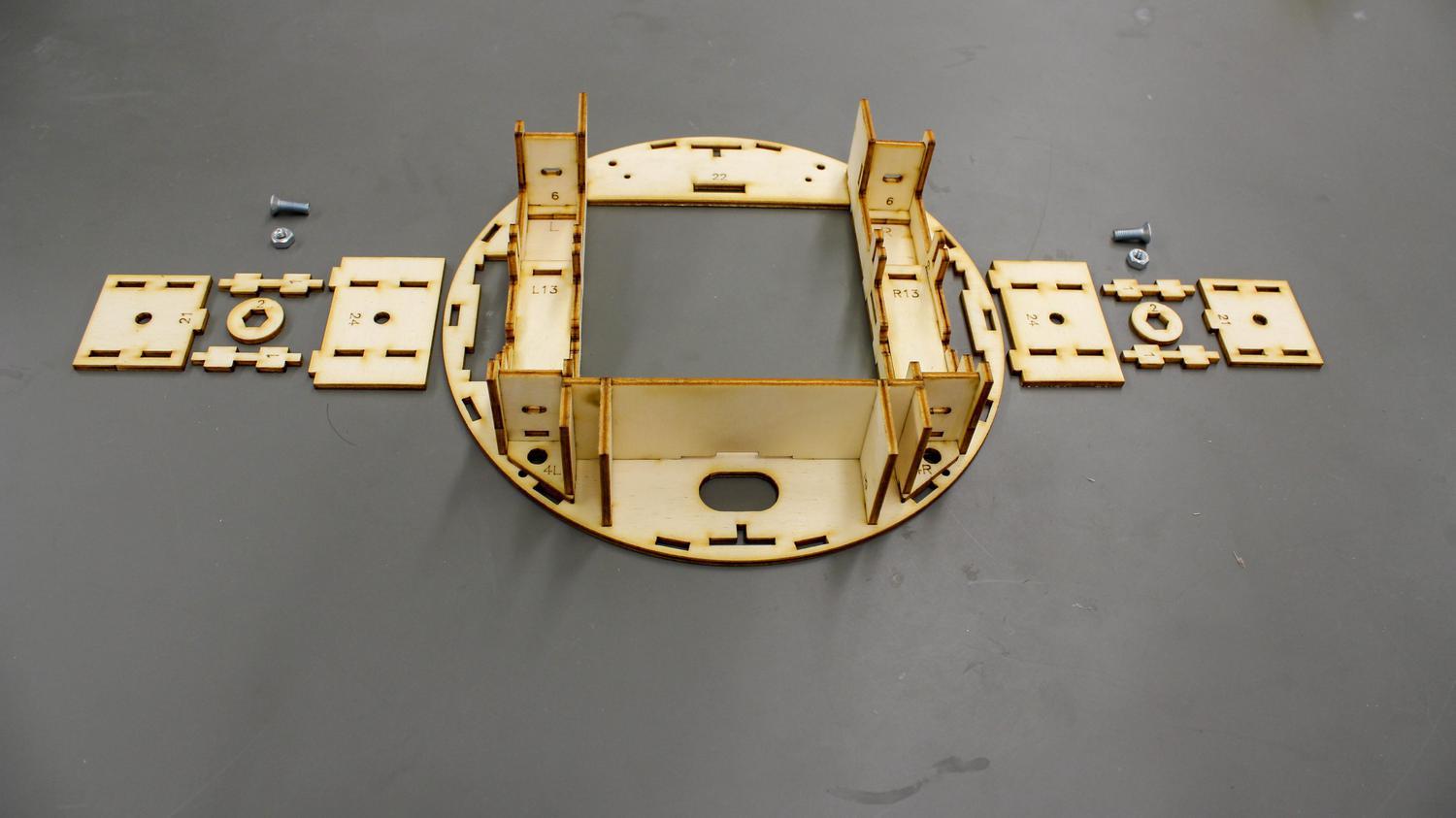
21
22
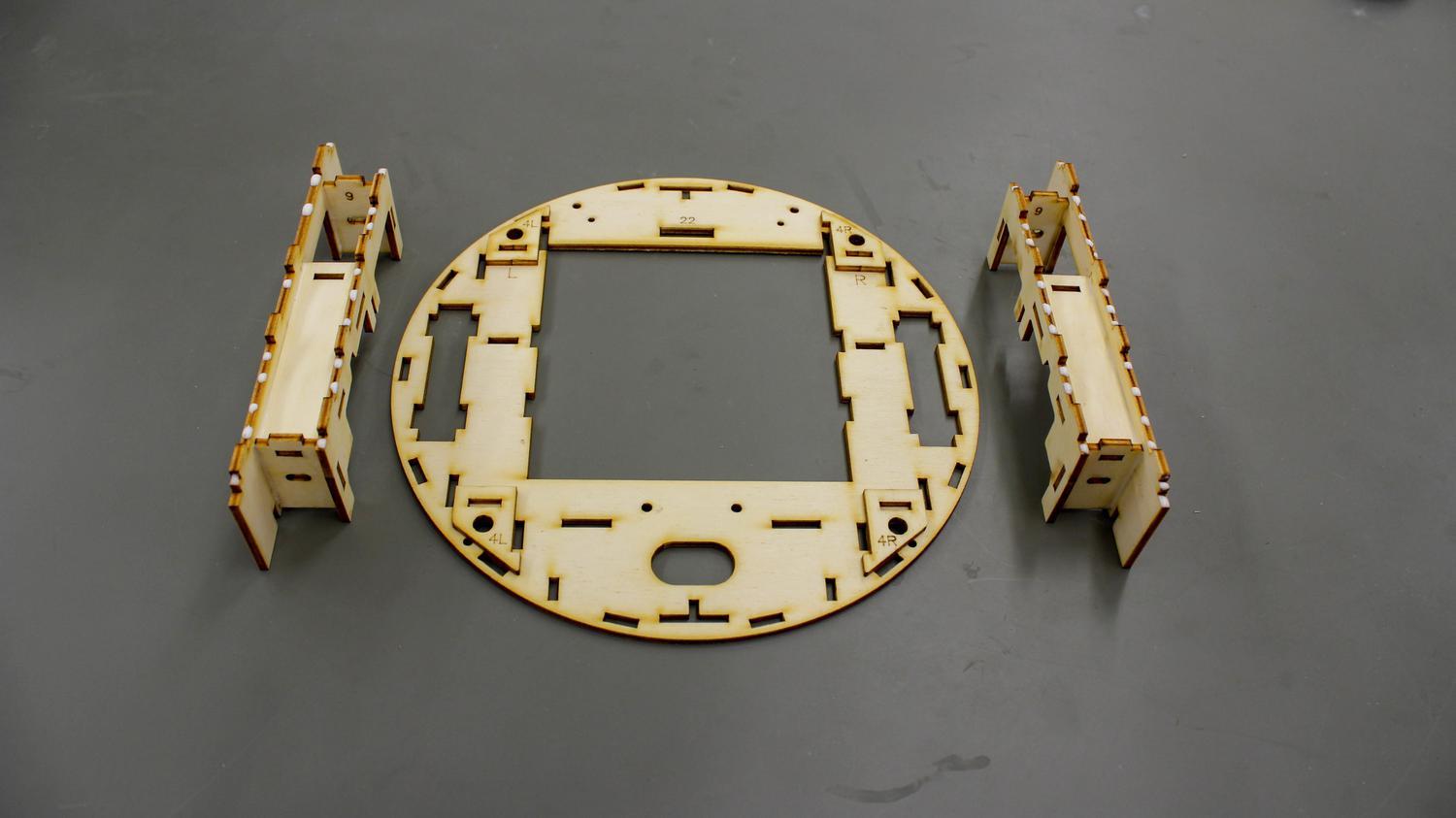
23
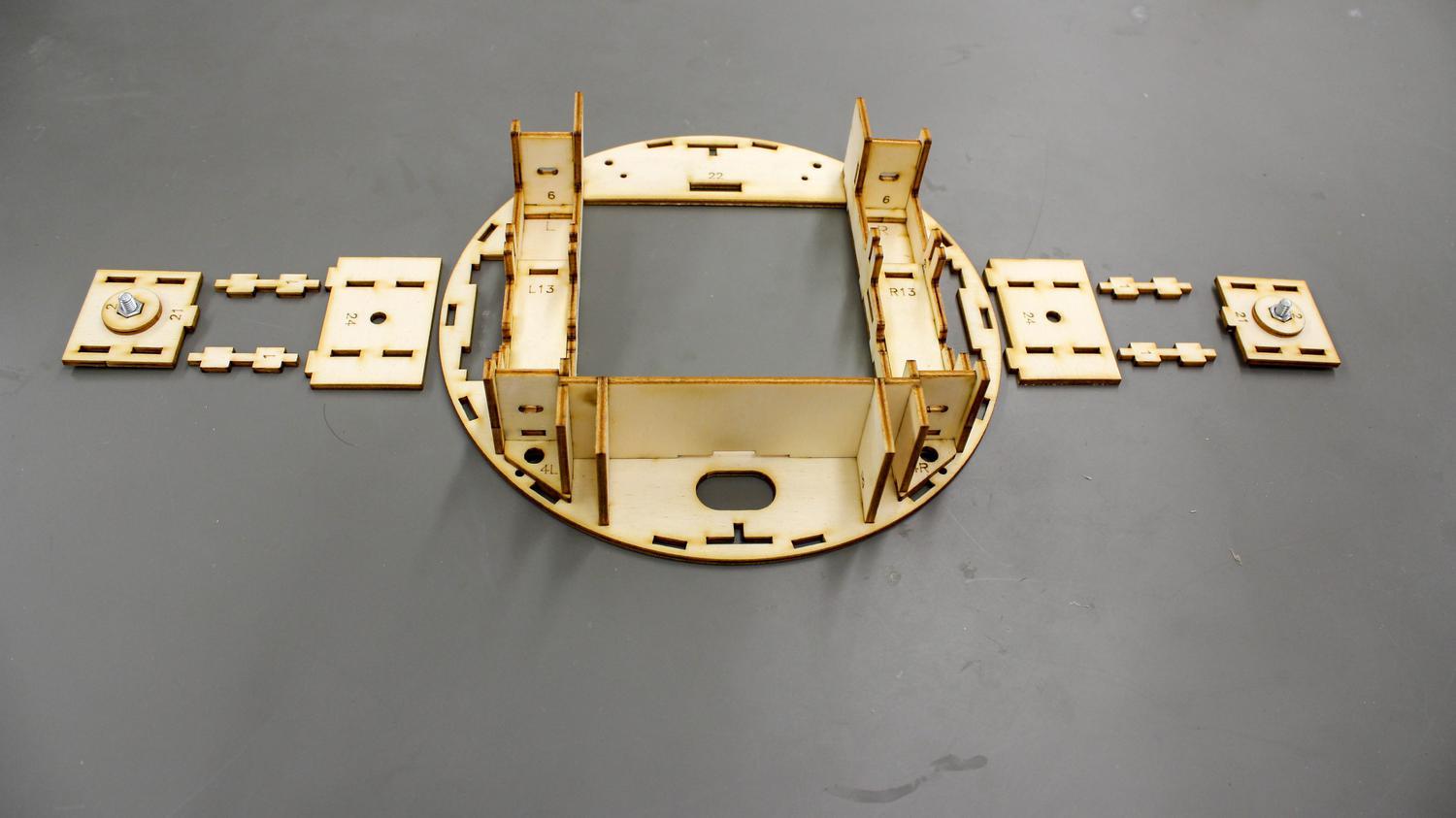
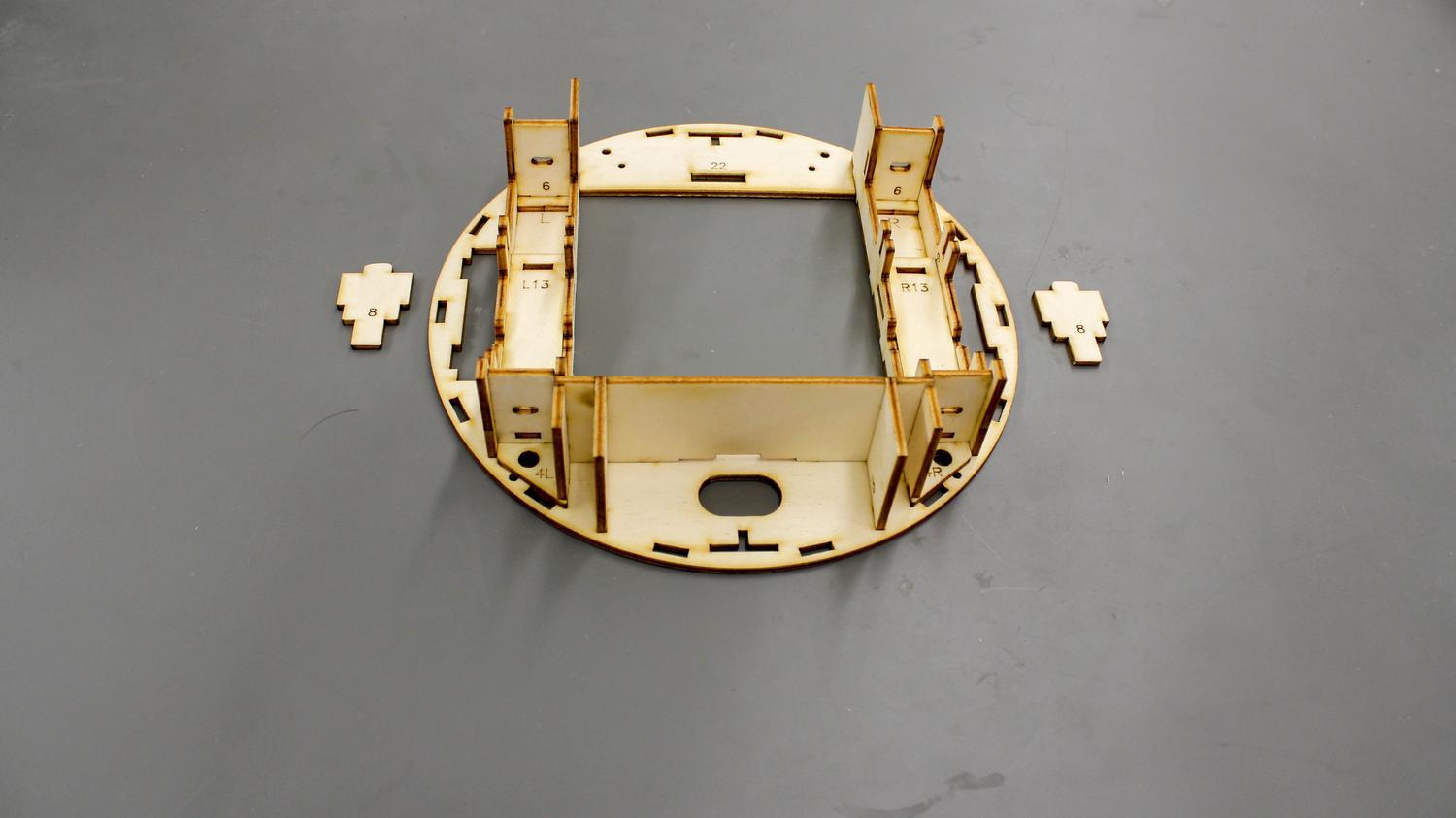
Přilepte oba dílky k palubě
24

25
26
27
28
29
30

31
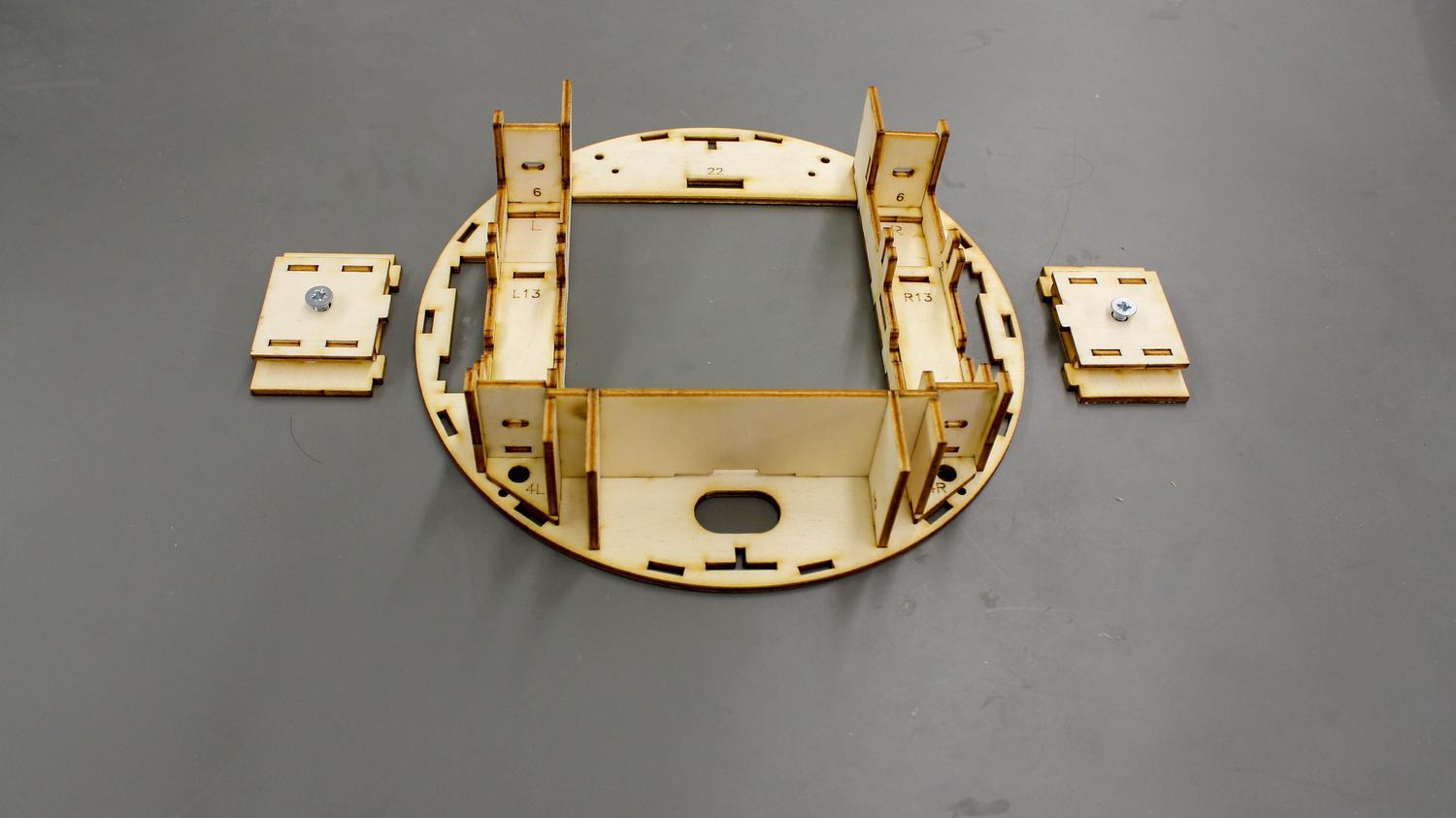
Do dílku 21 vložte šroub M5x 14 a přišroubujte k němu matici M5
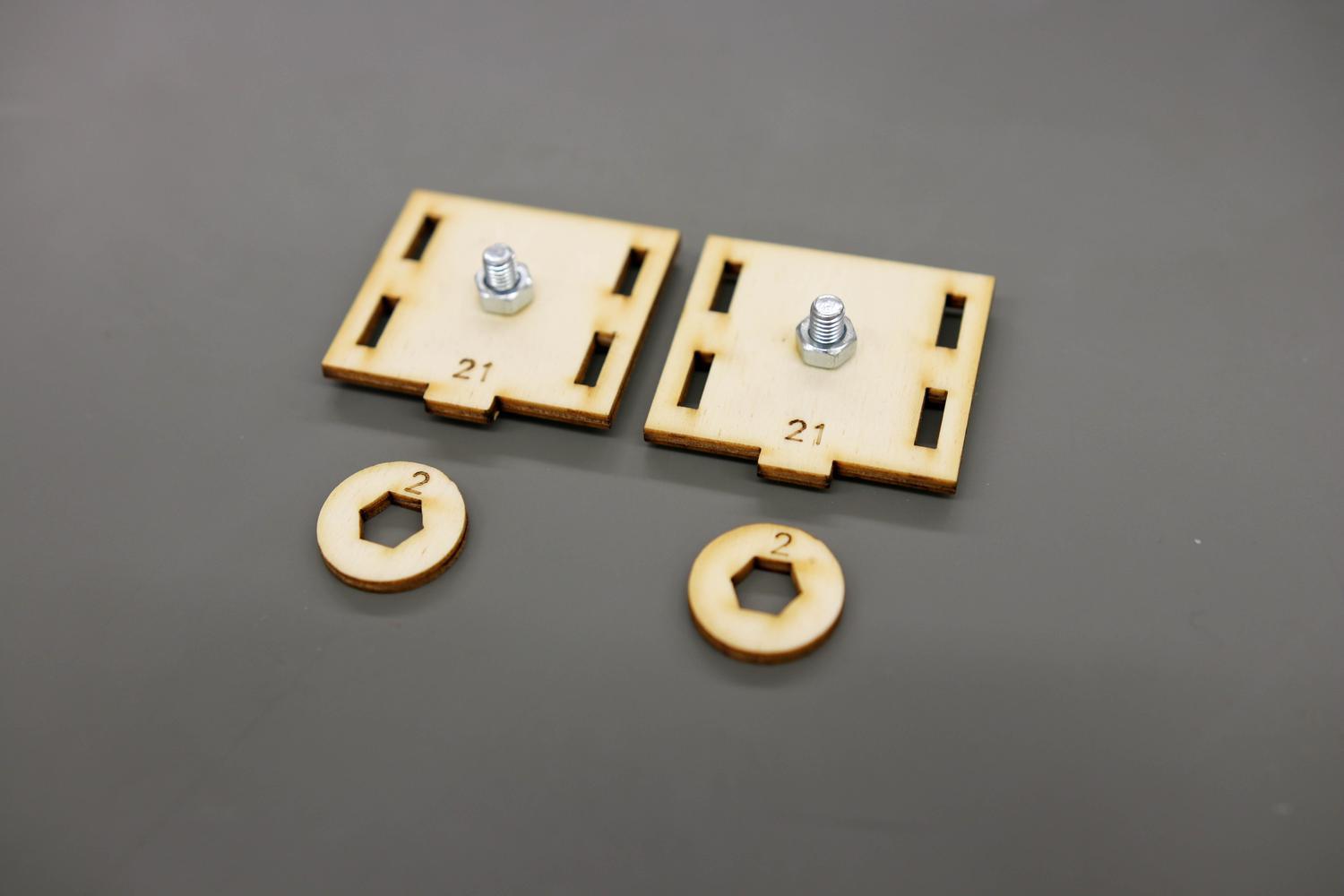
32
33
34

35
Vedoucí ti s tím pomůže
36
37

38
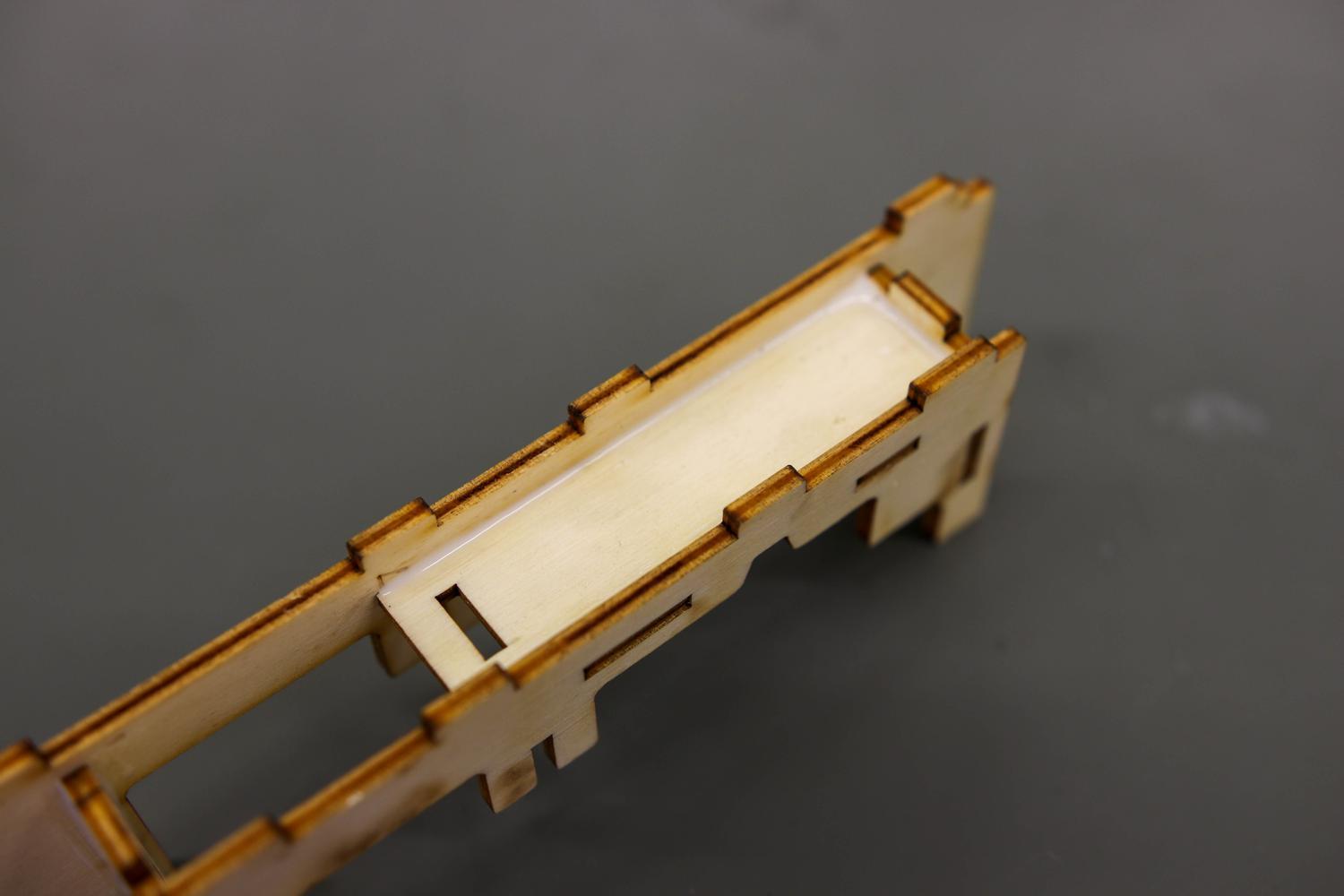
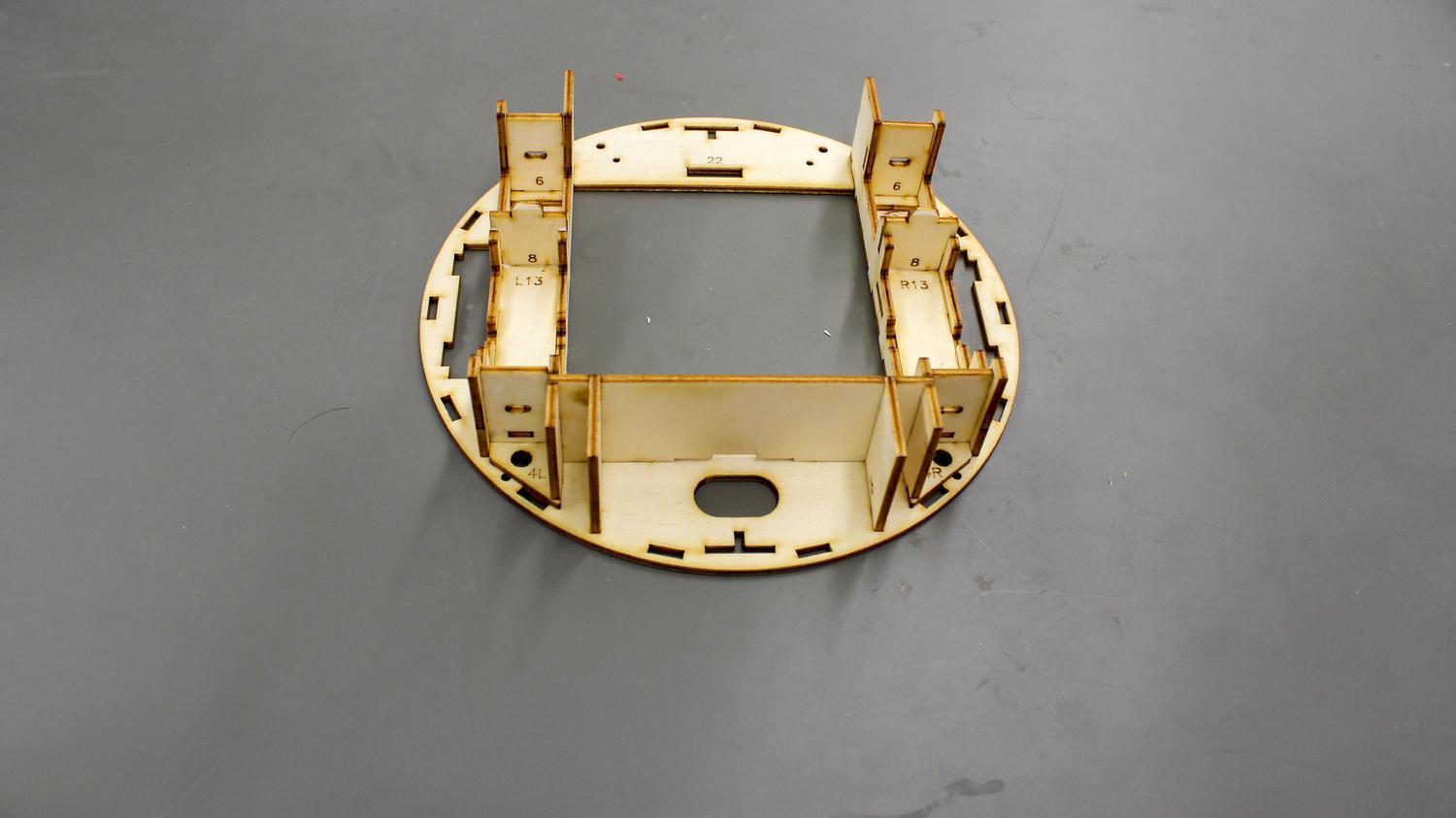
Dílky zbrousíme, aby nám šla paluba lépe nasadit
39
40
41
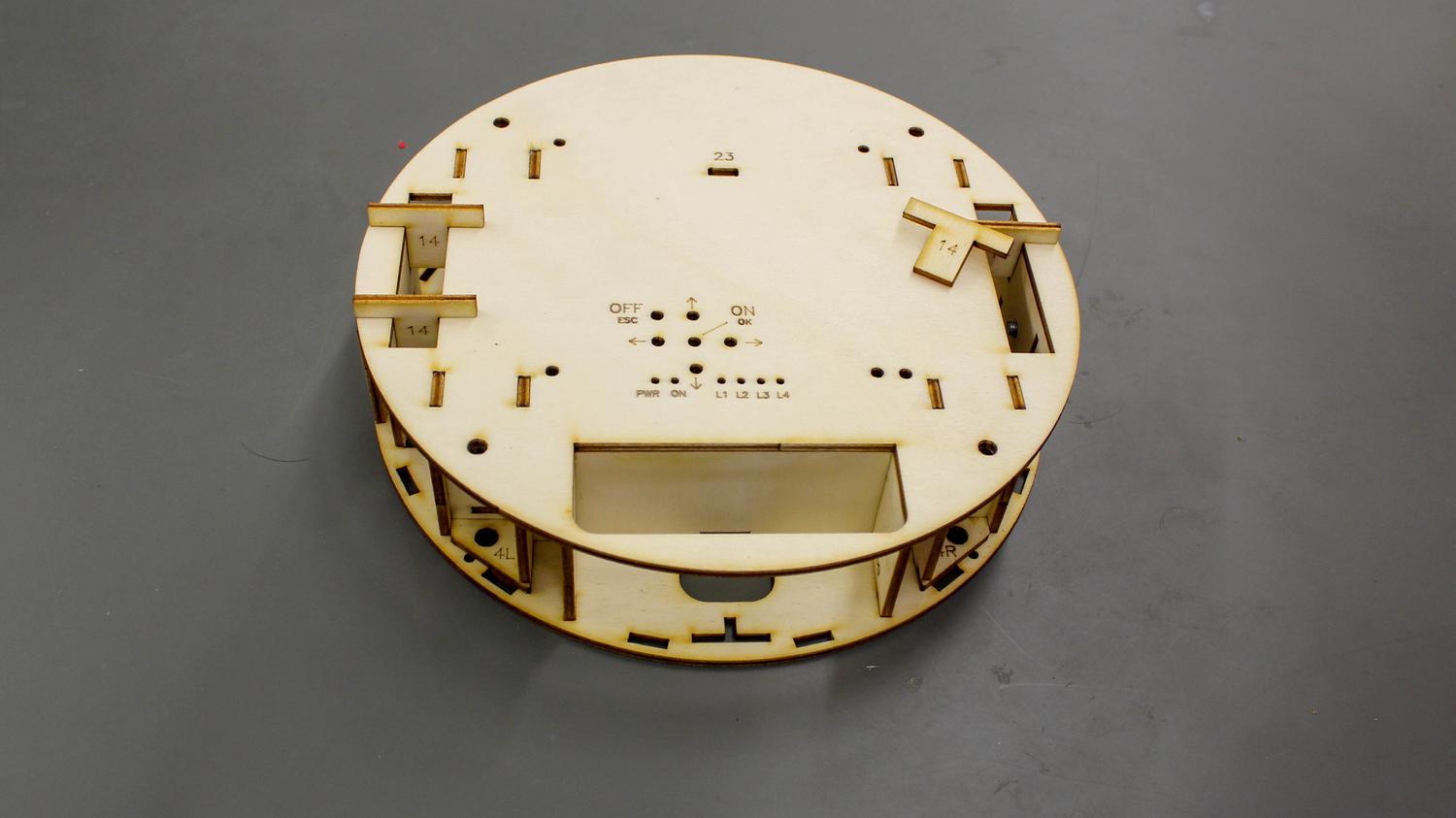
42
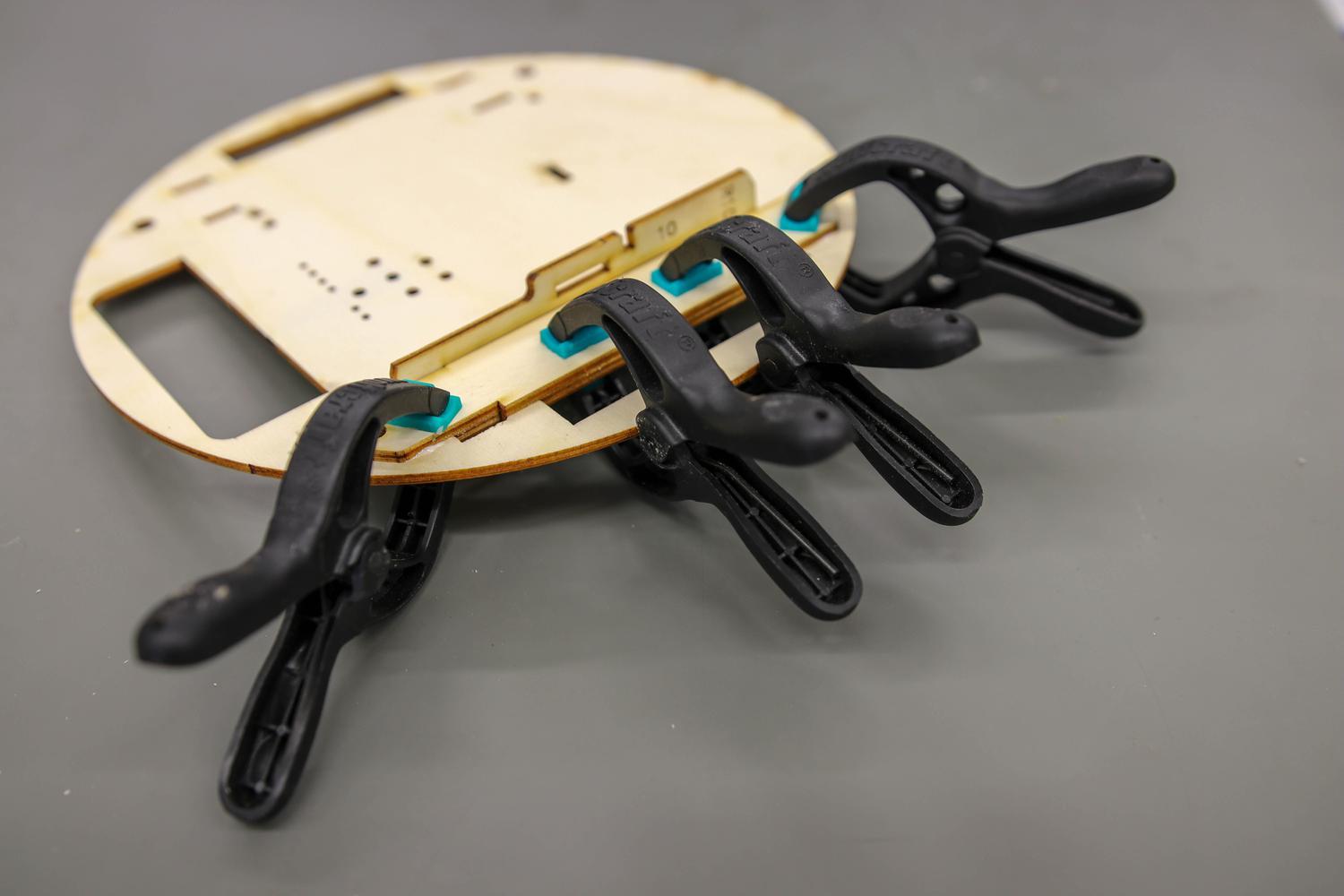
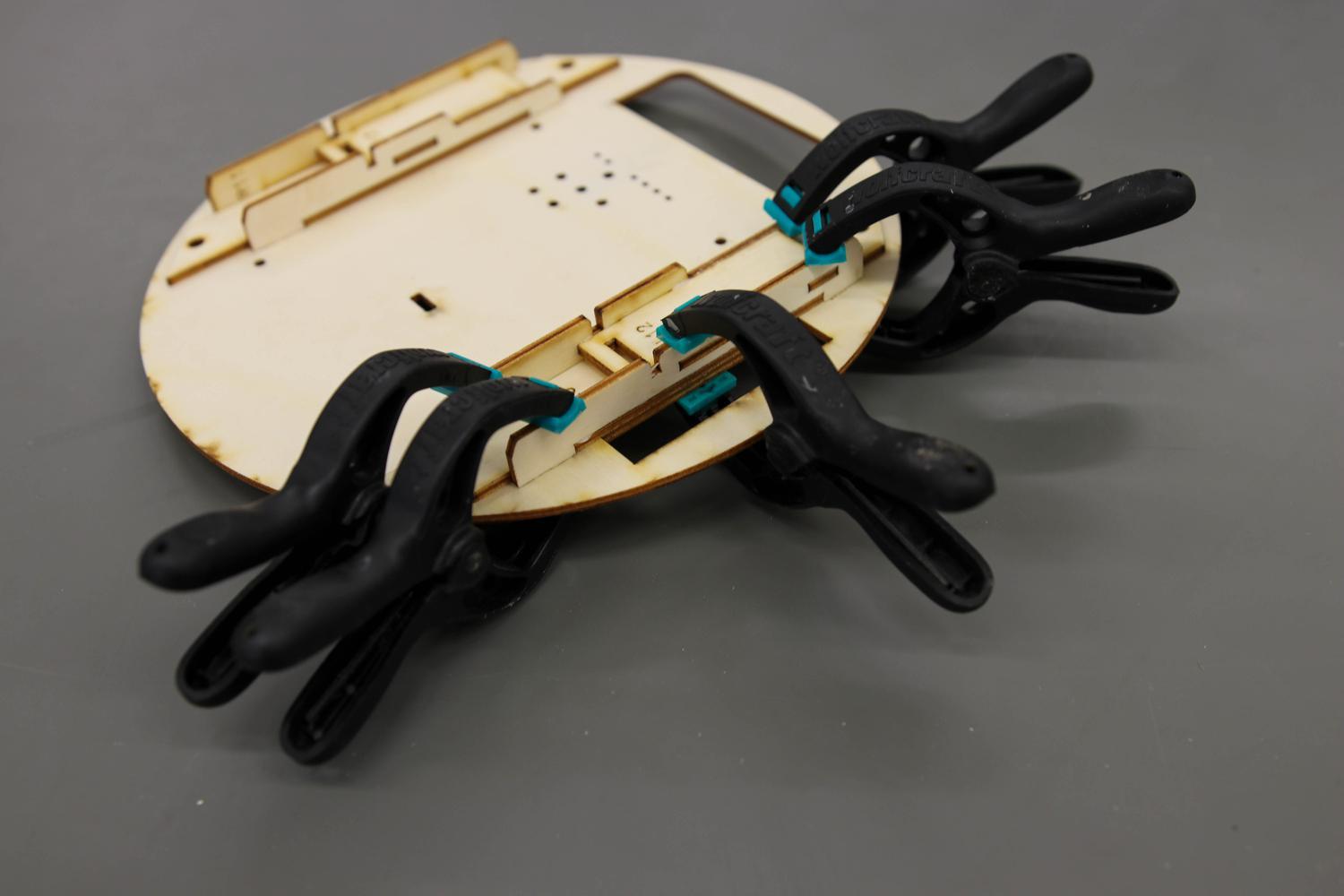
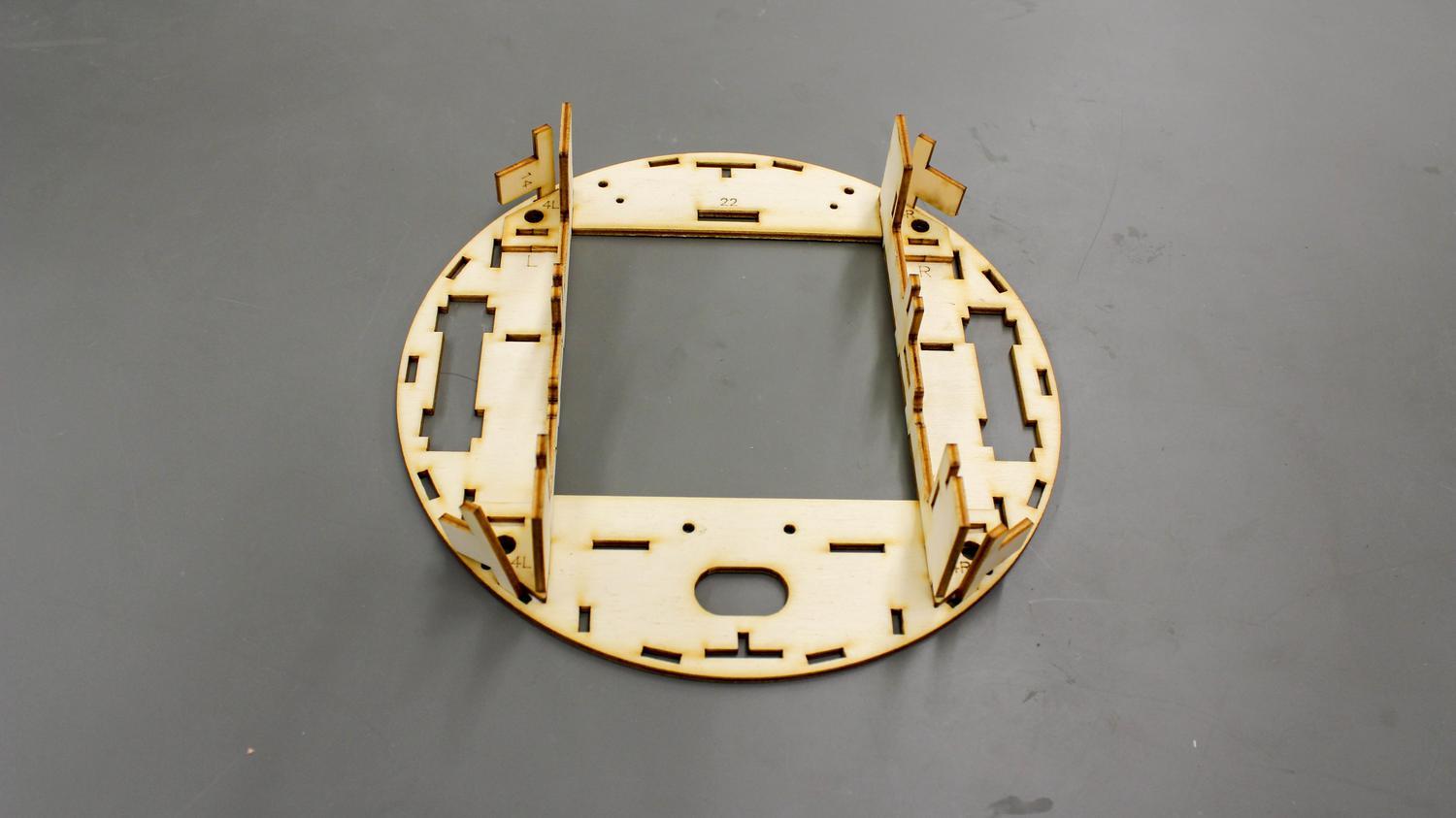
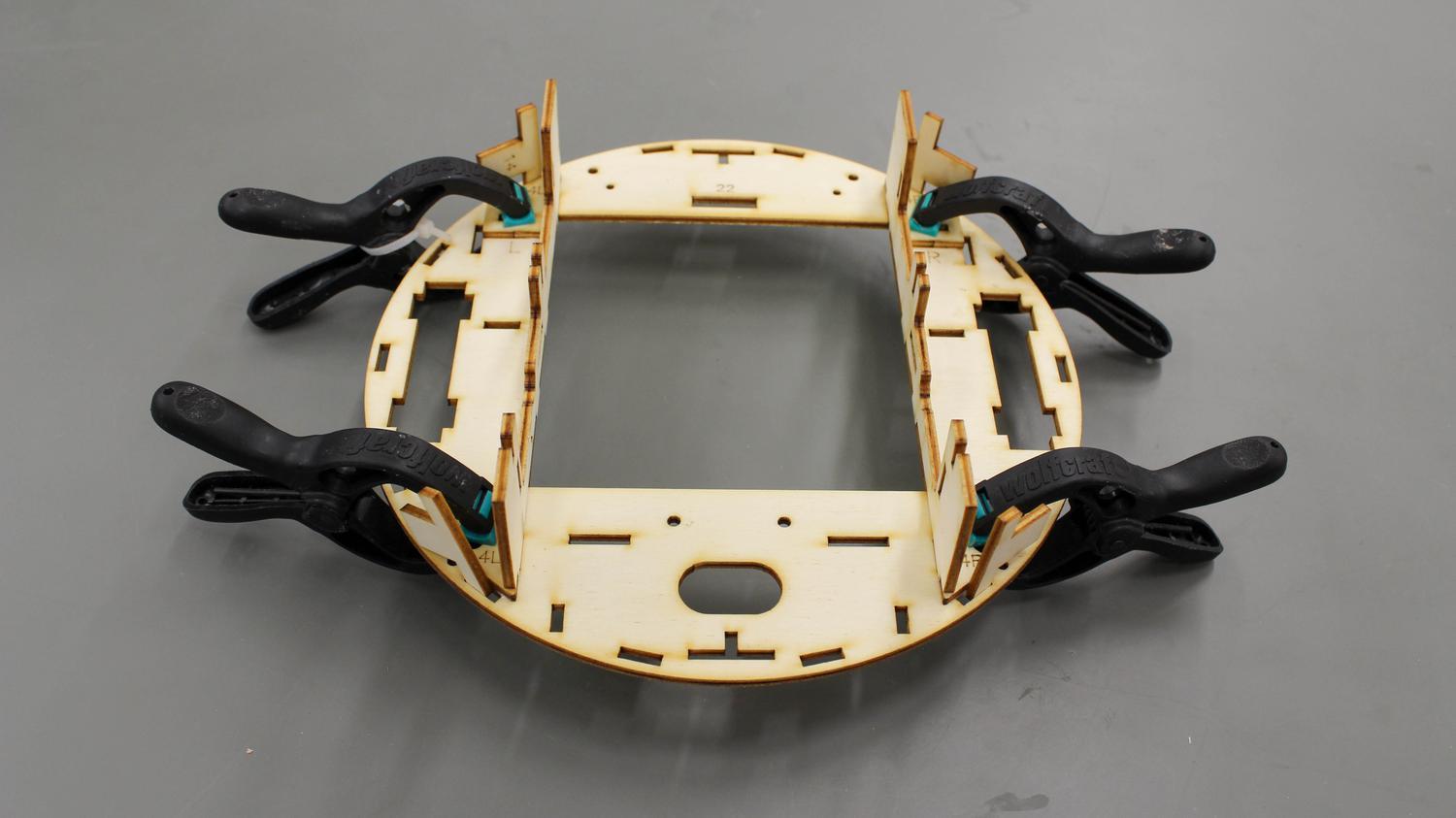
Na podvozek přiklopíme palubu a pomocí dílků 14 srovnáme boční sloupky a necháme zaschnout
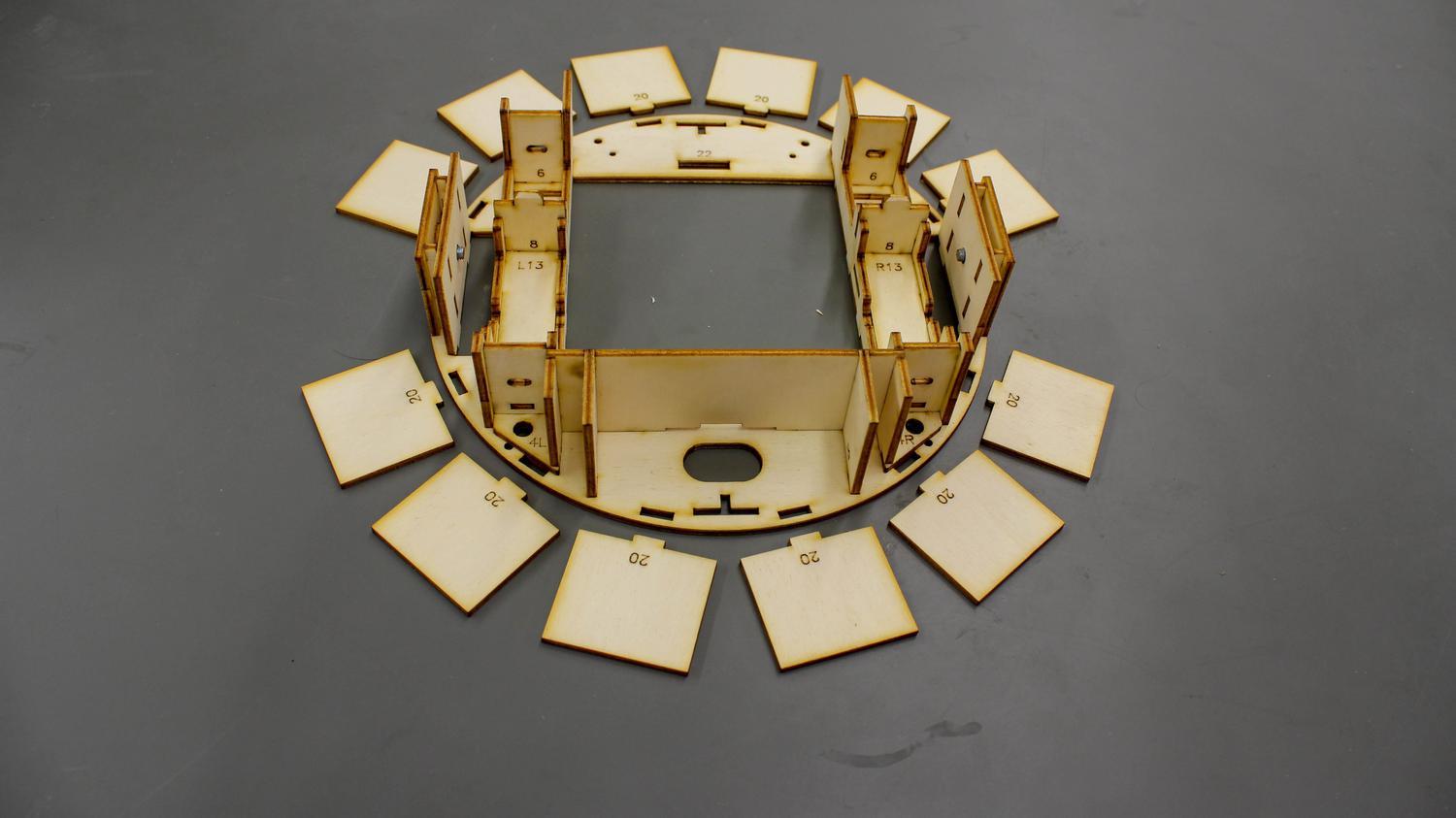
43
Dílky lepíme ke spodní překližce
44
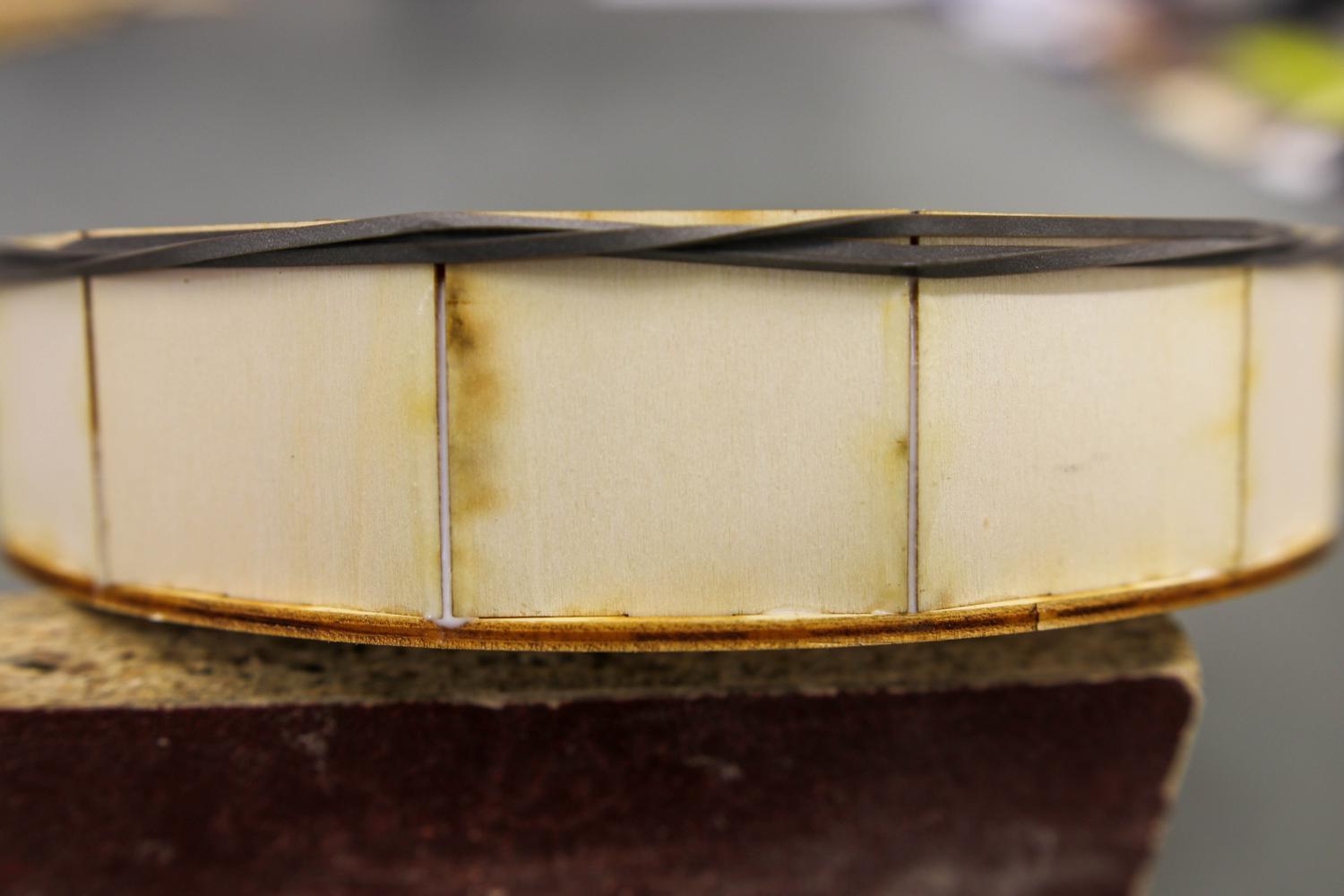
Na palubu nasadíme gumičku případně provázek a všechny spoje zalepíme koutovým spojem
45

46

47
48
Dílek přilepte i na druhou stranu robota
49
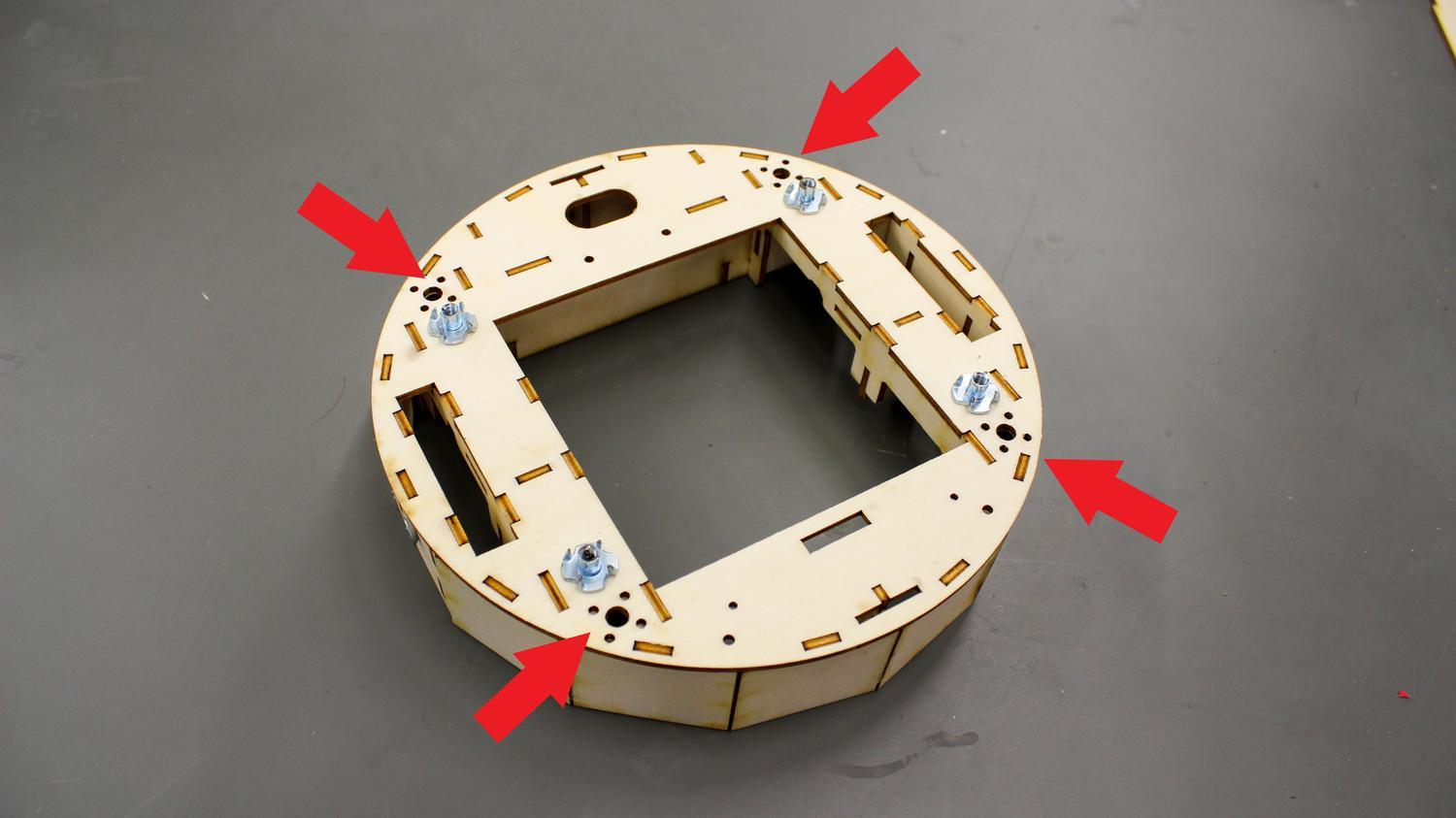
Pod naklepávací matky kápněte vteřiňák a nasaďte je

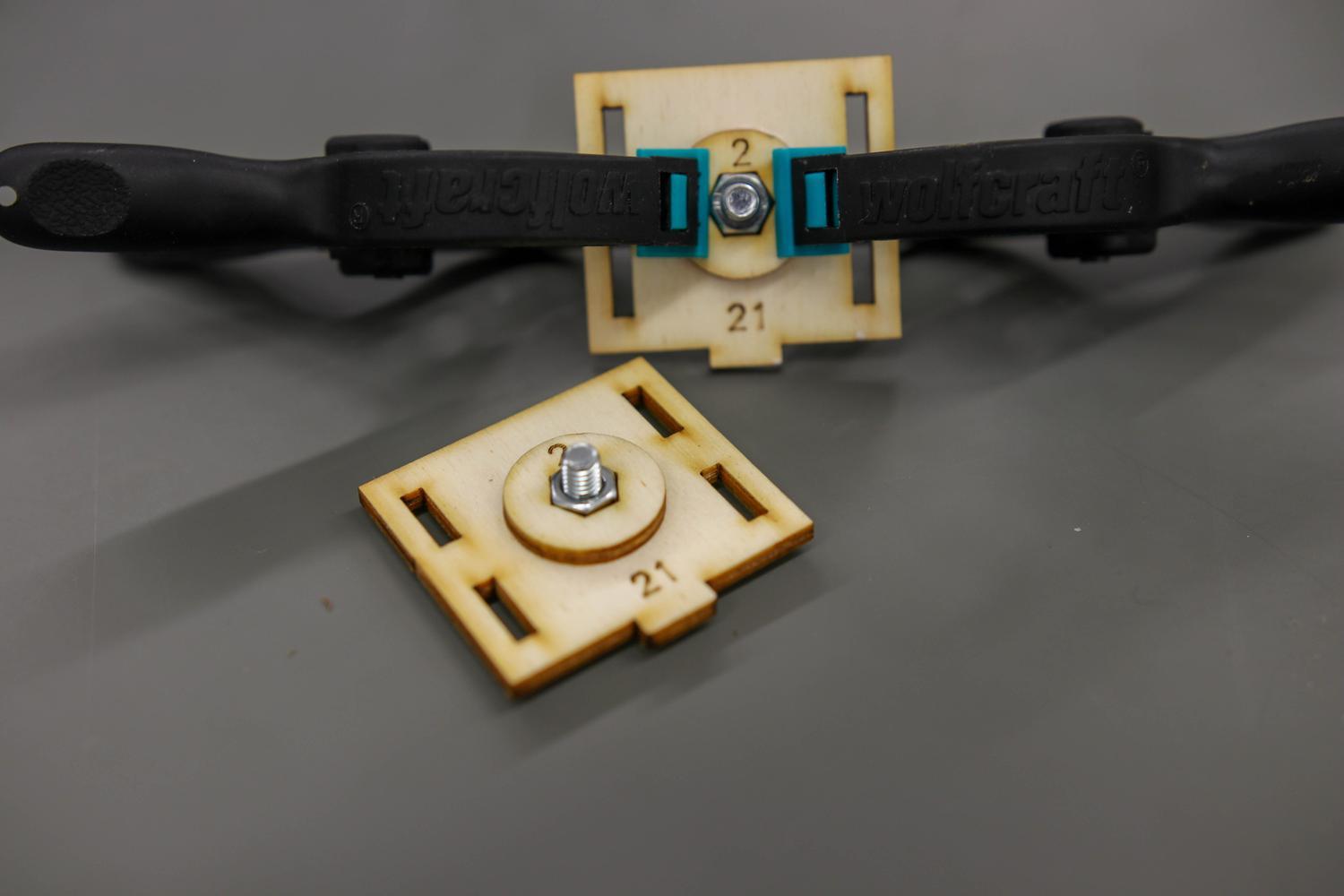
50
Všechny matky je potřeba zalisovat ve svěráku

51

52

53
54
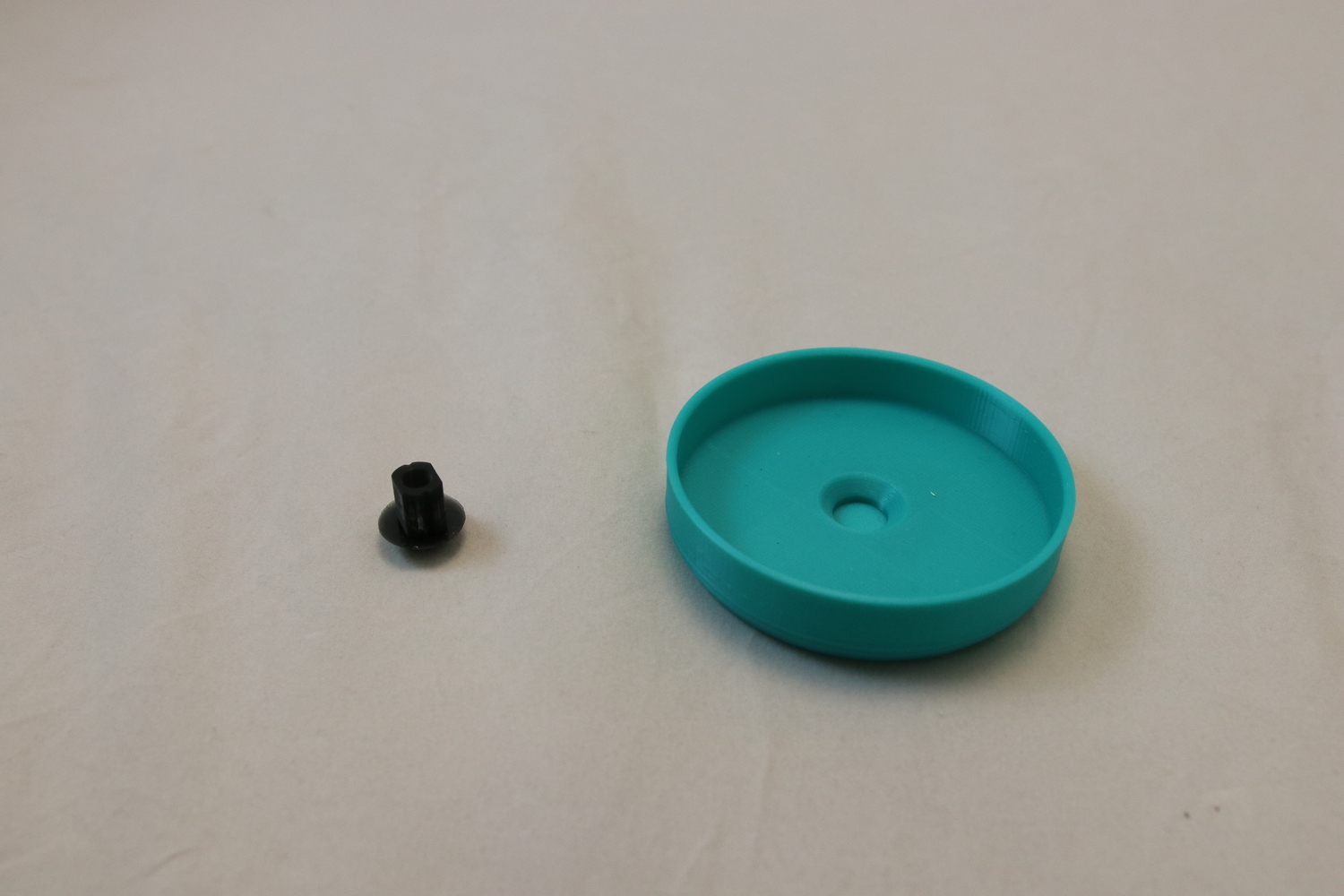
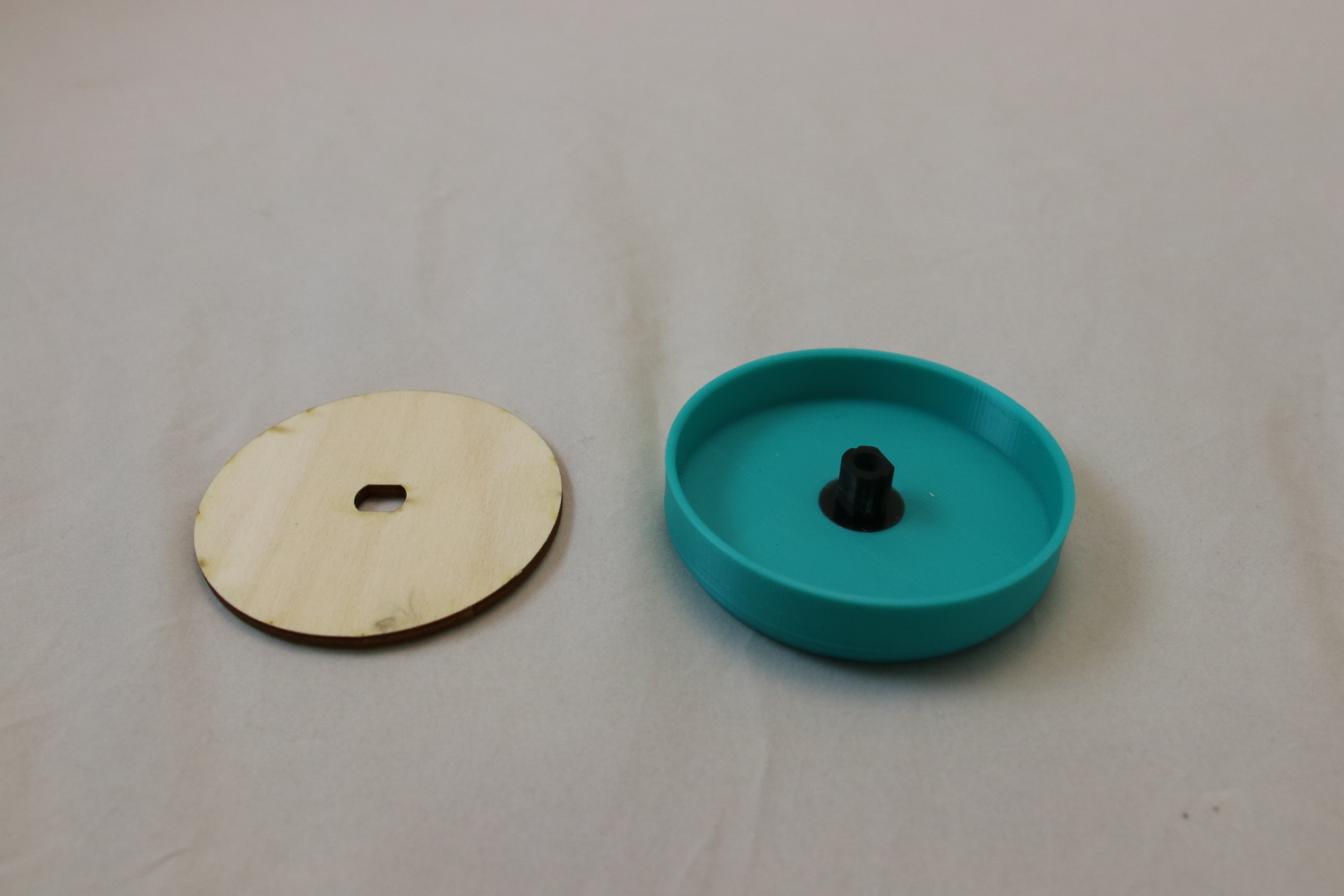
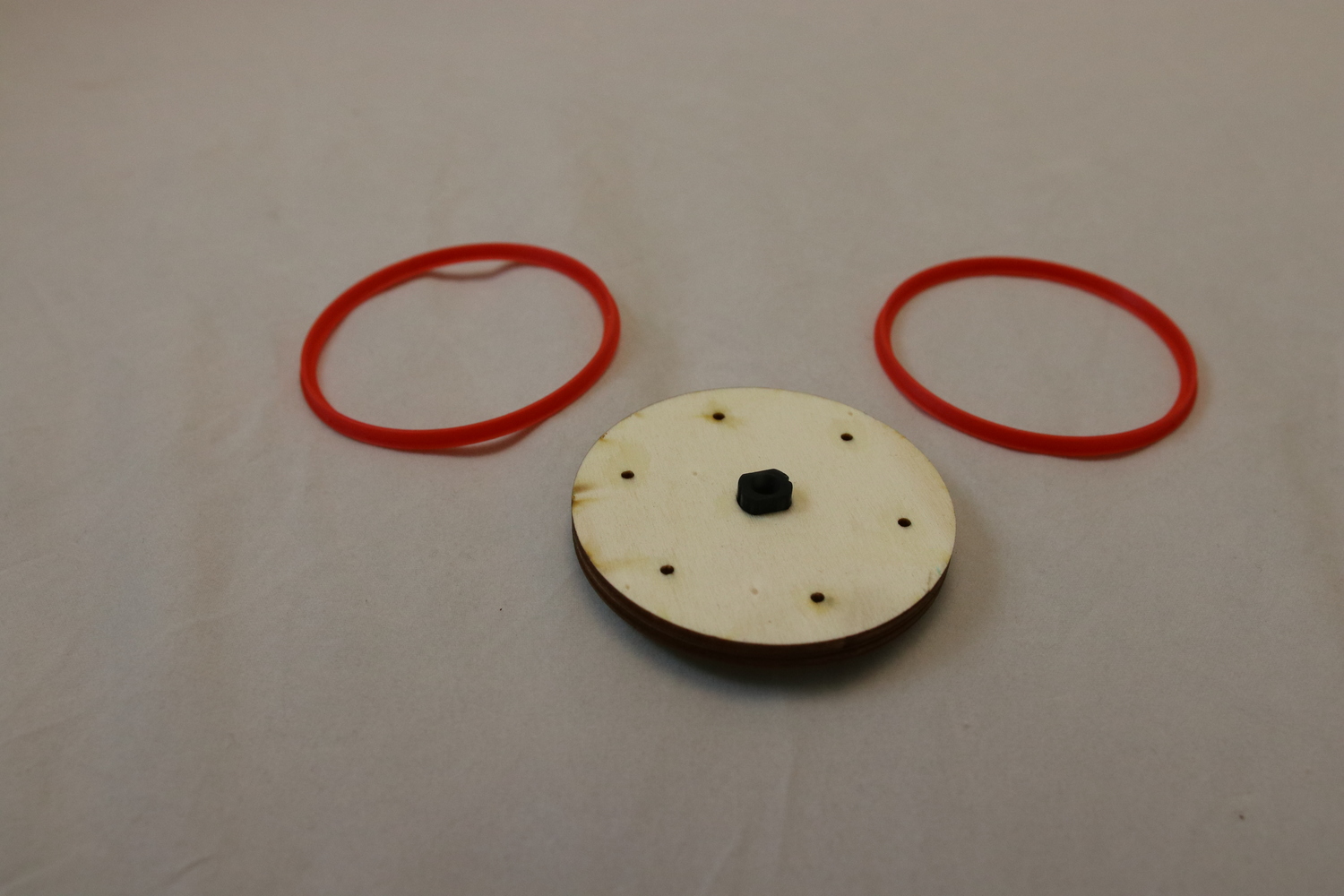
Kolečka
1
2
3

4

5
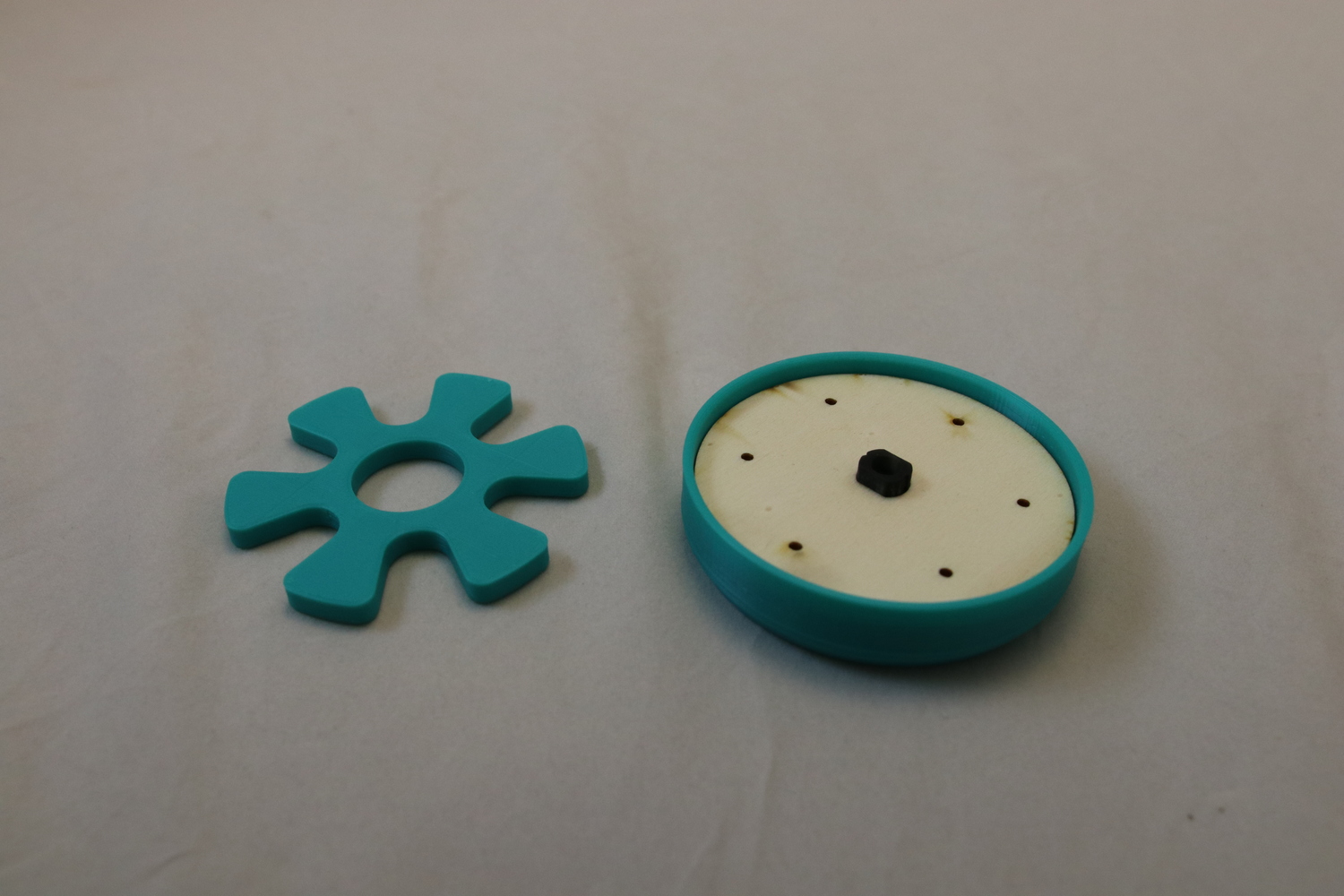
6
7

8
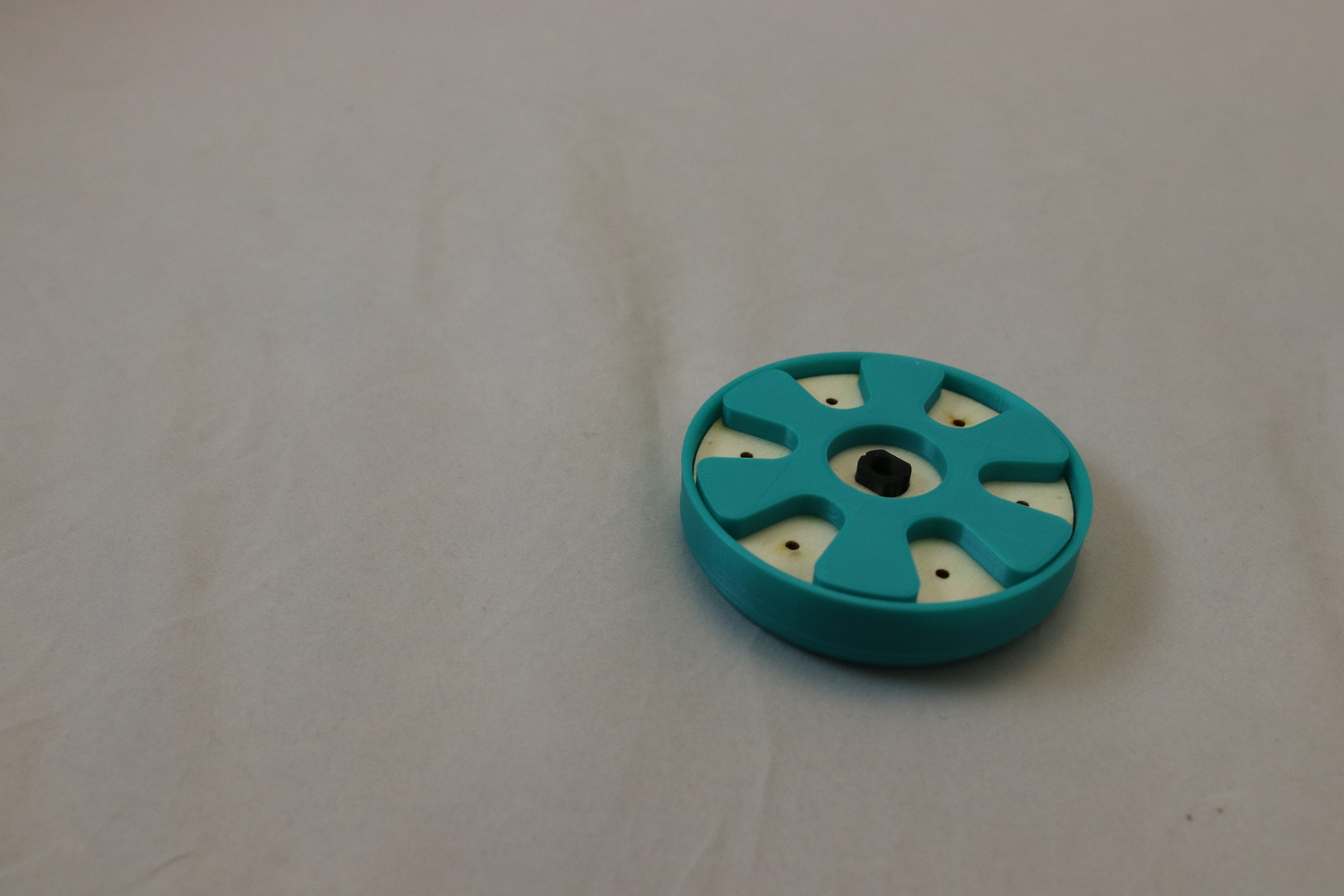
Zatlačte na kolečko pro správné srovnání v přípravku

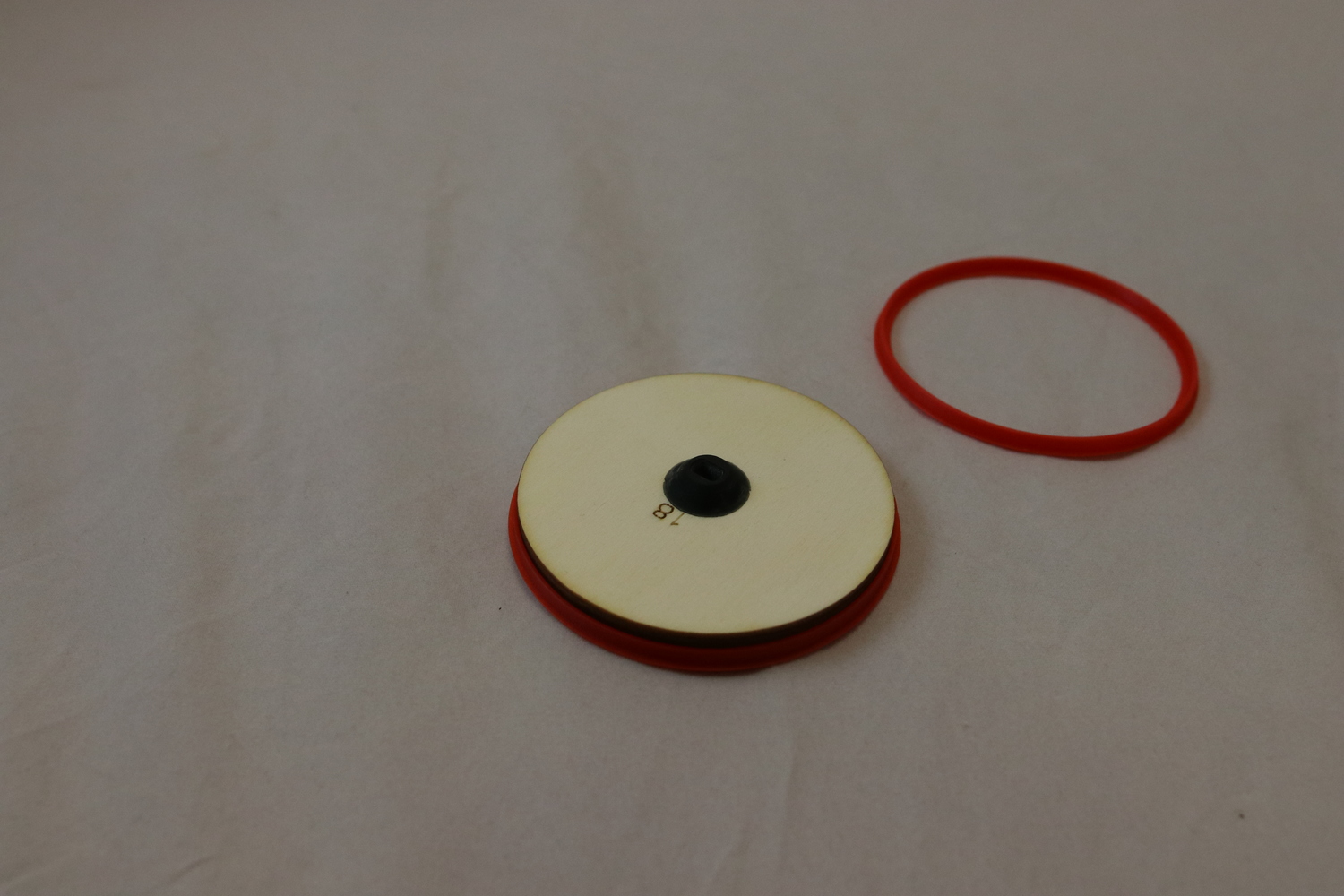
9

10
Do každé dírky kápněte řídký vteřiňák
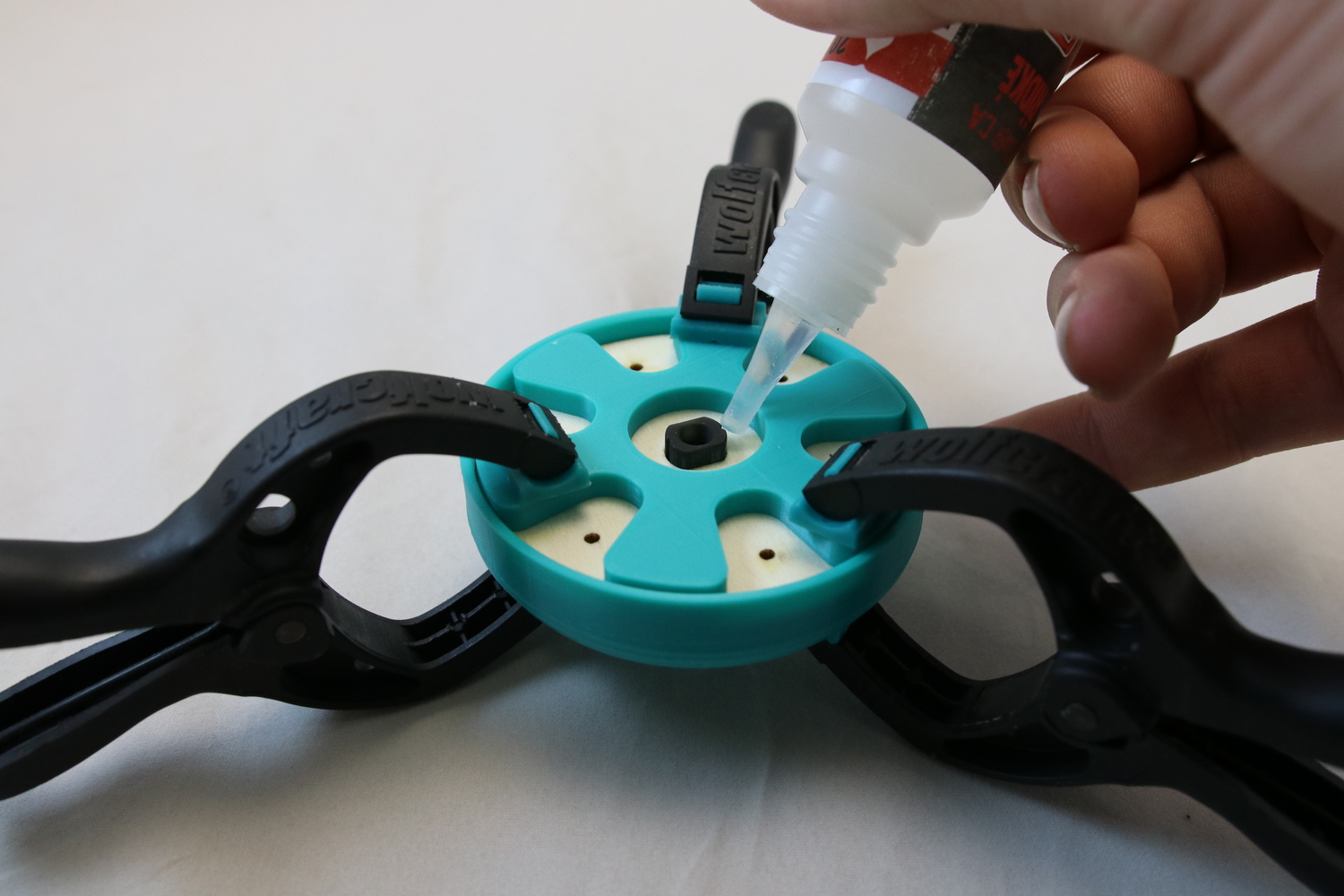
11
Poté kápněte vteřiňák do středového náboje
12
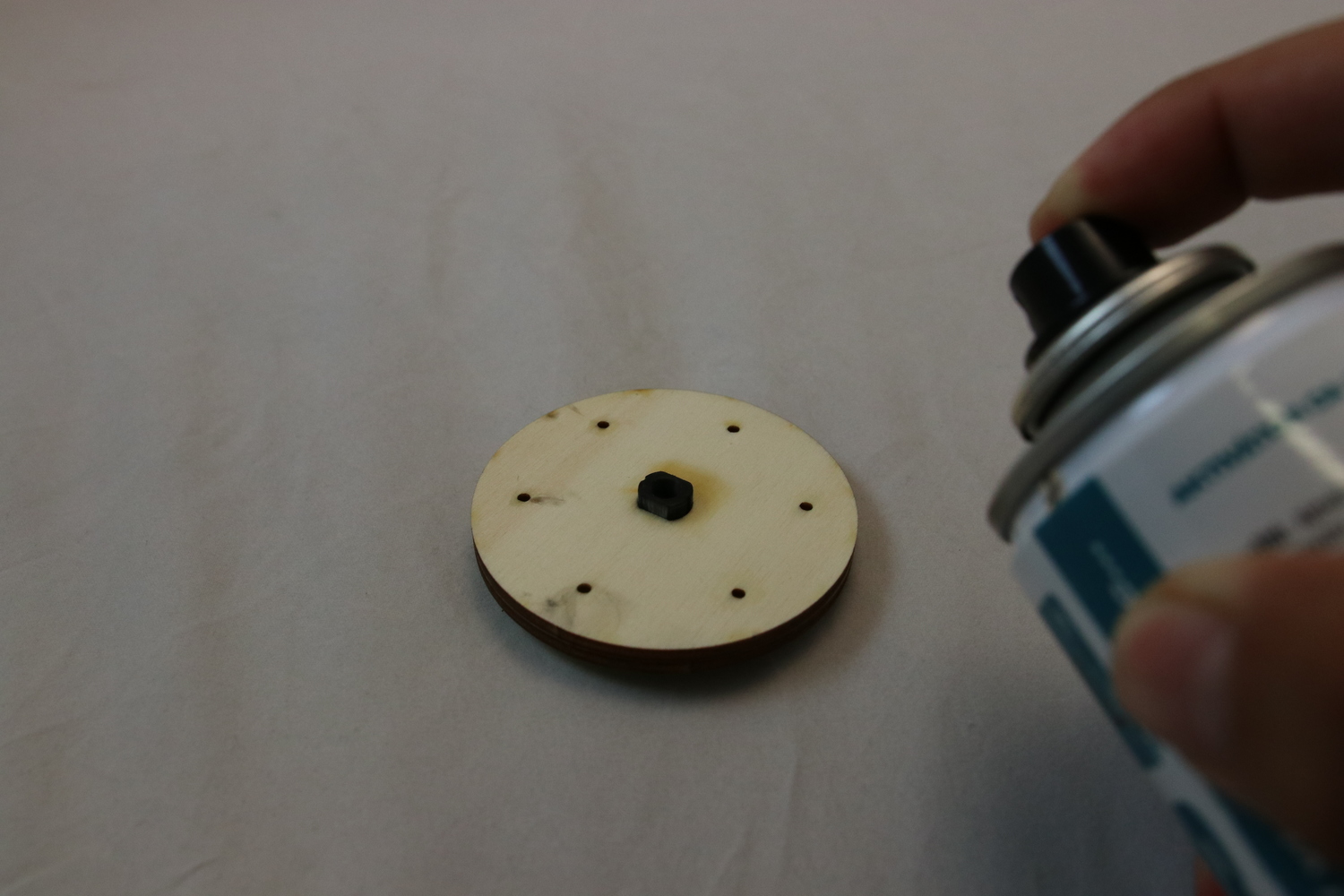
Vytvrďte aktivátorem
13

14
15

16
Slepte vteřiňákem (viz další bod)
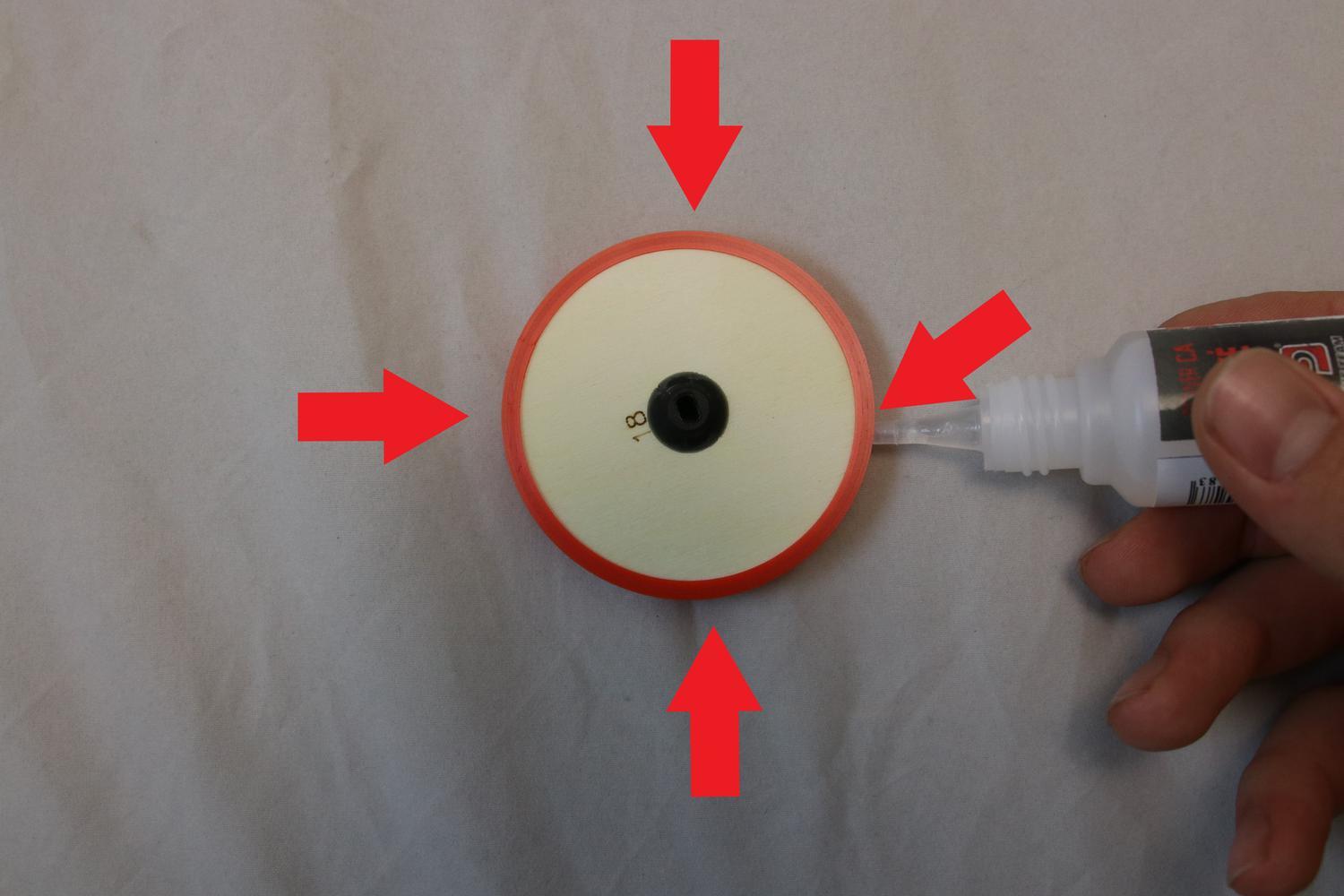
17
Naneste vteřinové lepidlo na místa, kam ukazují šipky

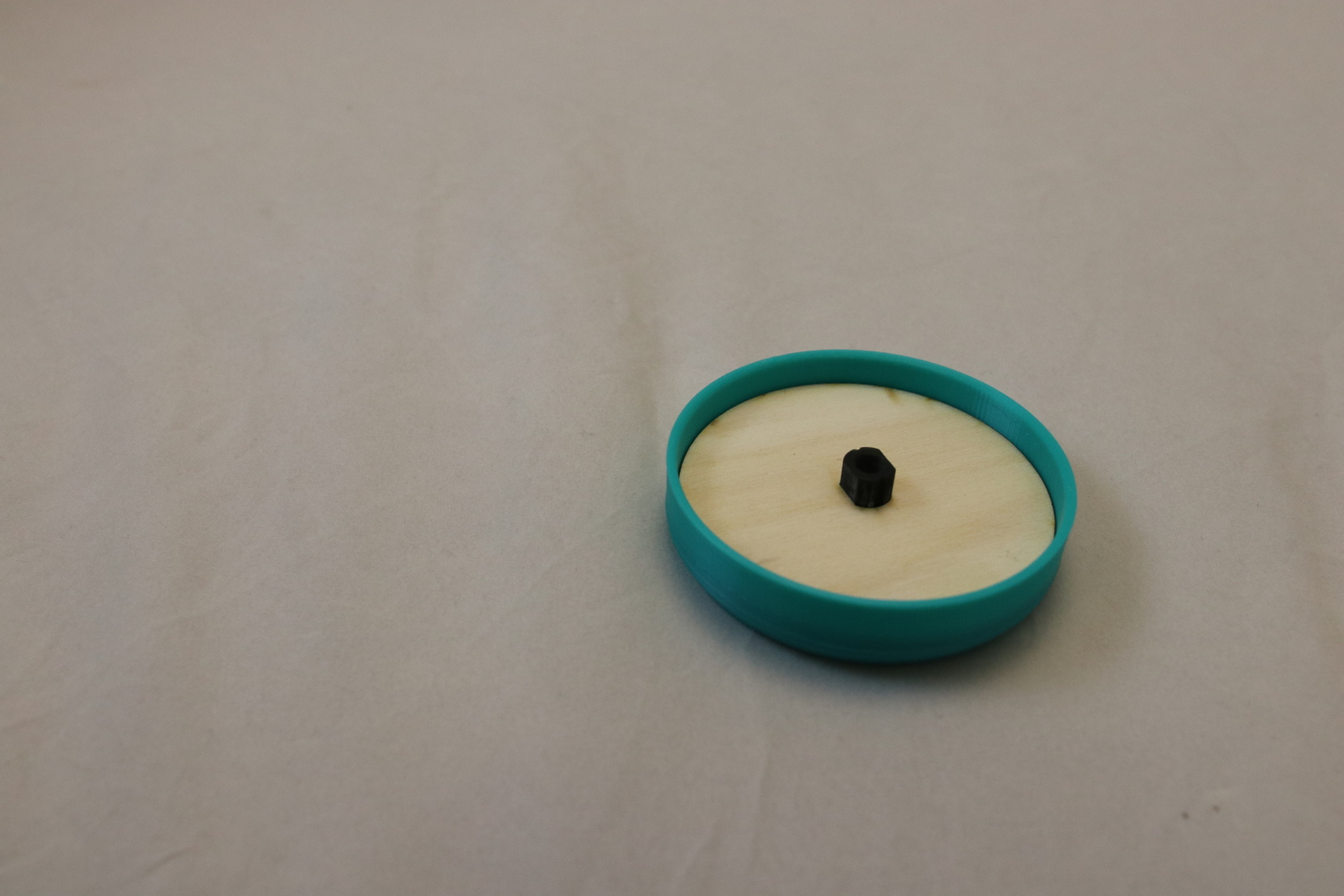
18
Vytvrďte aktivátorem
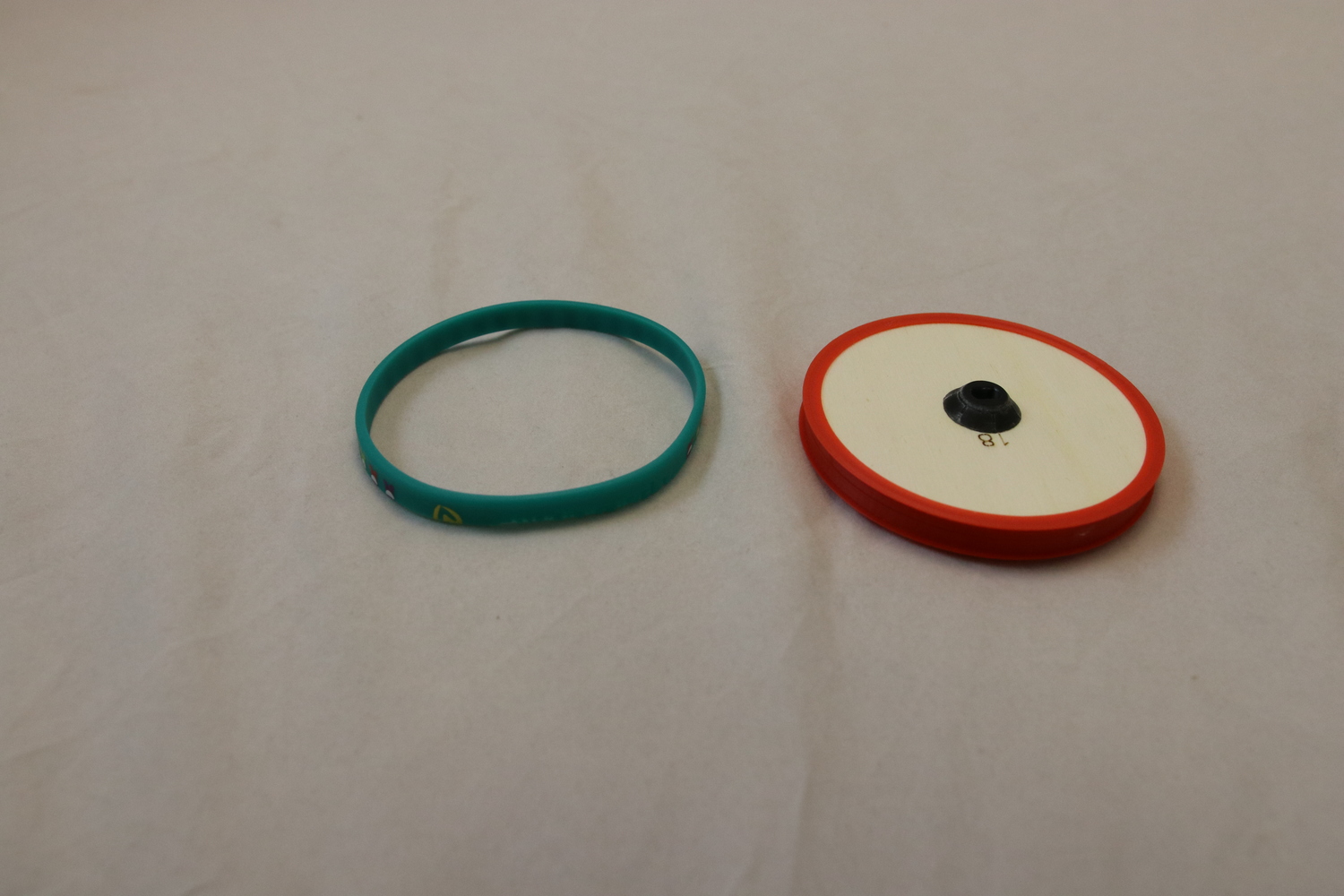
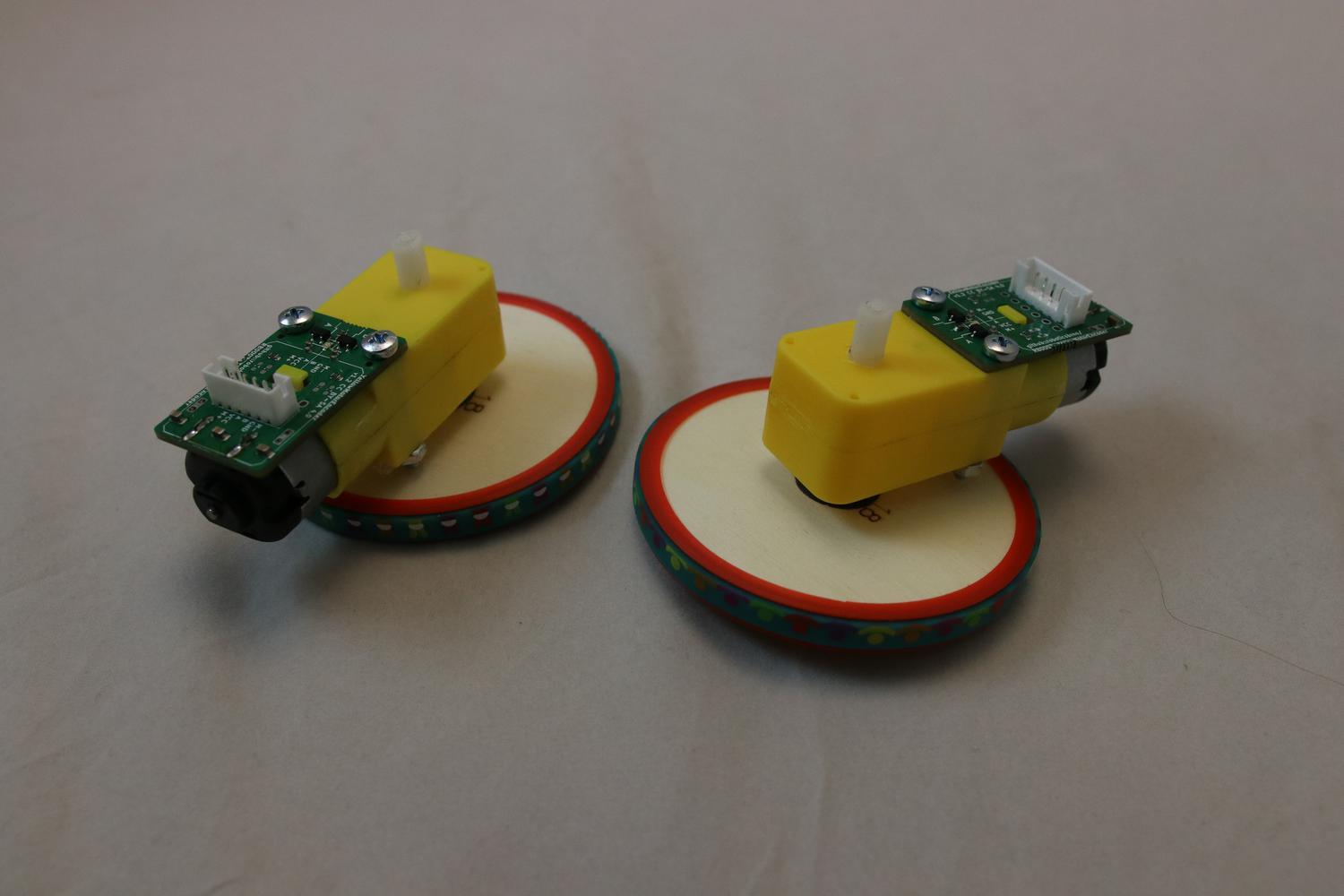
19
20
Proces opakujte znovu a vyrobte druhé kolečko
Motory

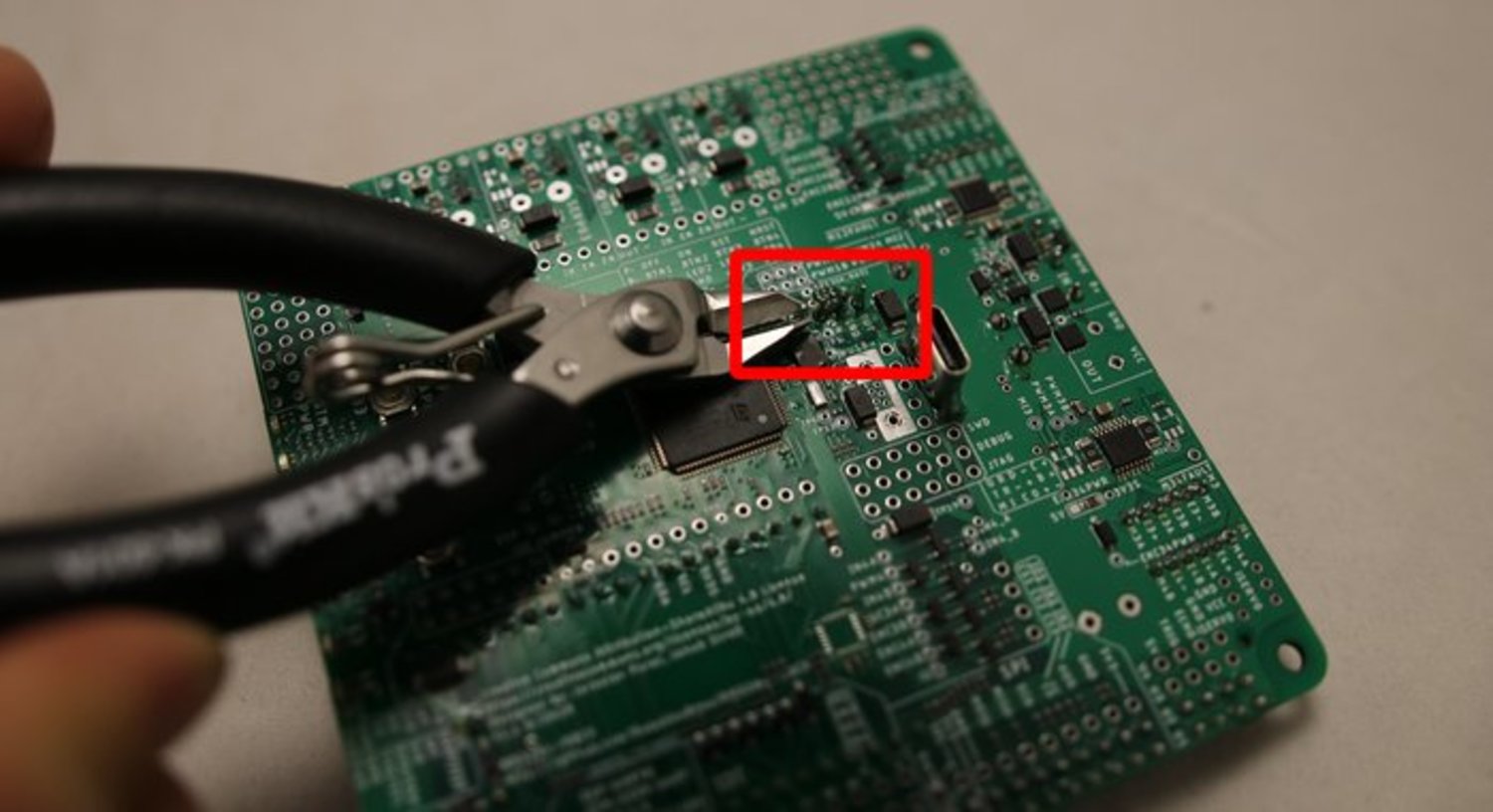
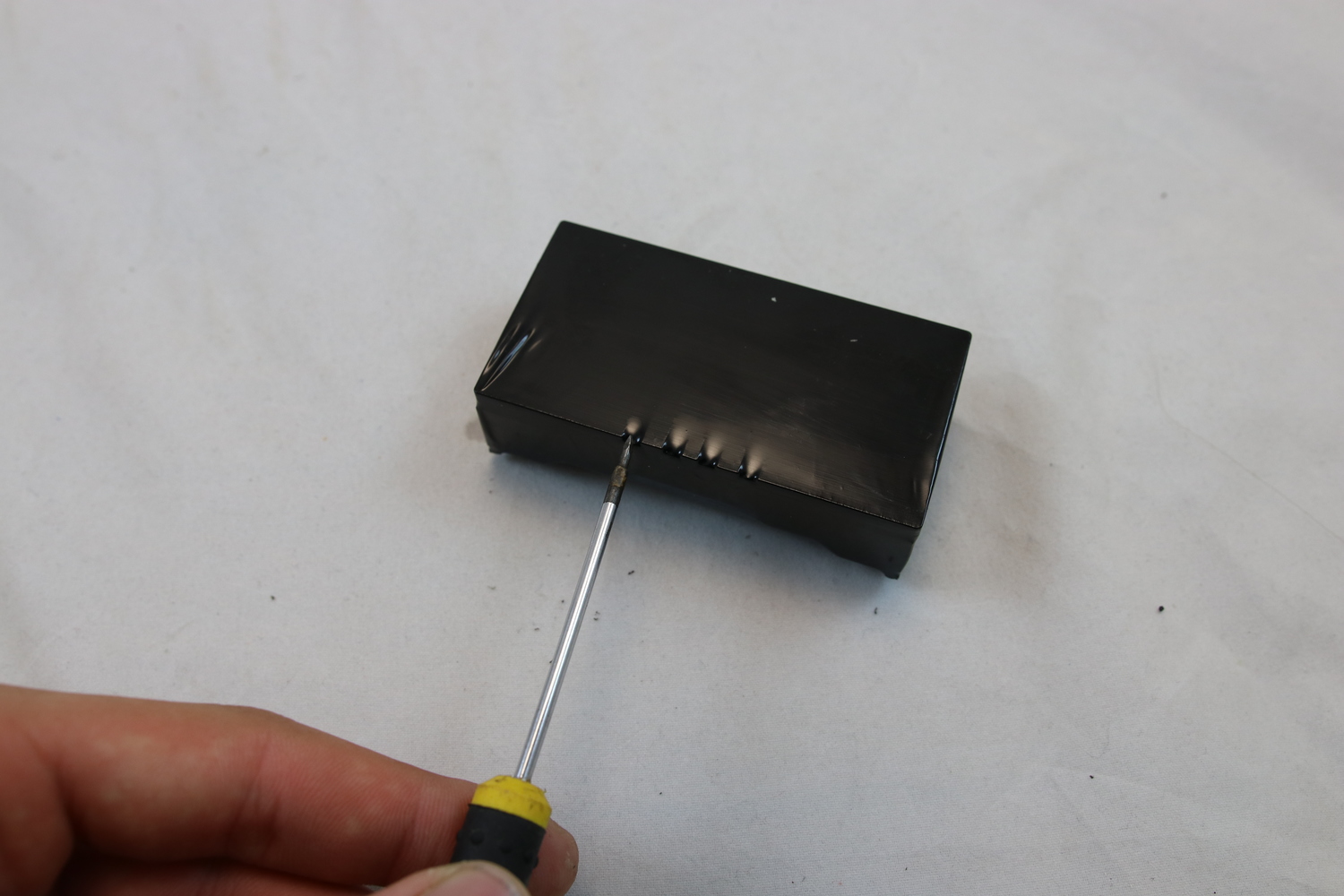
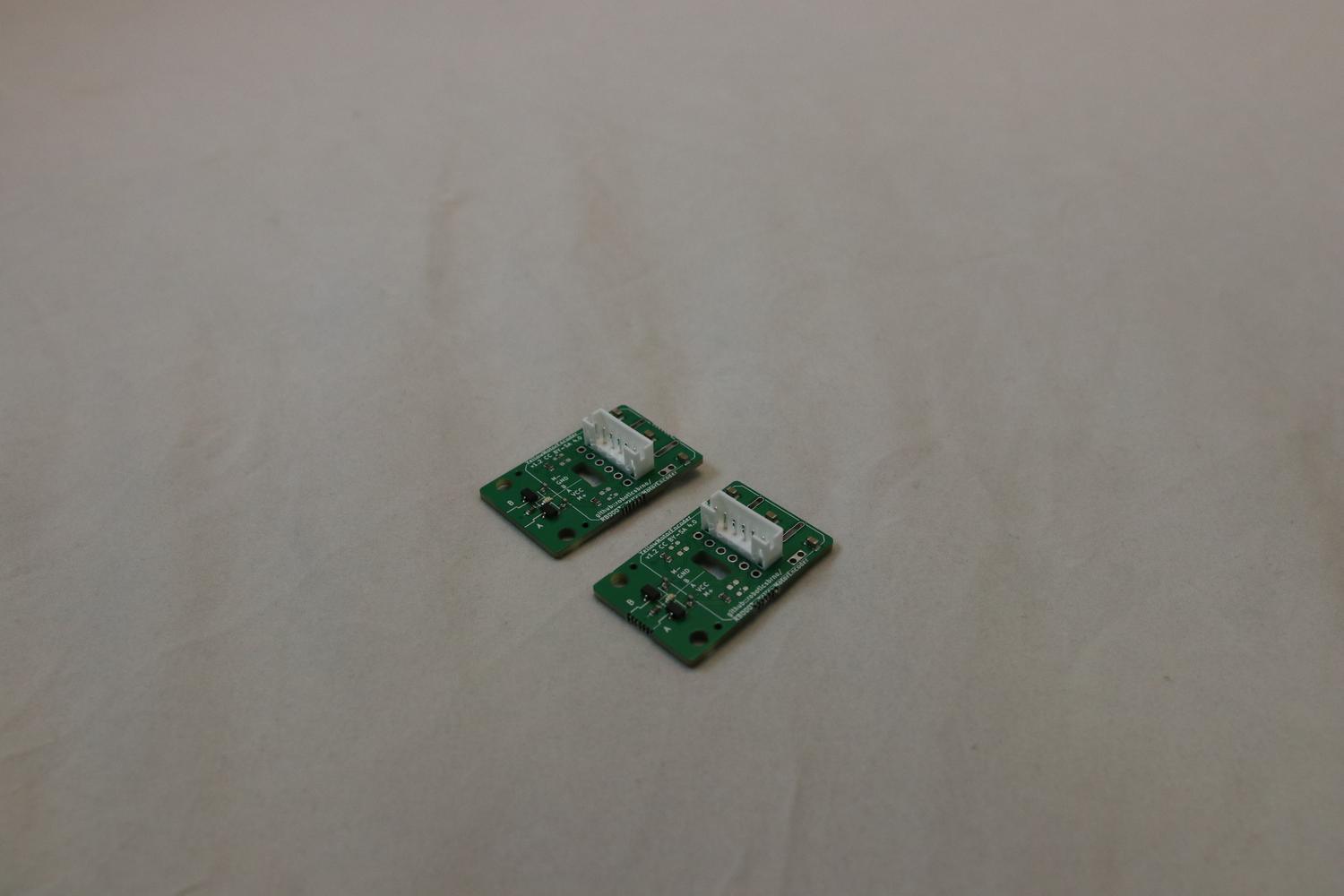
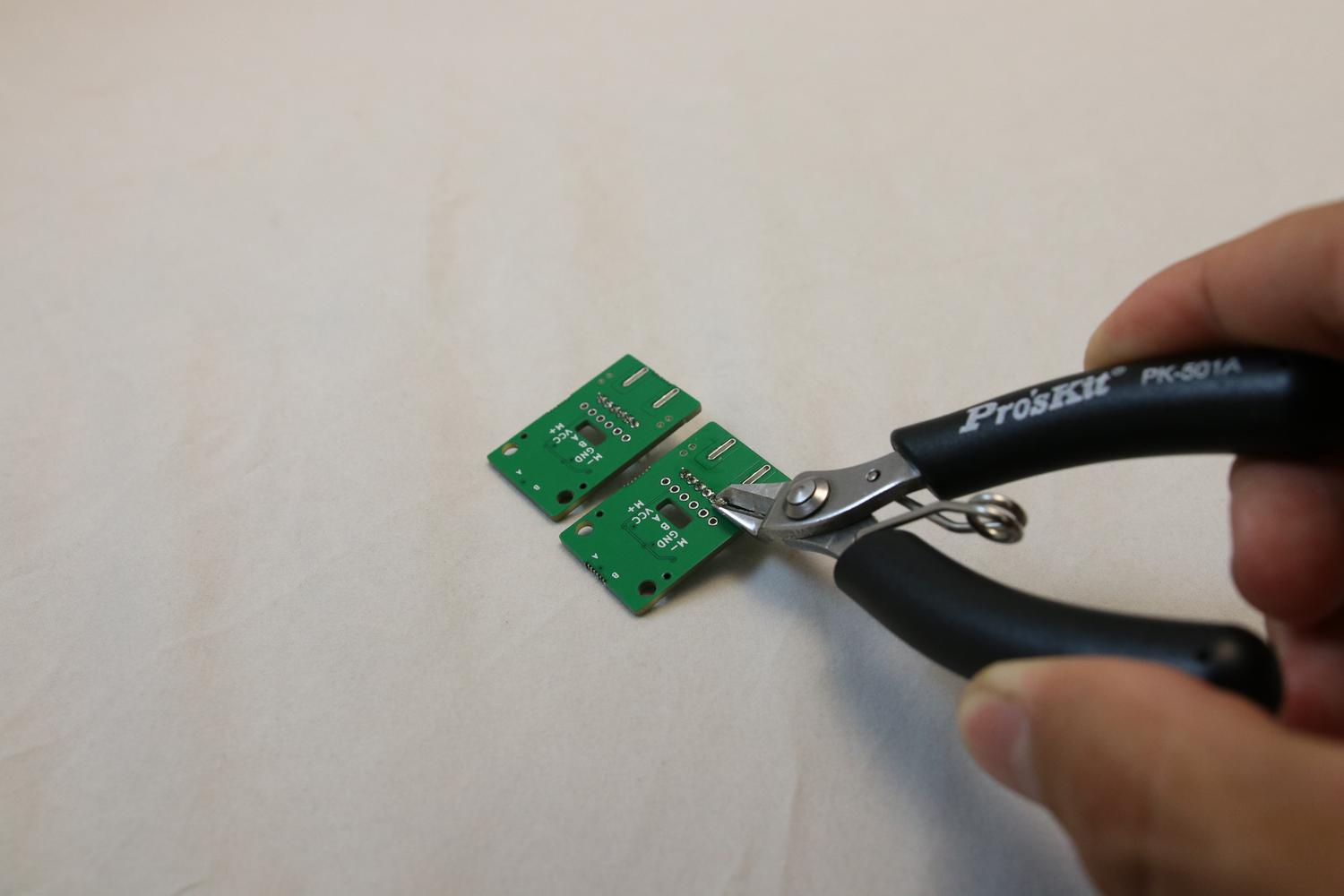
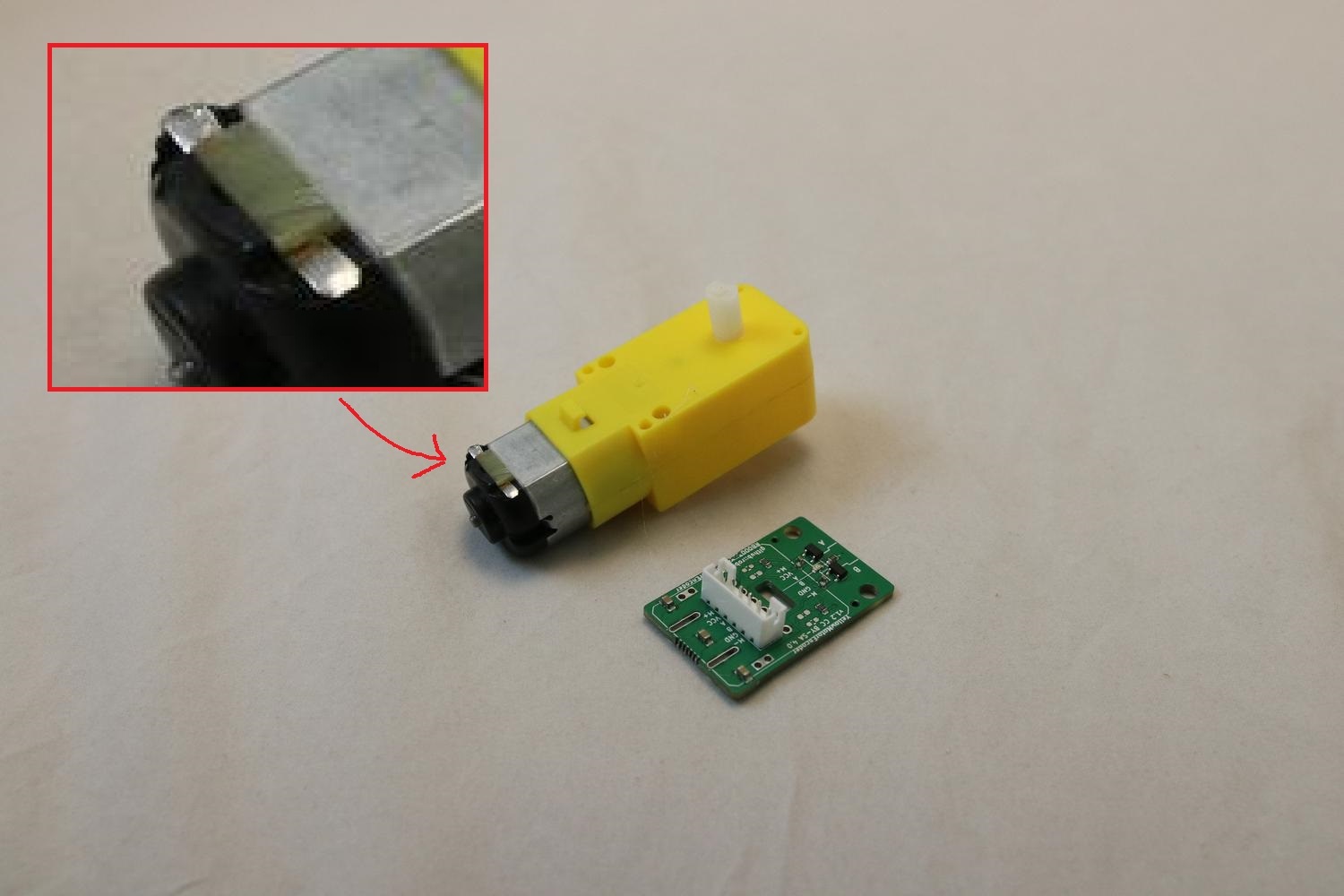
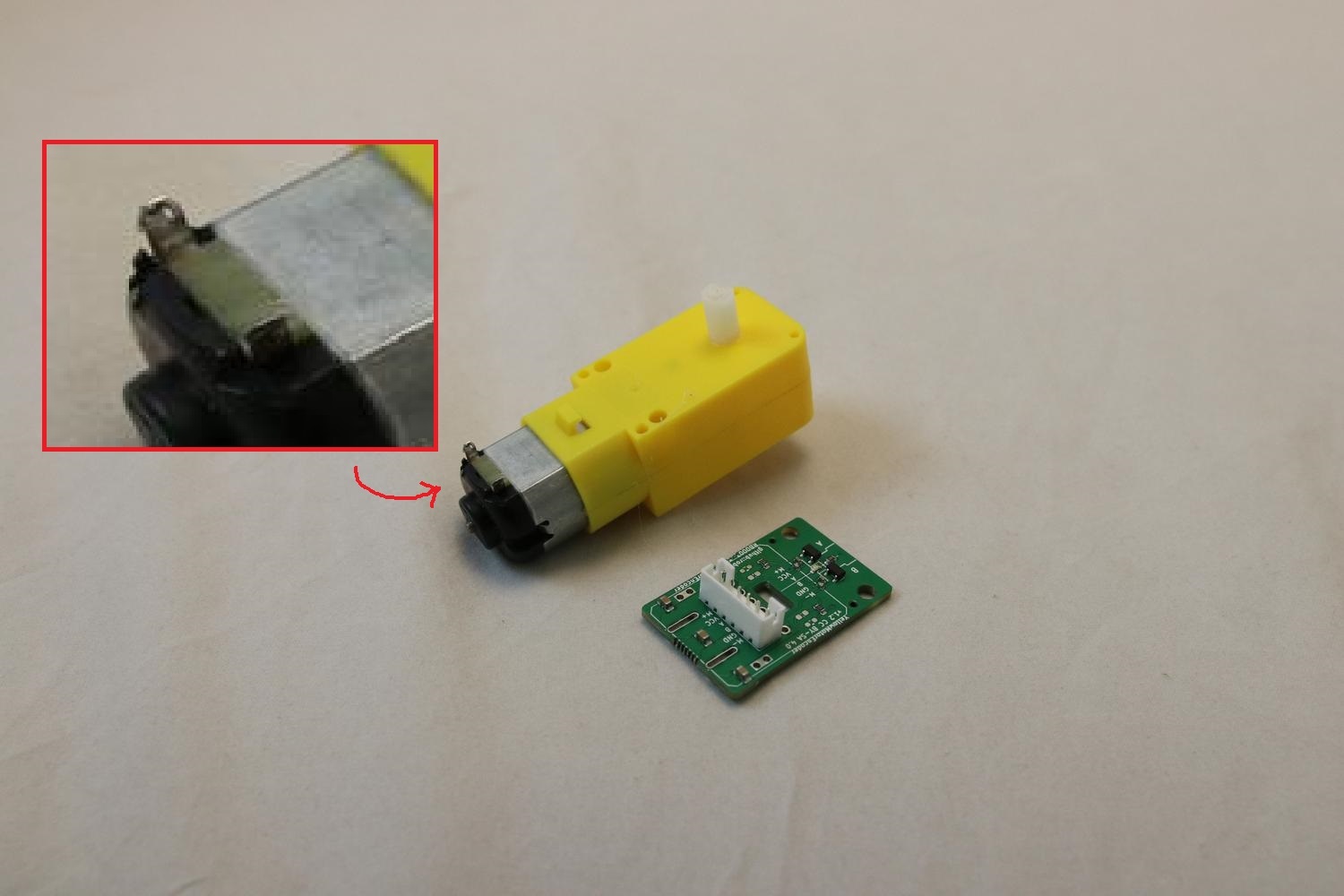
1
Pokud z desky vystupují malé výčnělky jako na obrázku, odstraňte je pomocí kleští
2
3
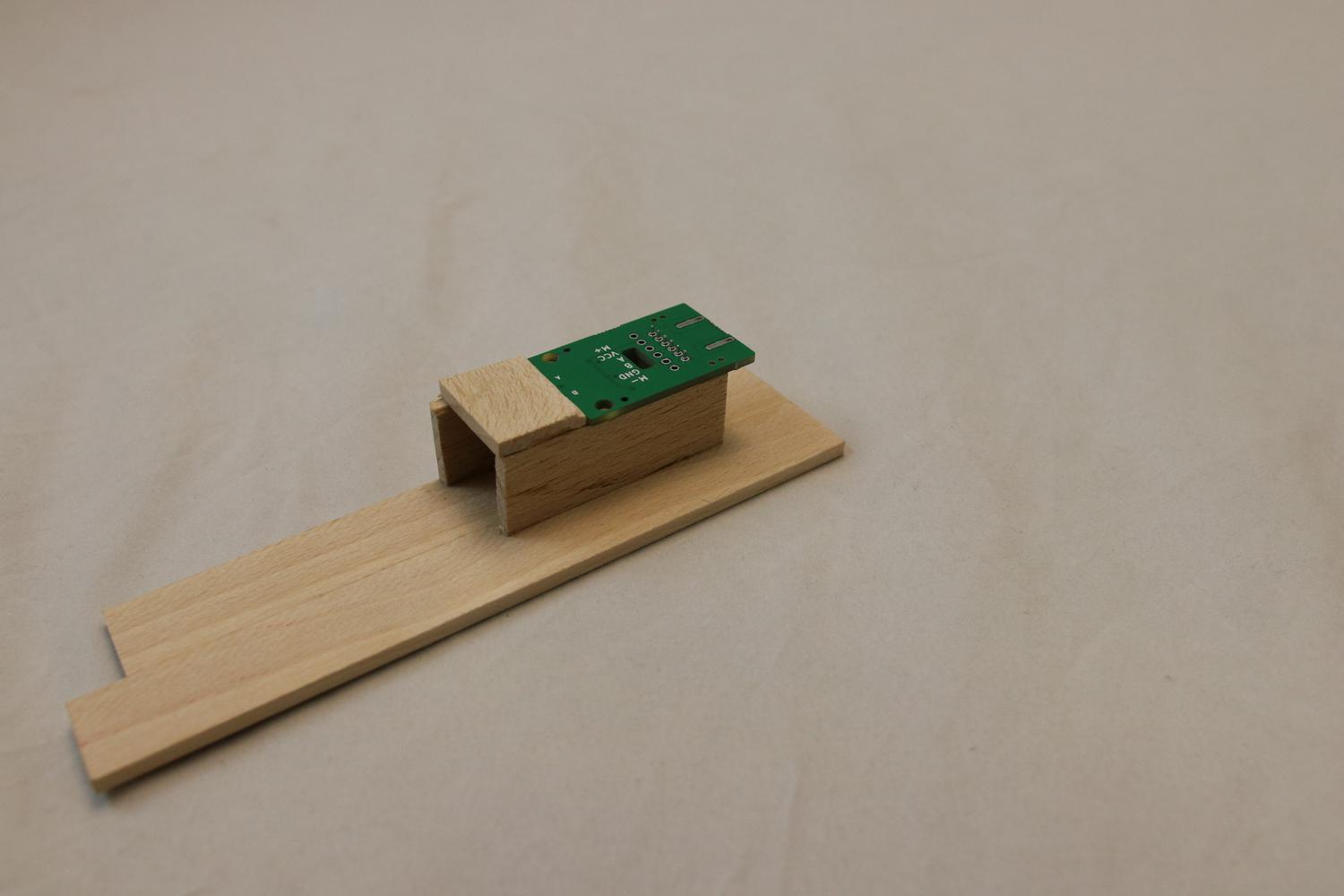
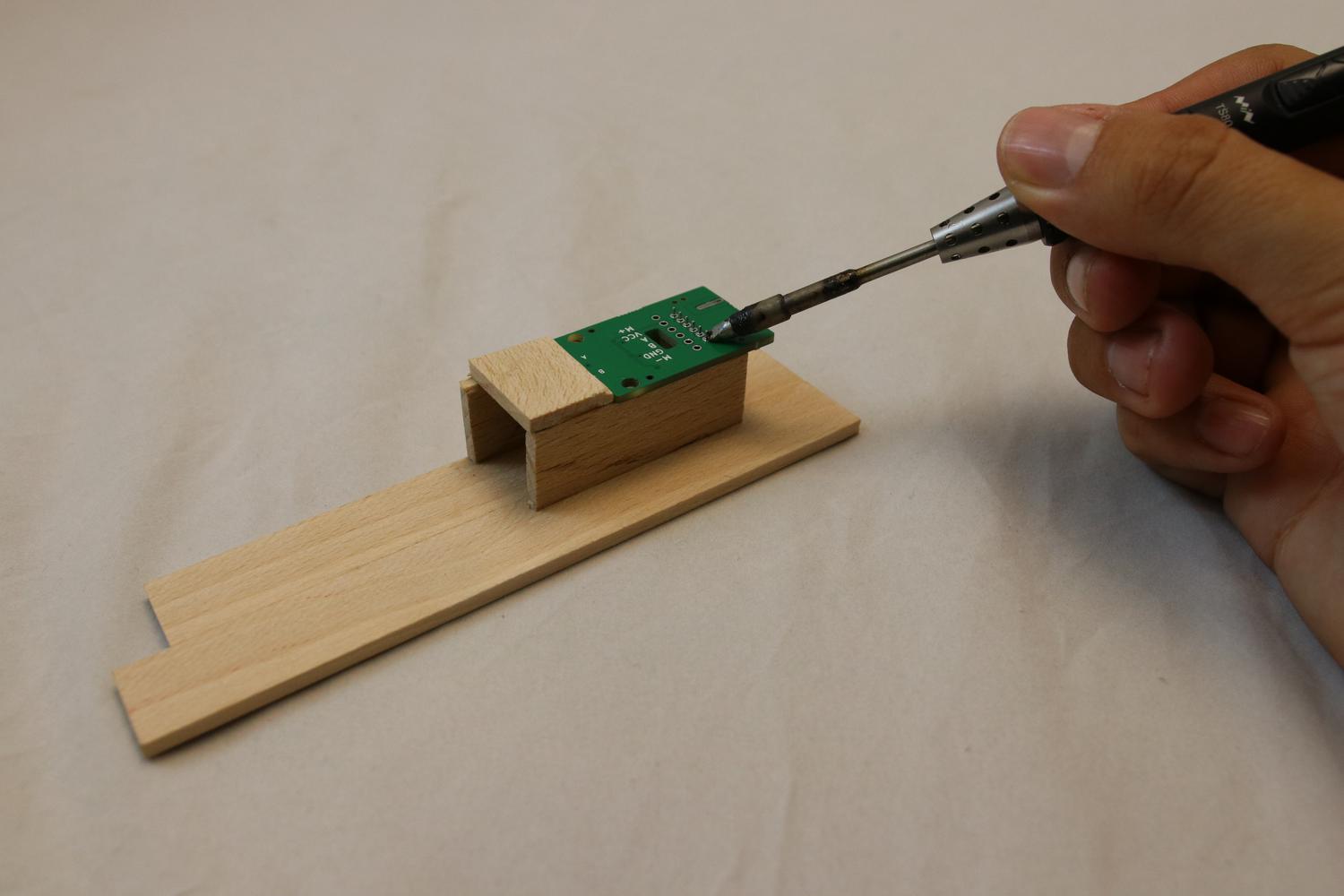
Půjčte si přípravek na pájení
4
5
6
7
8
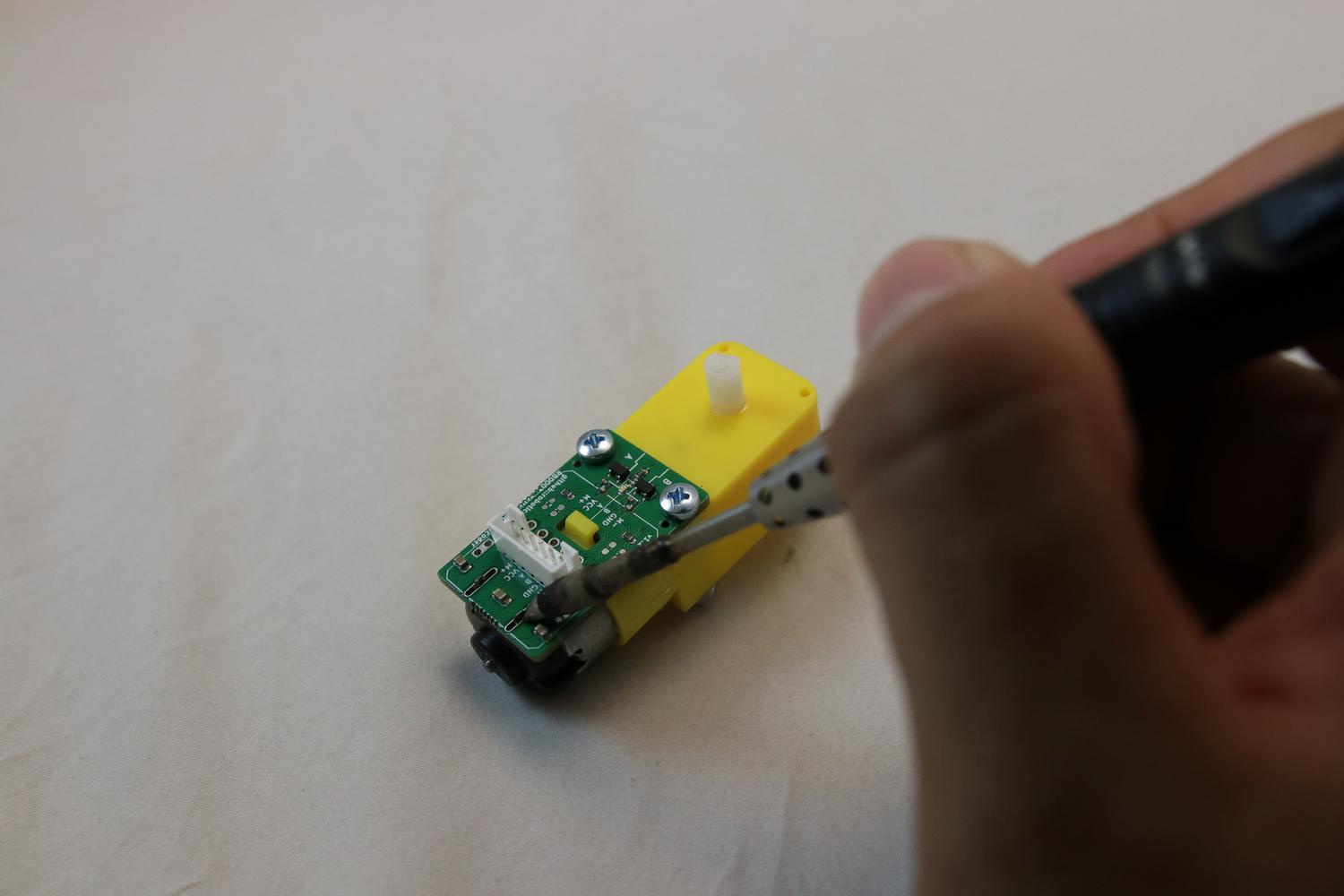
Pomocí štípacích kleští odstraňte přečnívající nožičky
9
Opatrně ohněte kontakty motoru
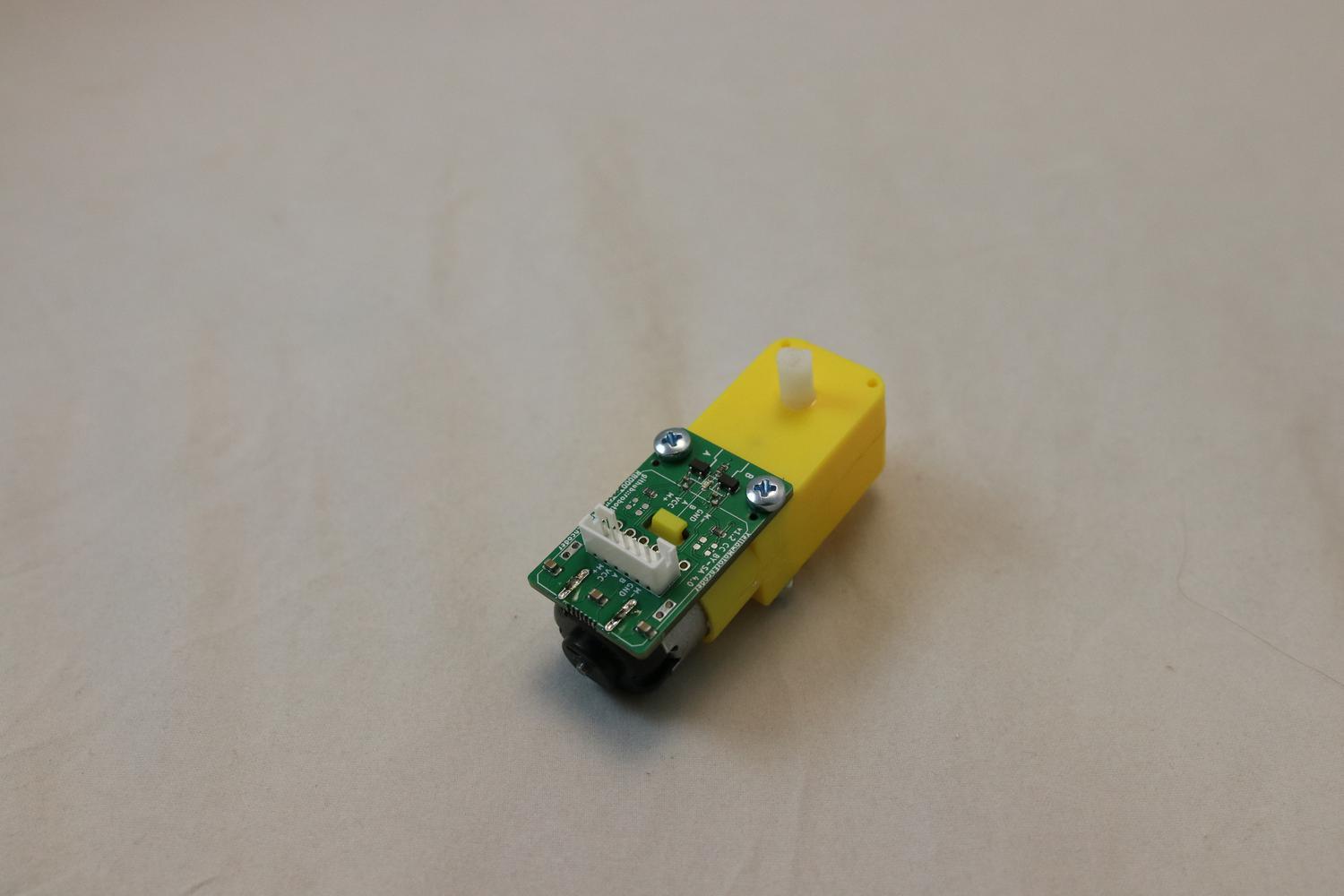
10

11
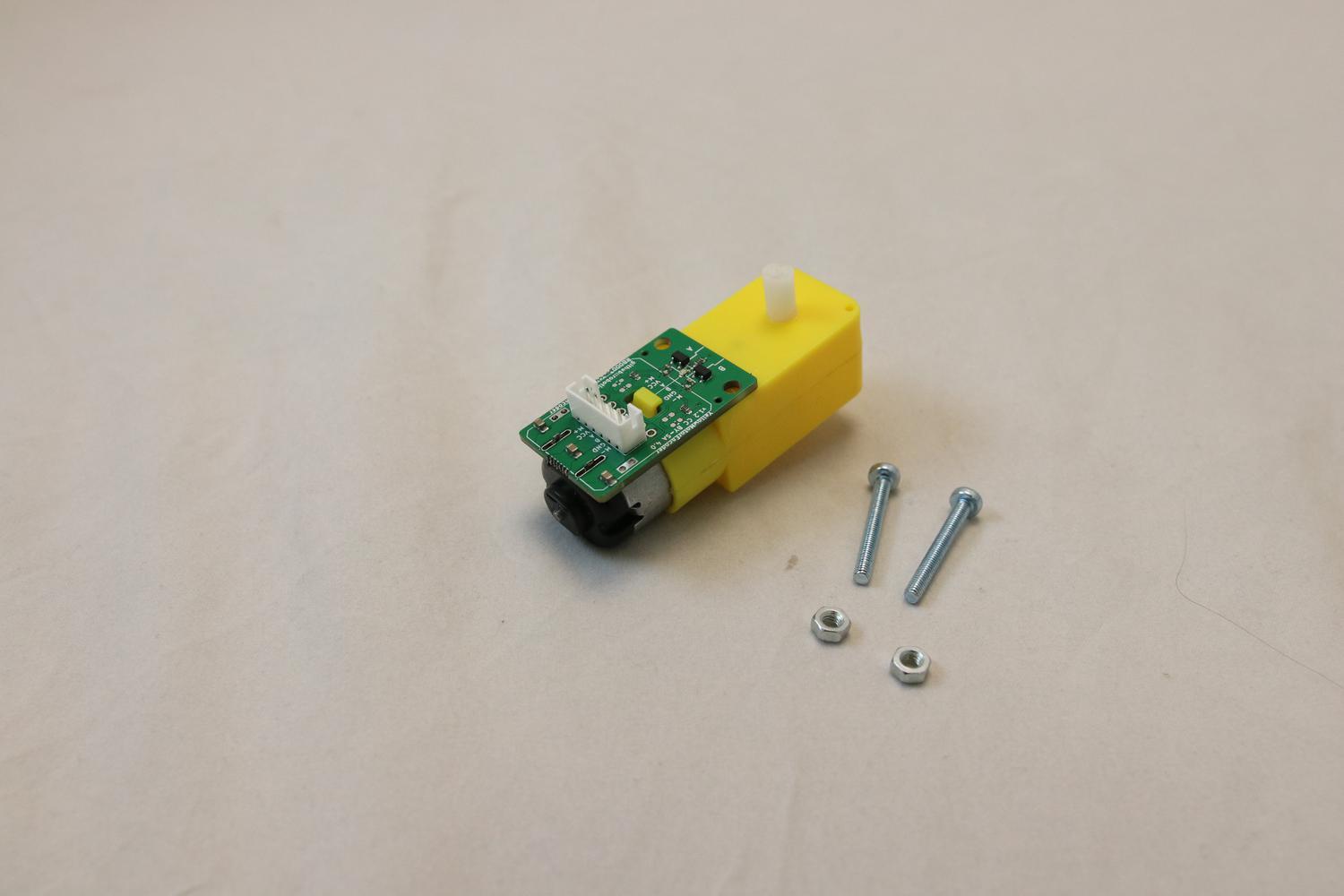
12
Použijte šroubky M3x25 a matky M3
13
14
15
16
17
18

19
20
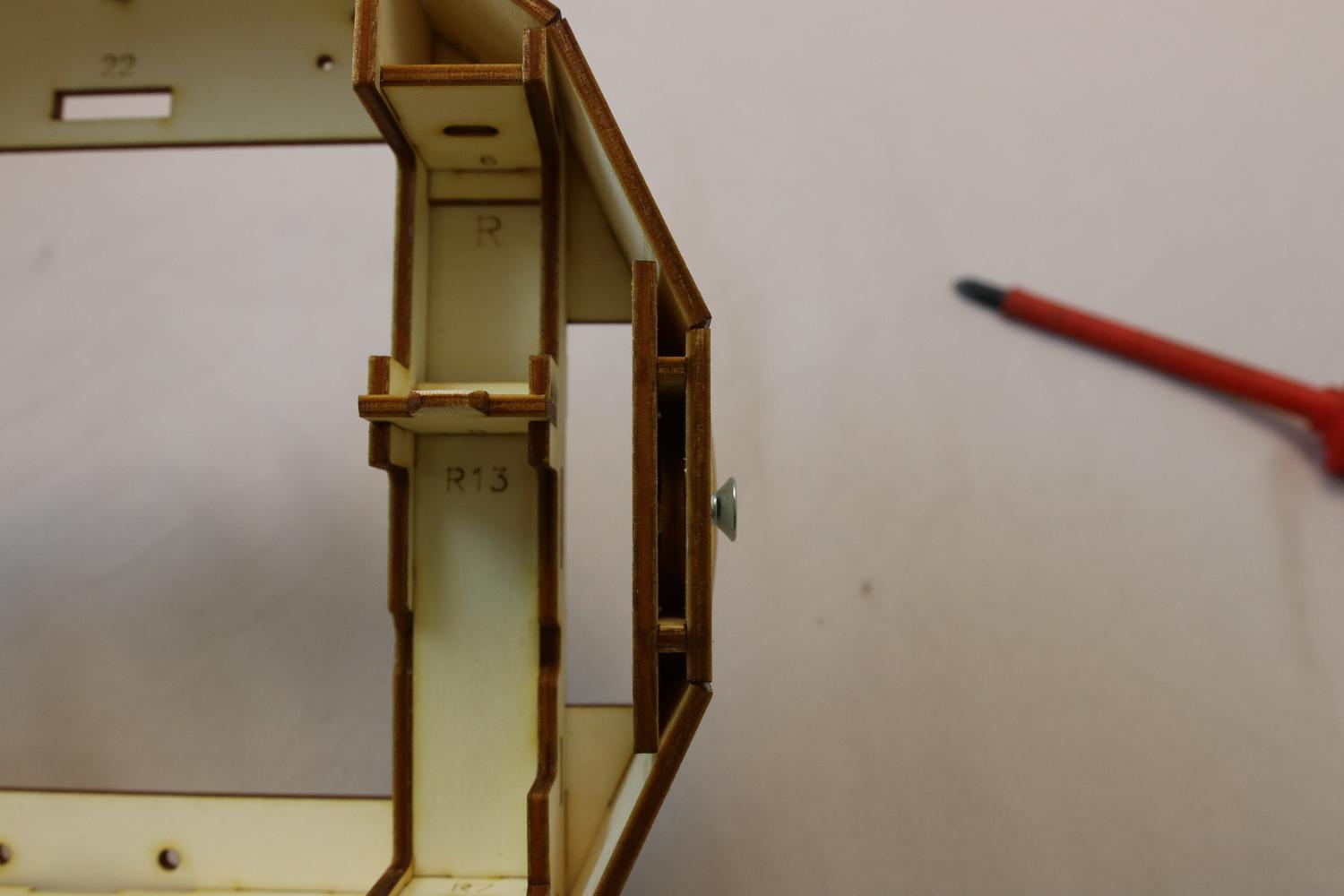
Vyšroubujte šroubek
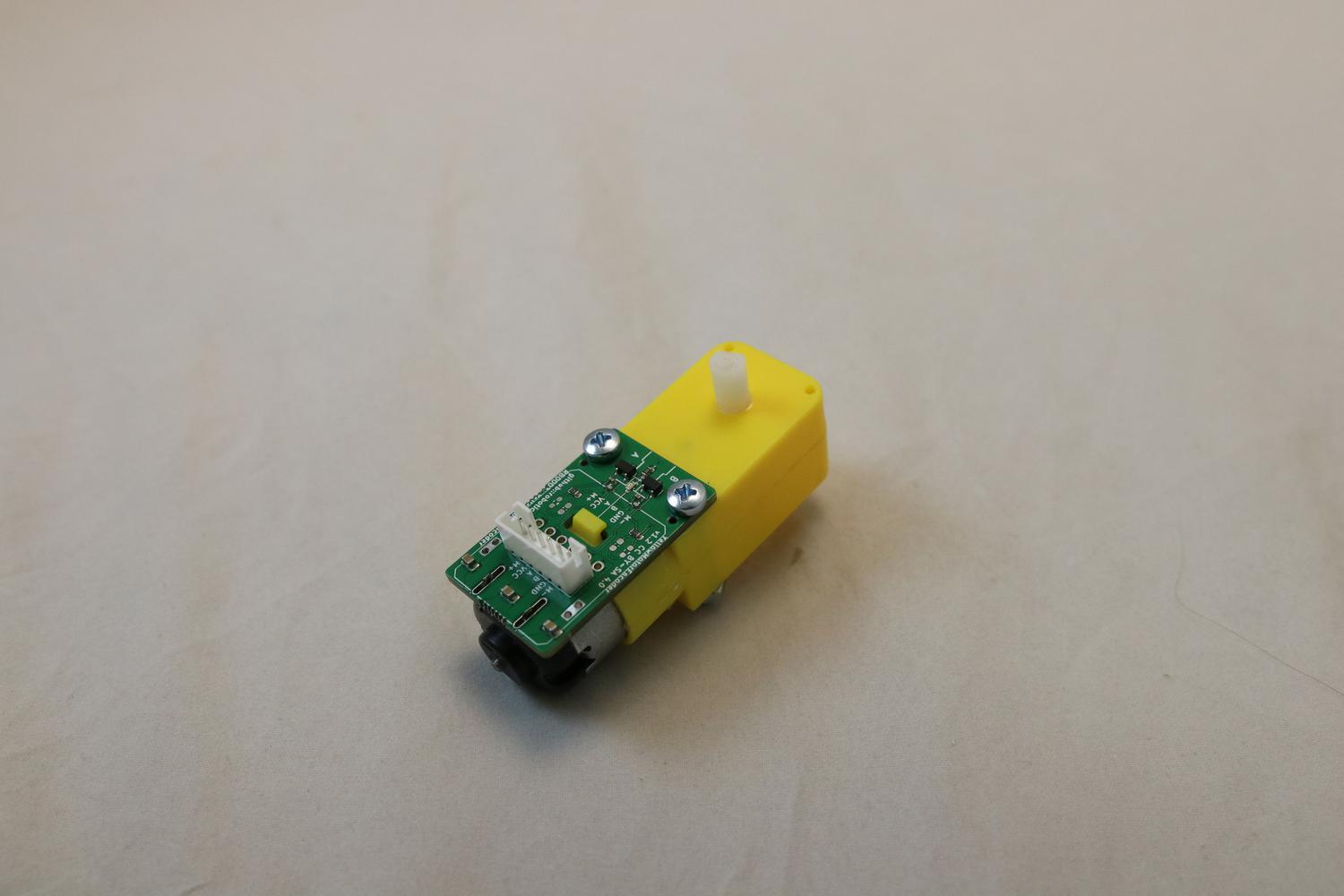
21
22
Zašroubujte šroubek

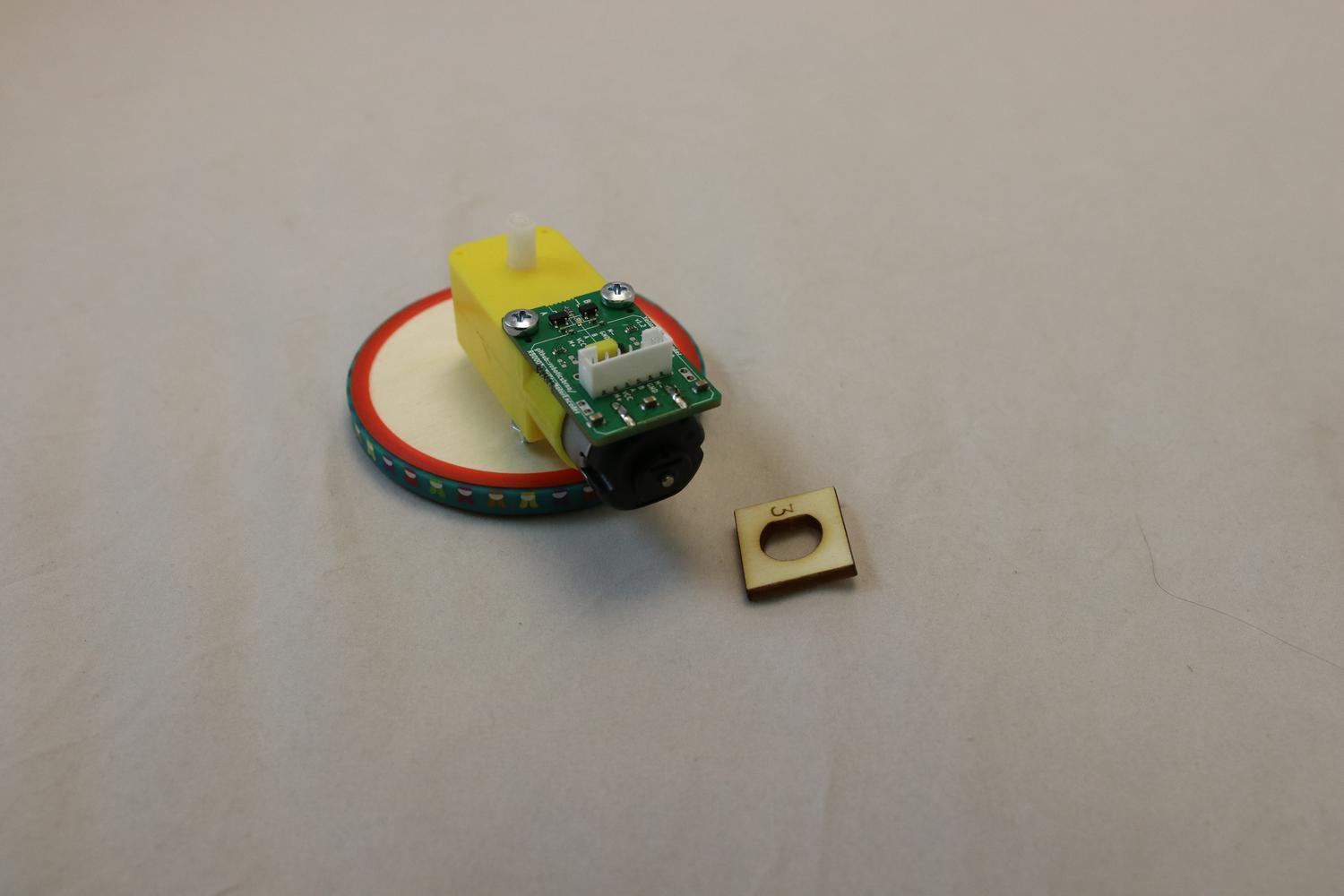
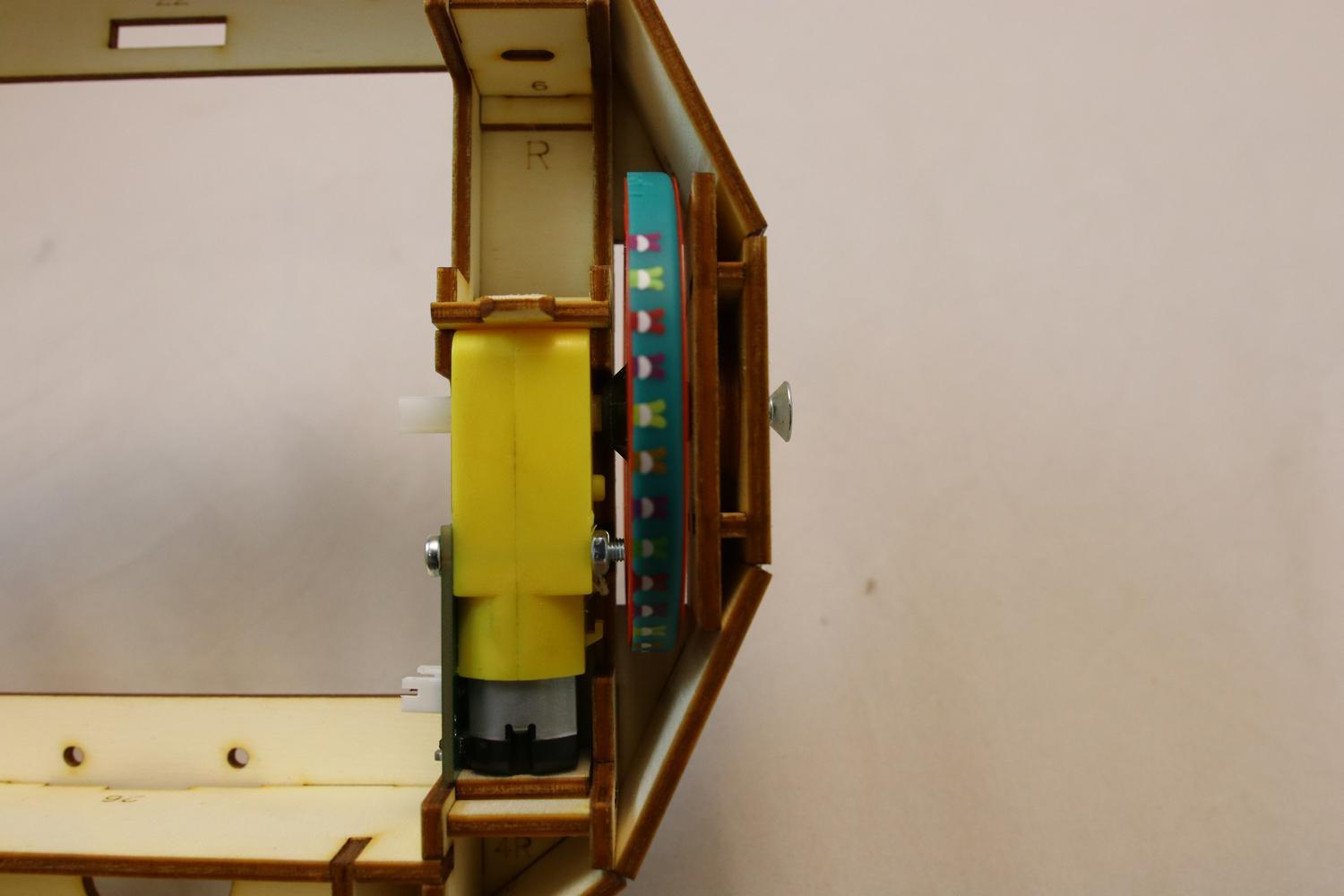
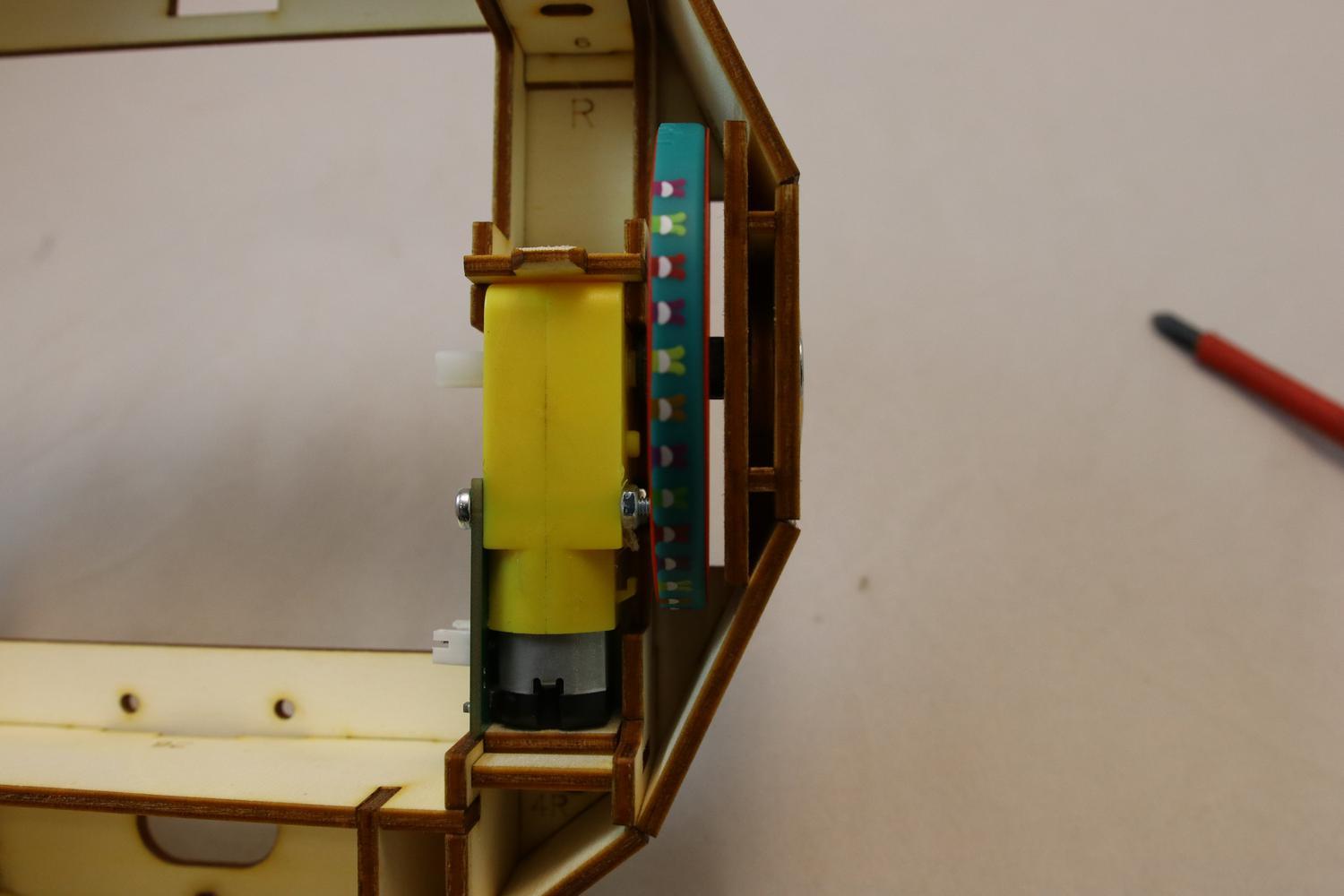
23
Vložte stejným způsobem i druhý motor
Kryt
1
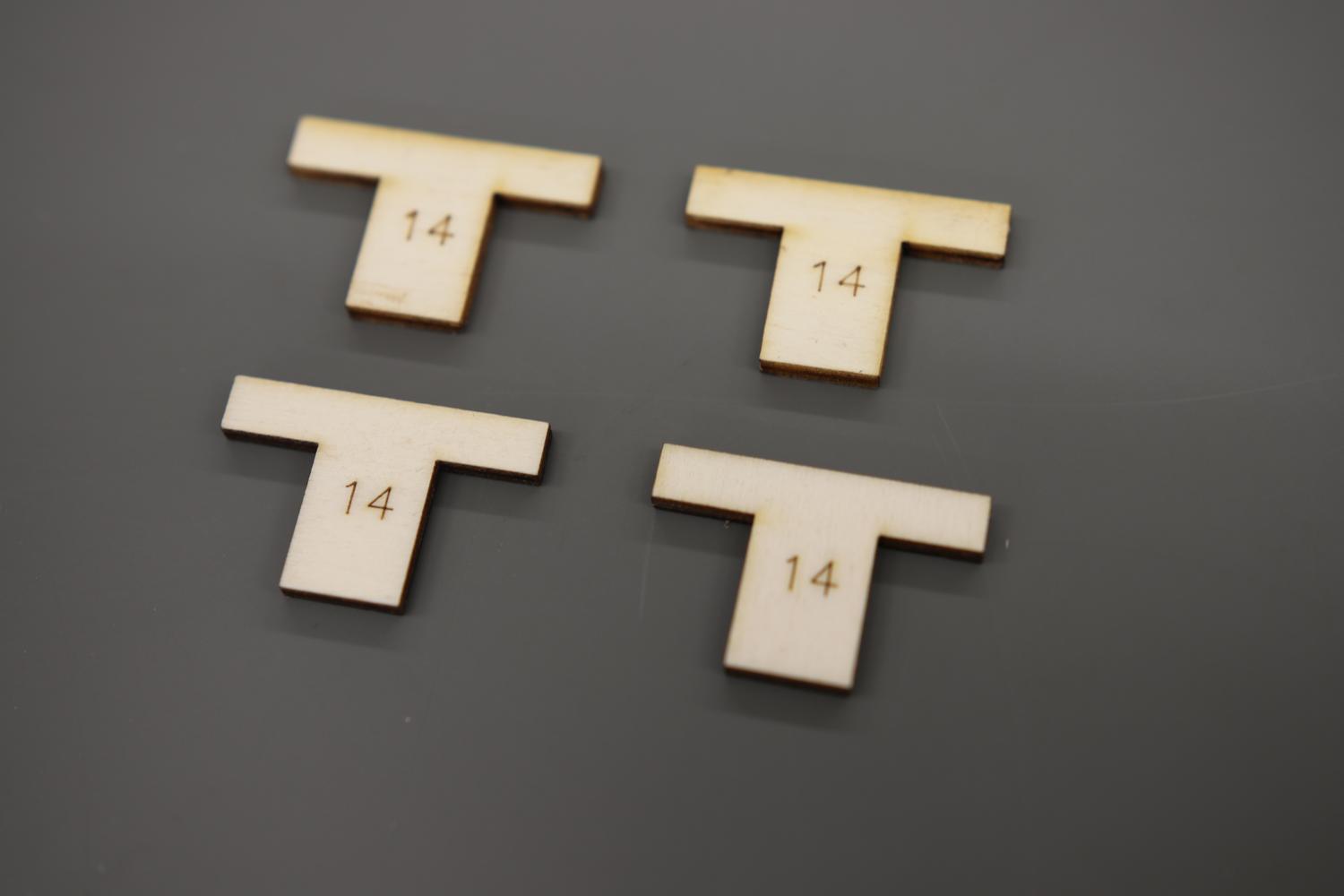
2
3
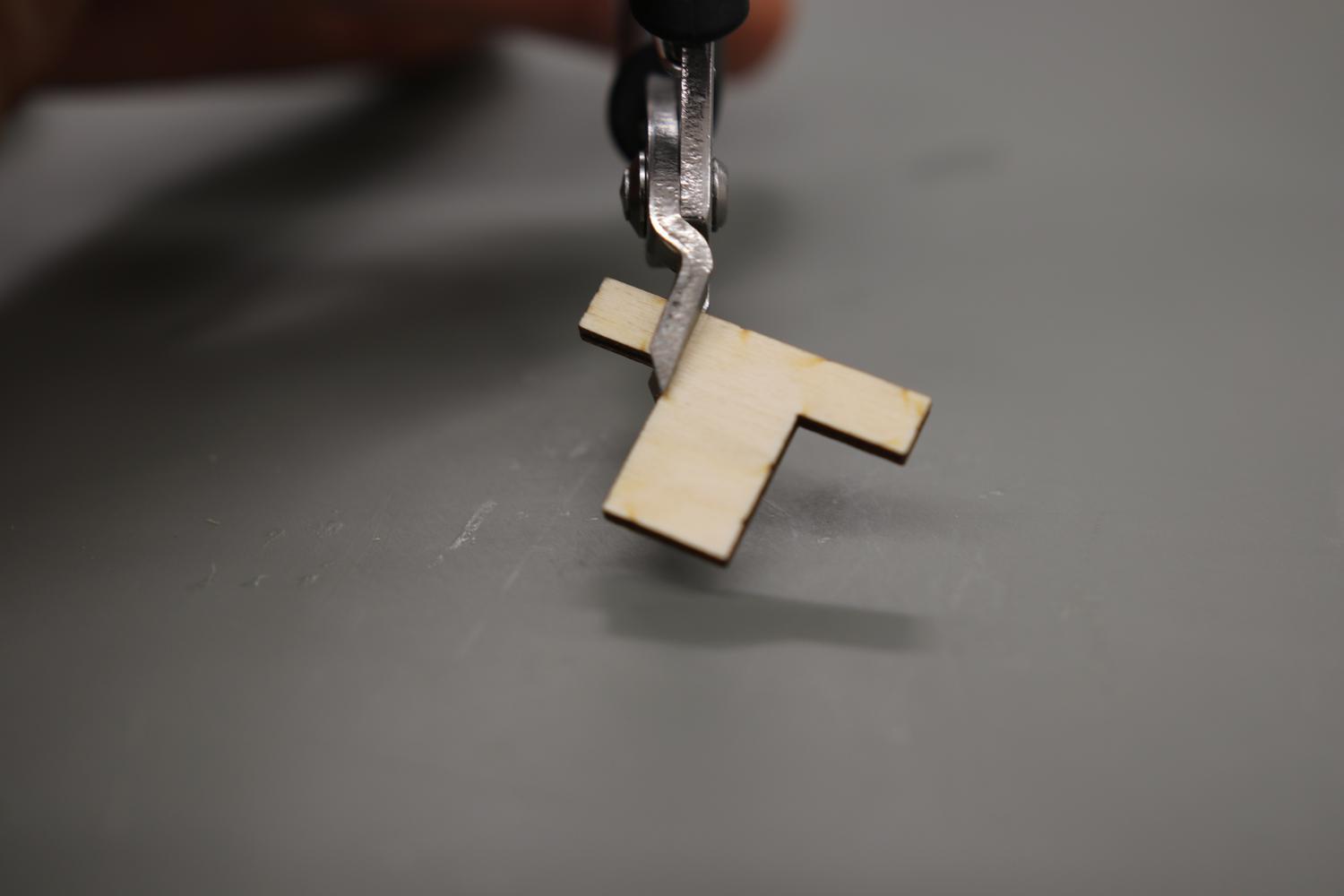
Štípačkami odstříháme boční výstupky dílků č. 14

4
Vznikne vám 8 zobáčků

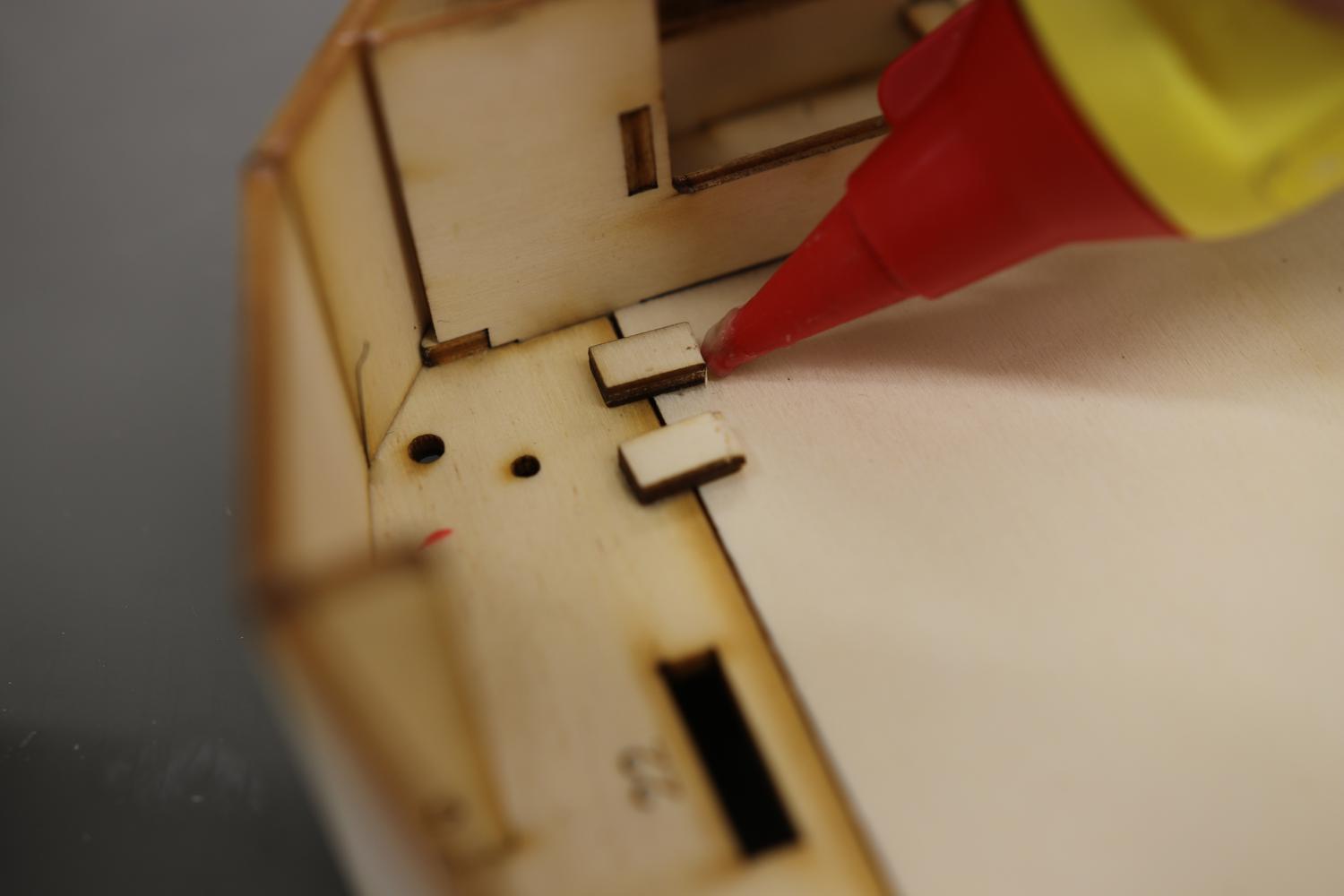
5
Přilepte zobáček pouze k palubě

6
Přilepte zobáček opět pouze k palubě
7
Tento zobáček přilepte ke krytu
8
Tento zobáček přilepte také ke krytu

9
Na opačné straně přilepte zobáčky k palubě

10
Tento také přilepte k palubě
11
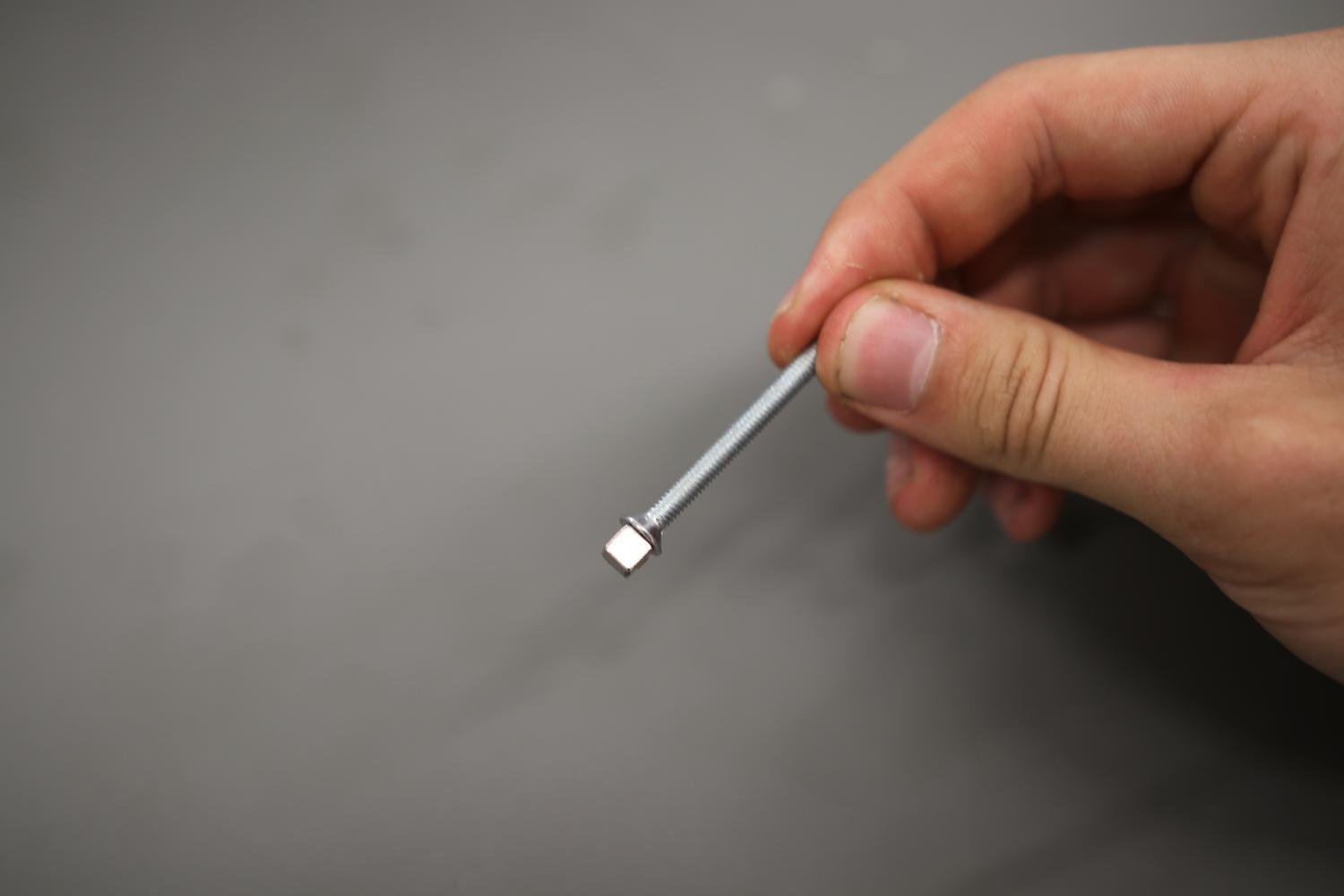
Magnet přichytněte na šroub M4

12
Opatrně naneste kapku vteřiňáku

13
14
Mezi magnety vložte plíšek pro vytvoření mezery, zatím nic nelepíme
15
Naneste lepidlo na volný magnet

16
Zaklopte krytem

17

18
19
20
21

22
23
24

25
Kompletace podvozku
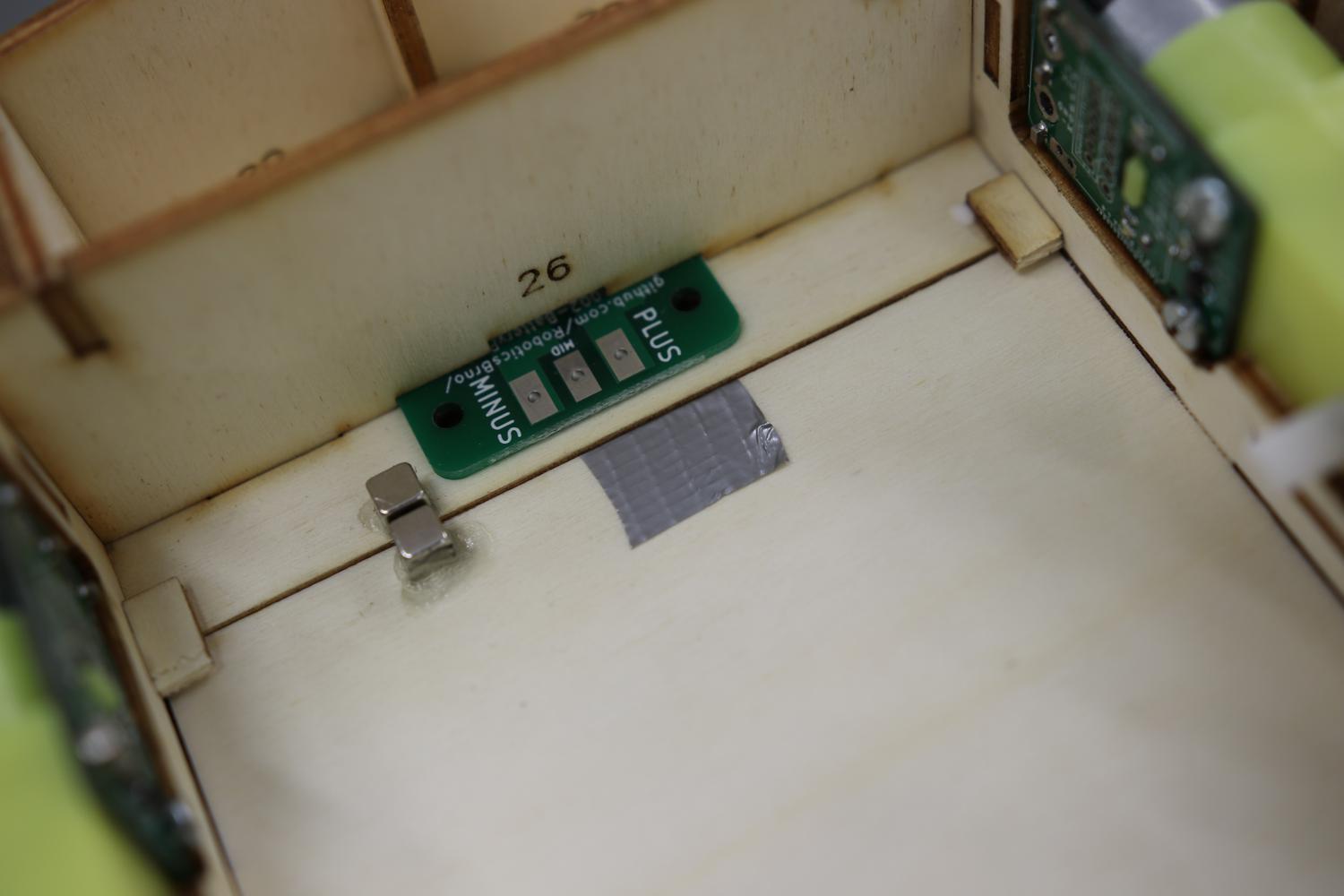
Napájení RBCX

1
Délka kabelu je cca 30cm
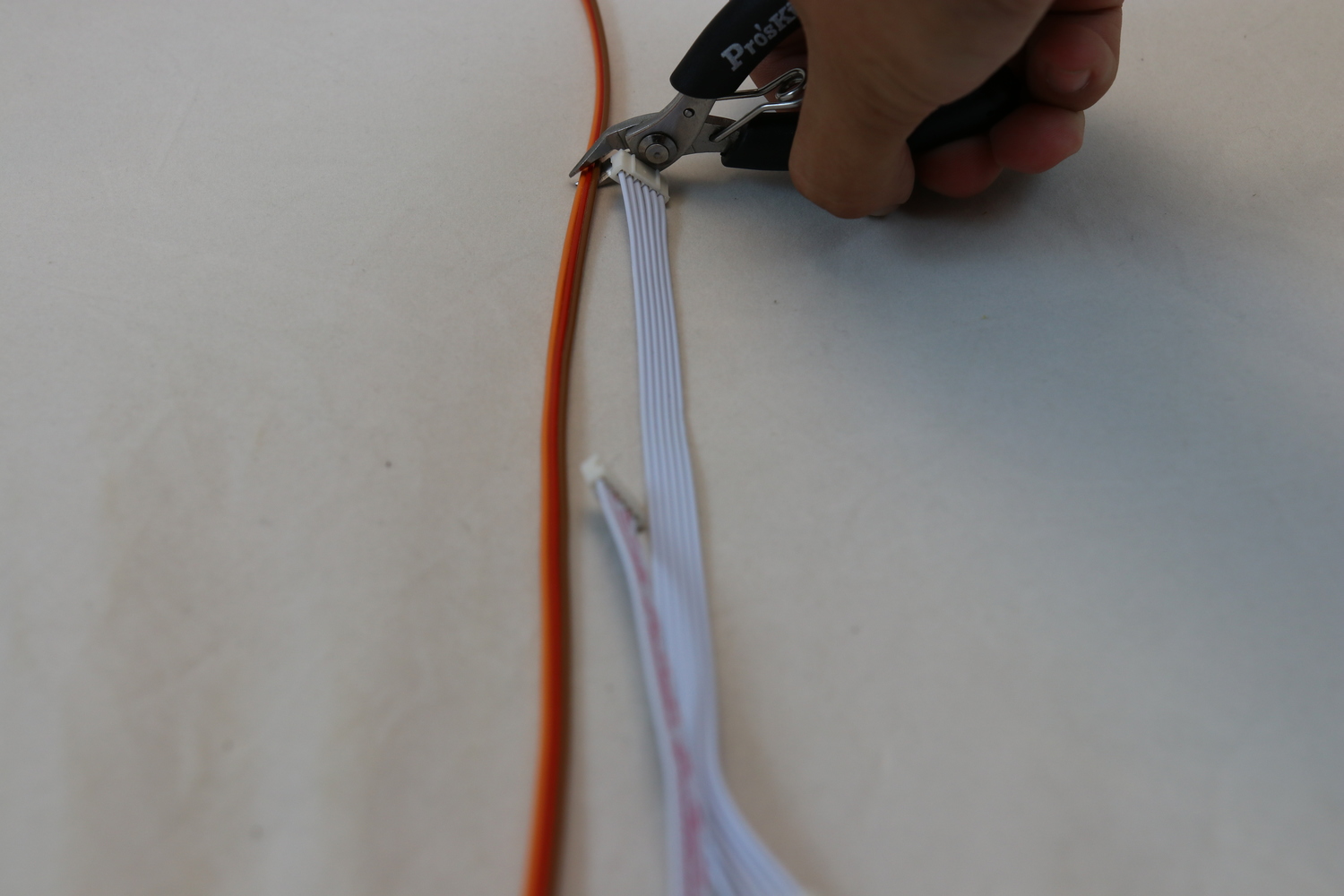
2
3

4
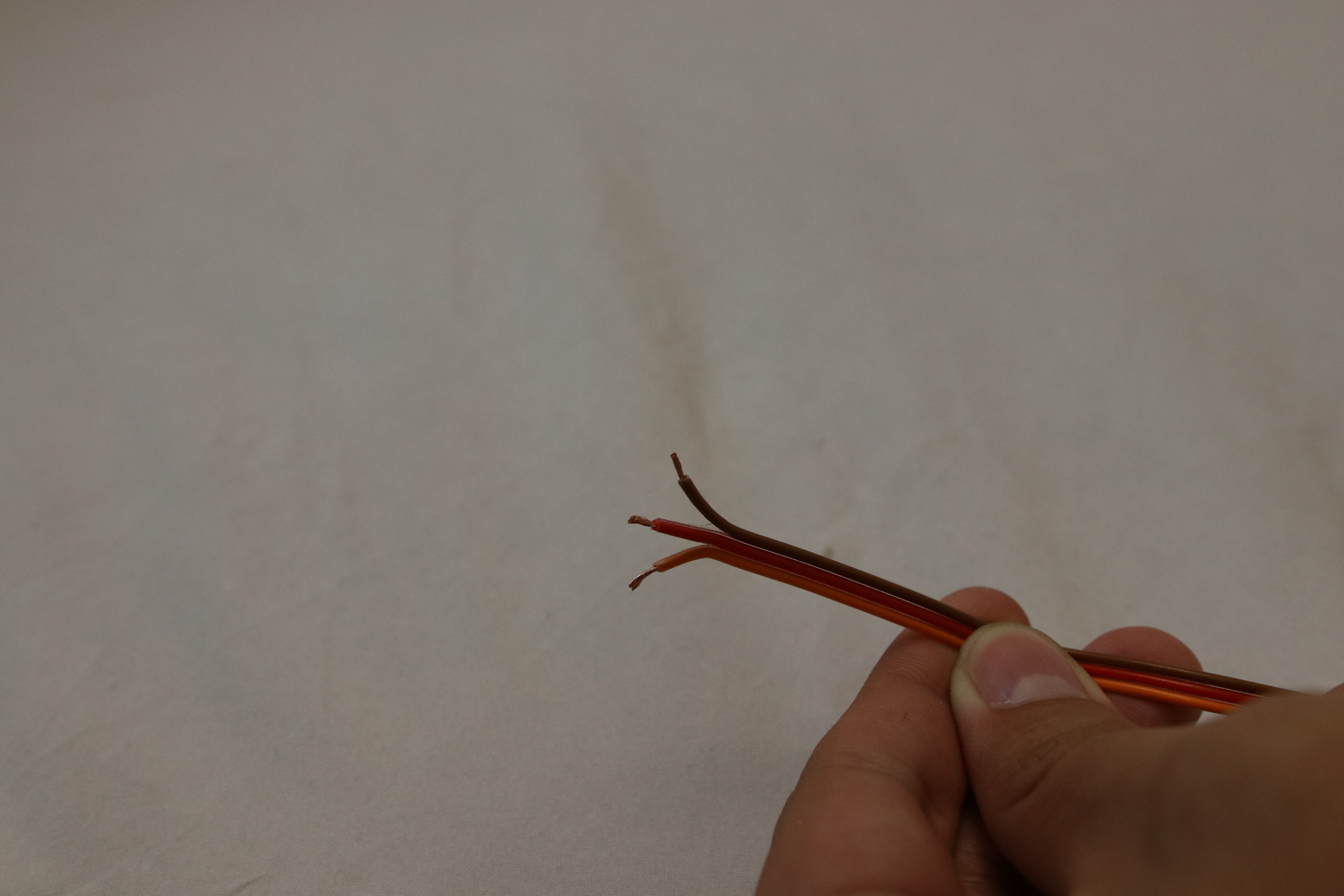
Hnědý drát na MINUS, červený na MID a oranžový na PLUS

5
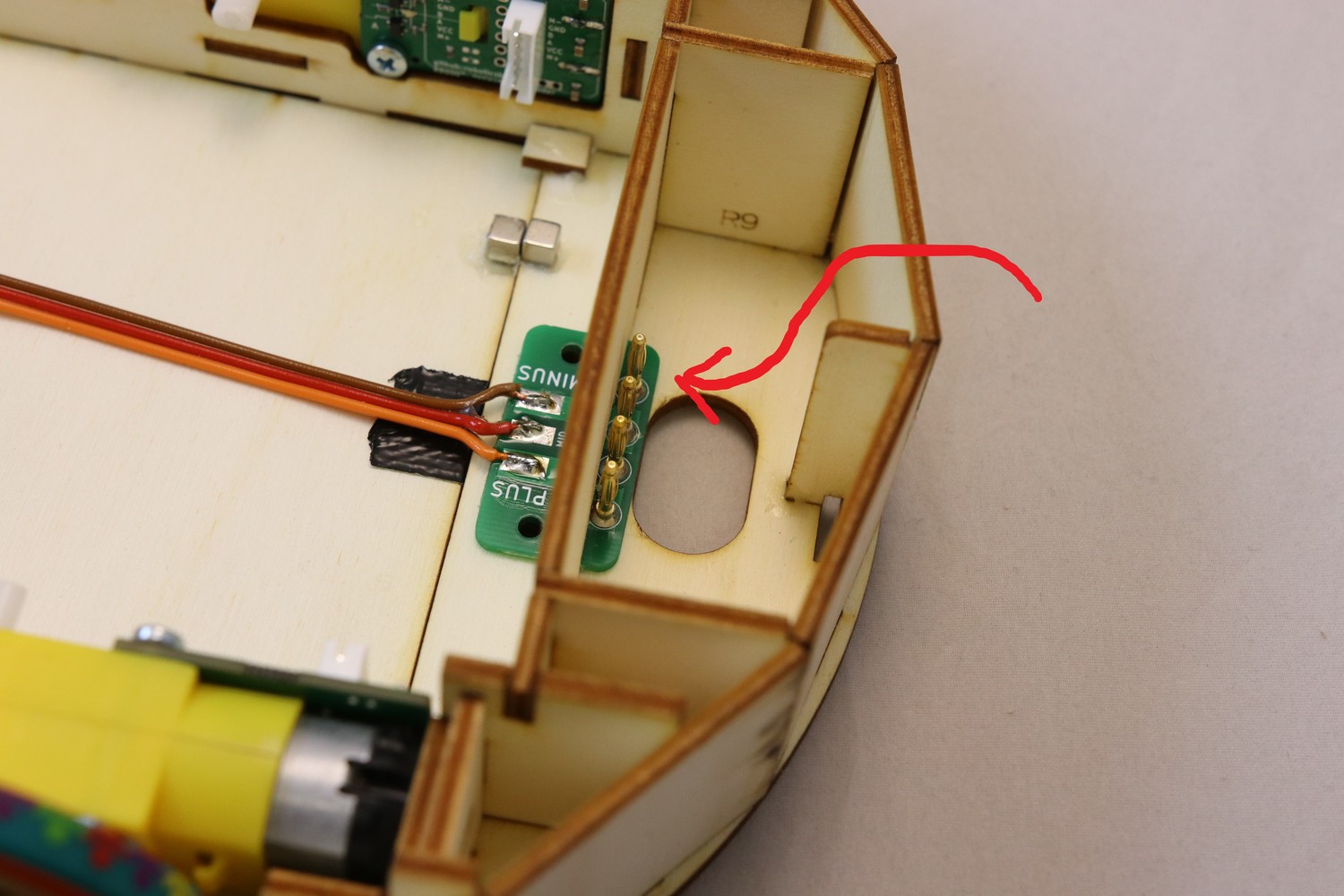
6
Zasuňte konektor ve směru šipky

7

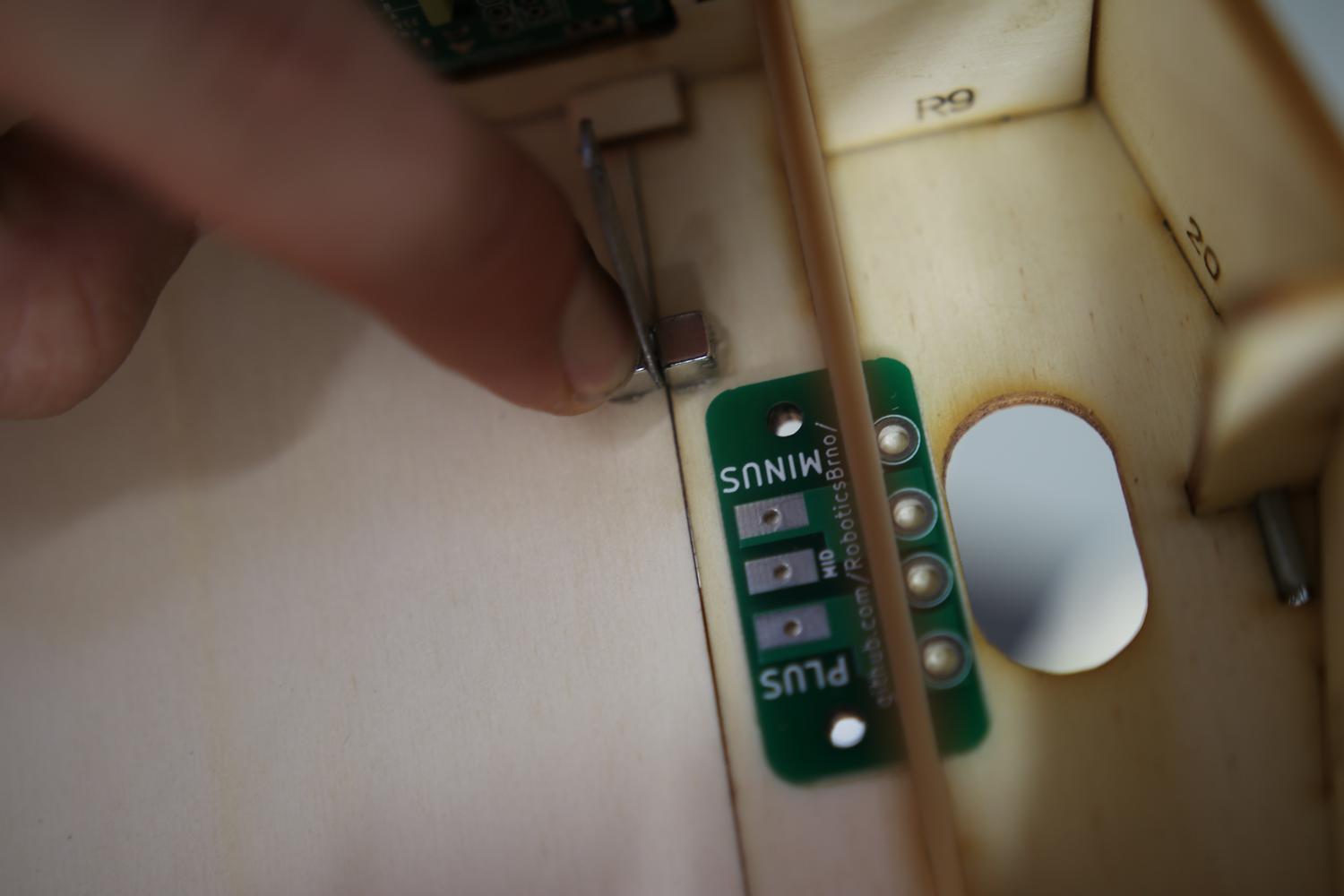
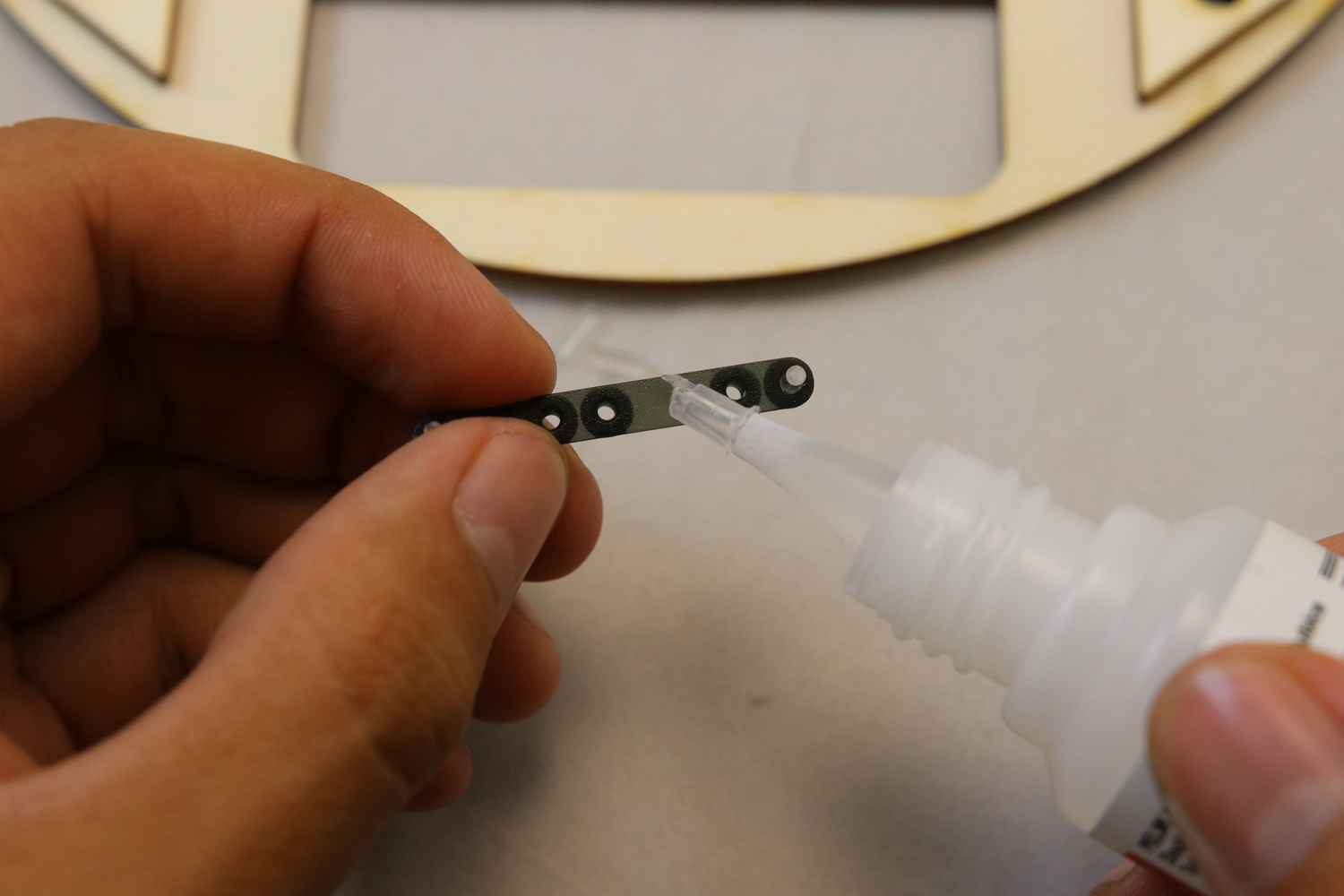
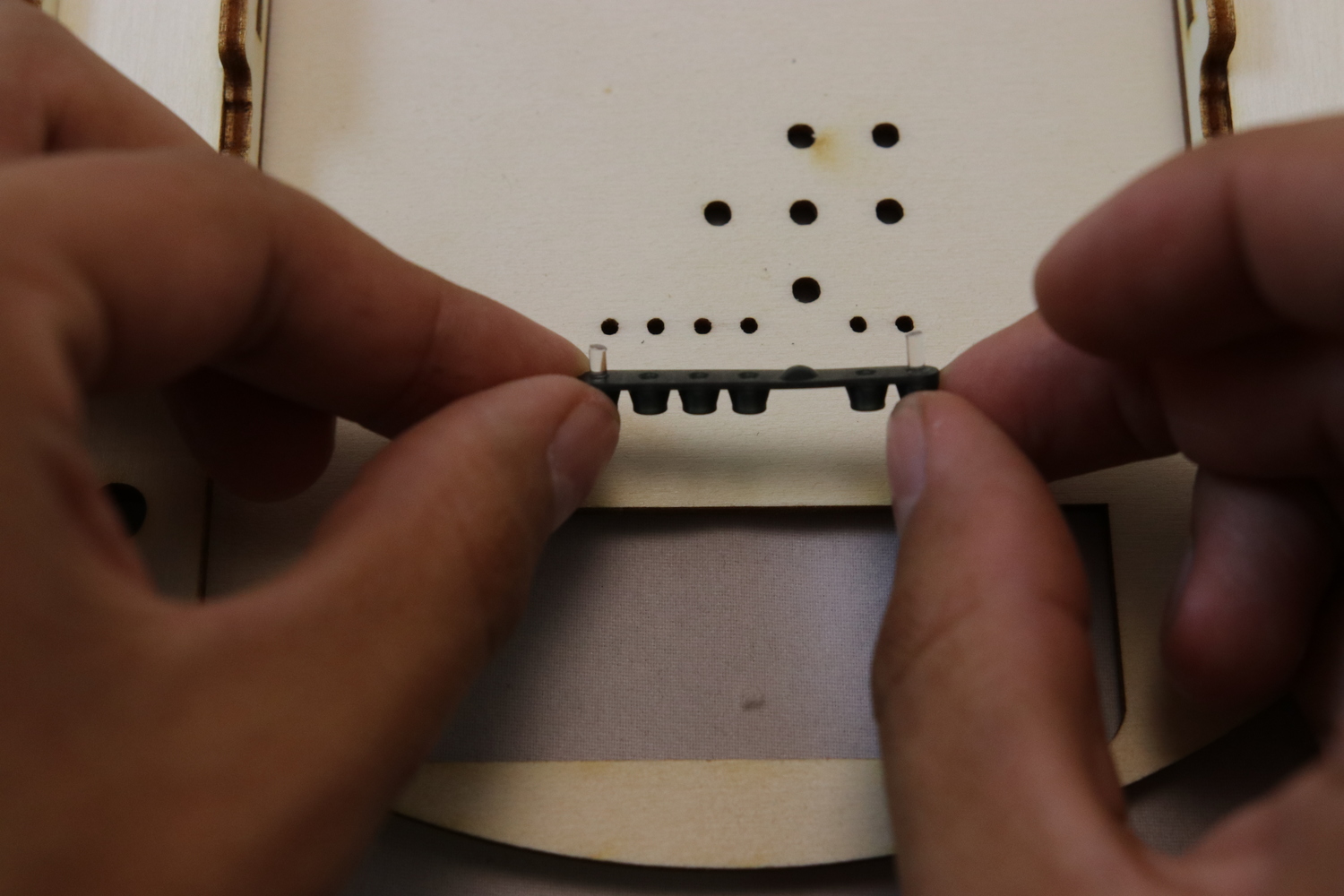
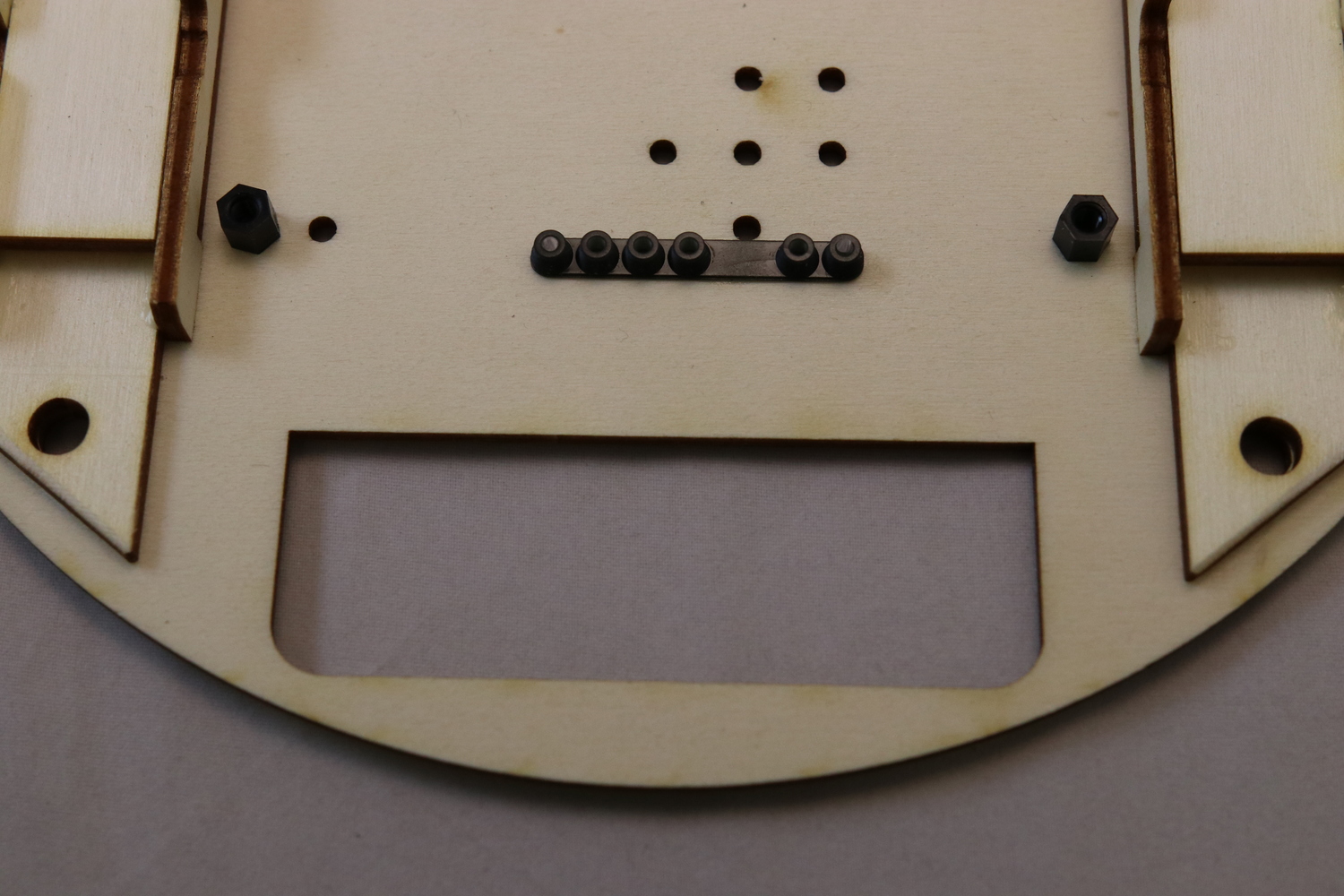
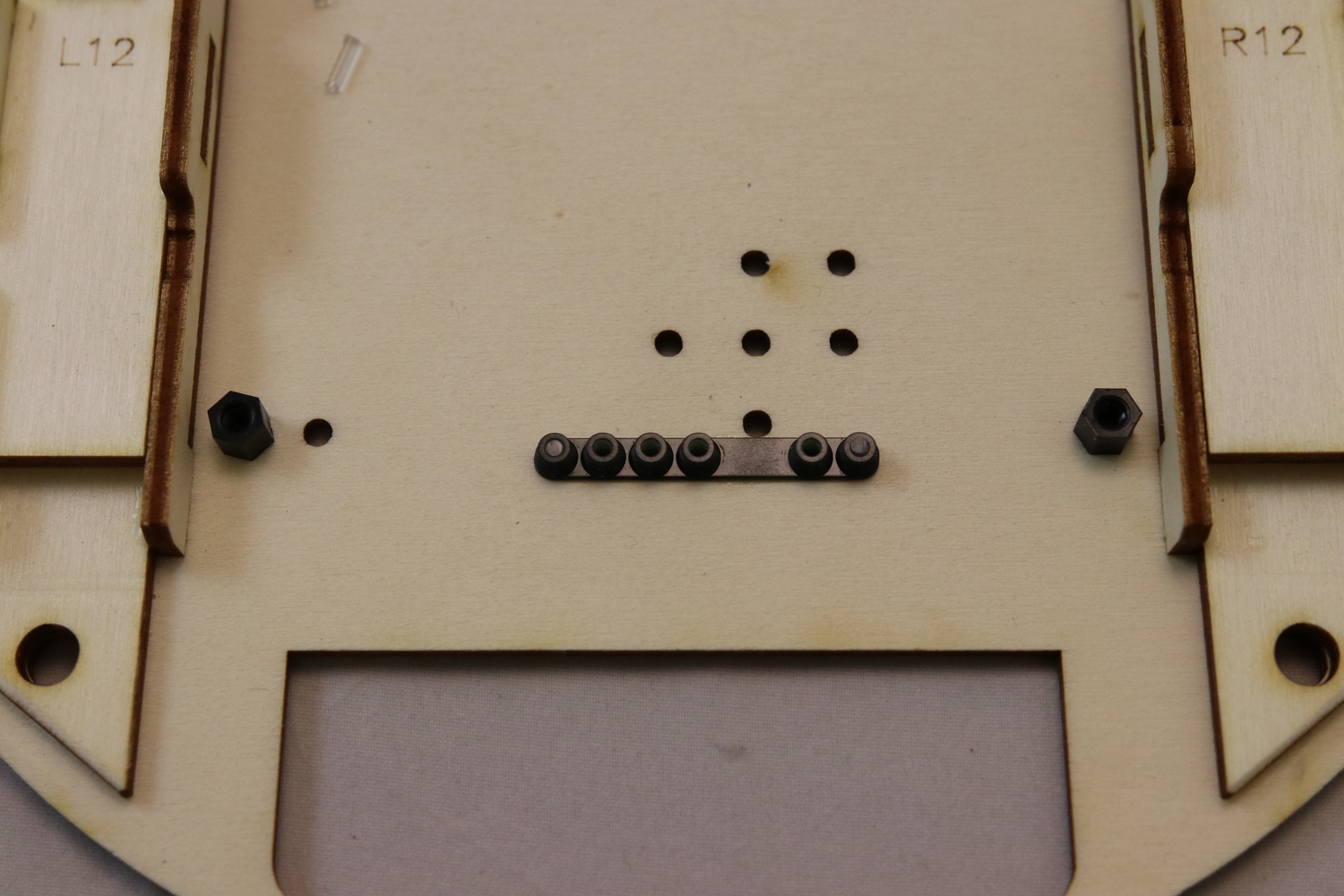
8
Do dírek vložte šroubky pro přesné zapozicování děr a poté destičku zalepte vteřiňákem a vytáhněte šroubky
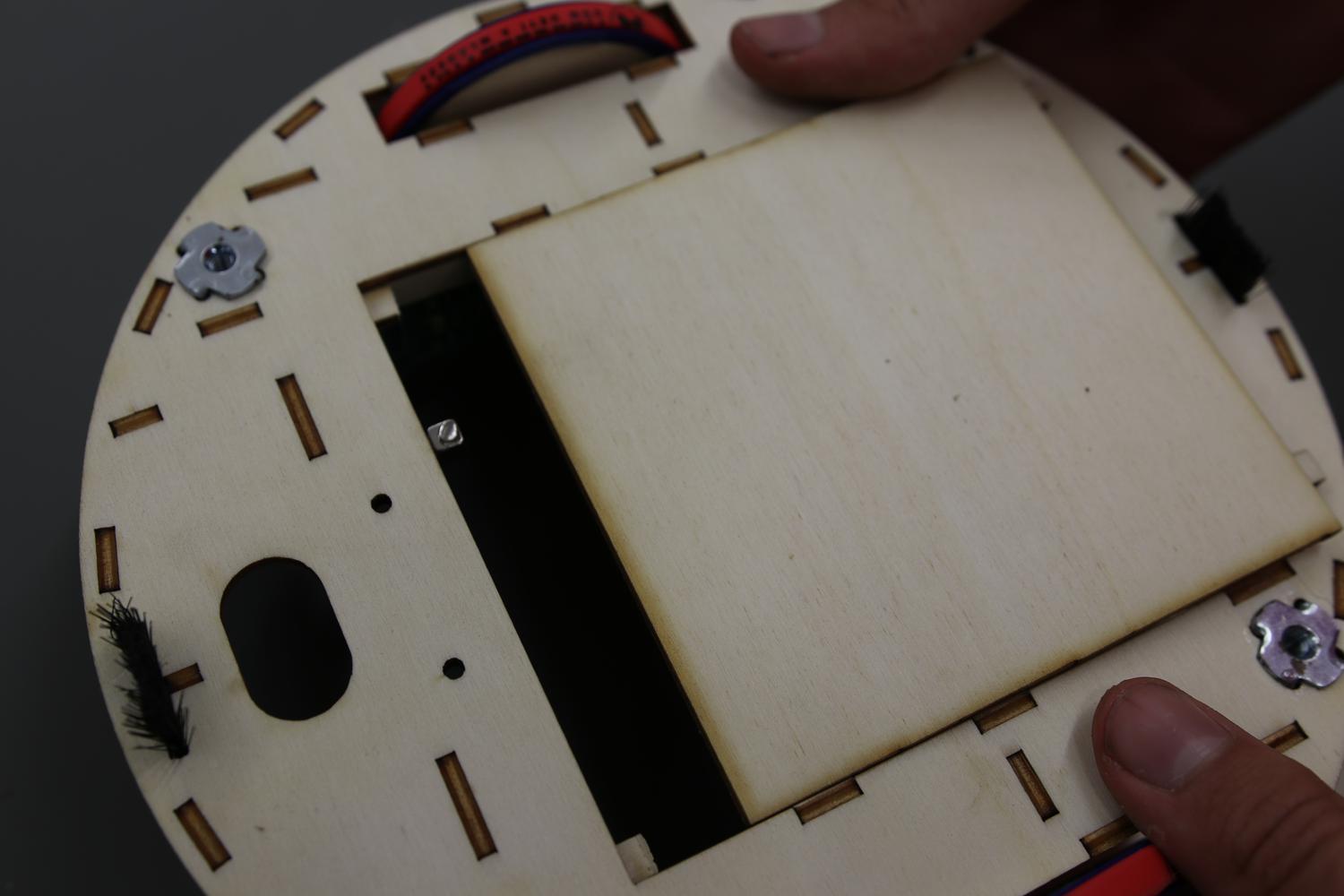
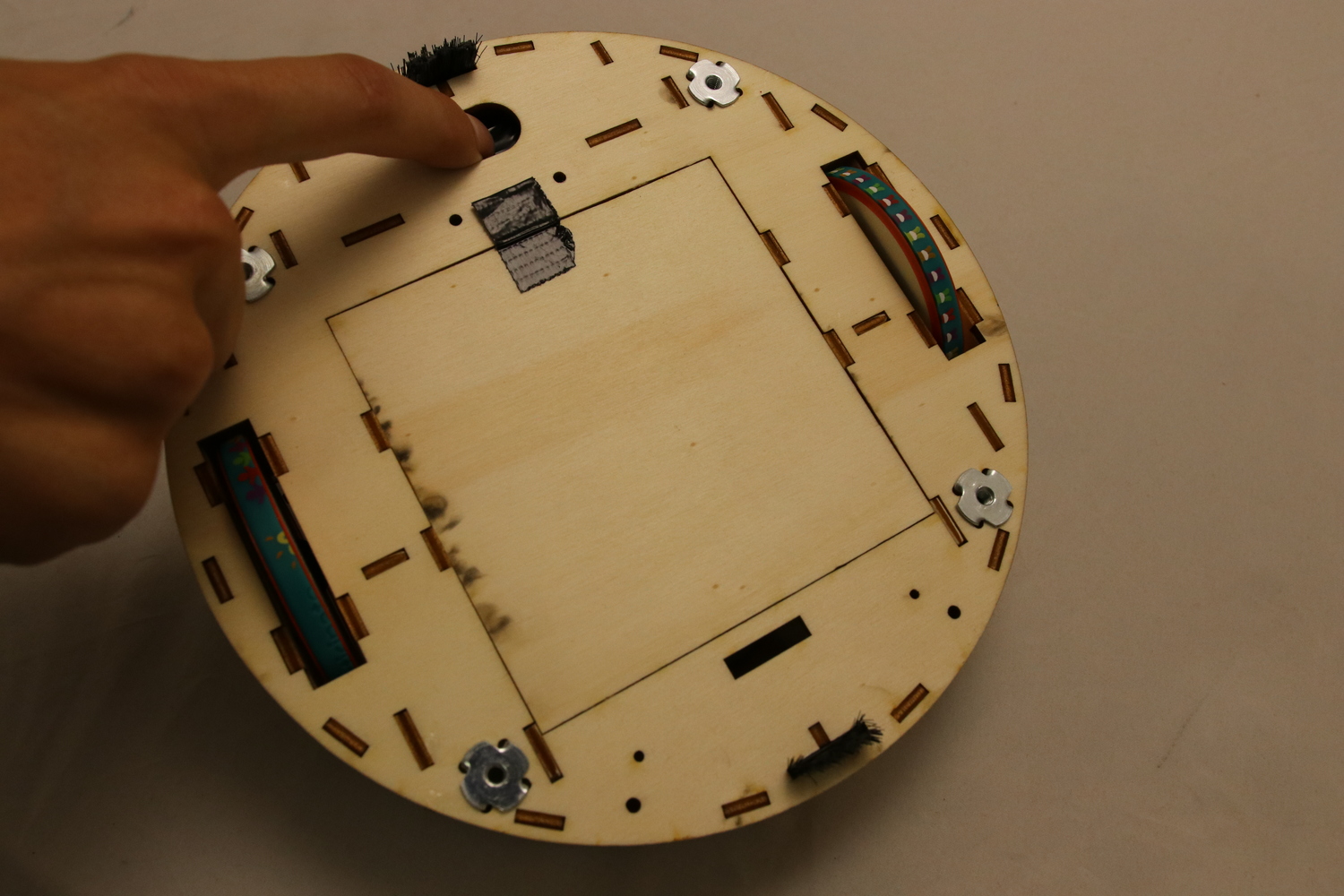
Upevnění kartáčků
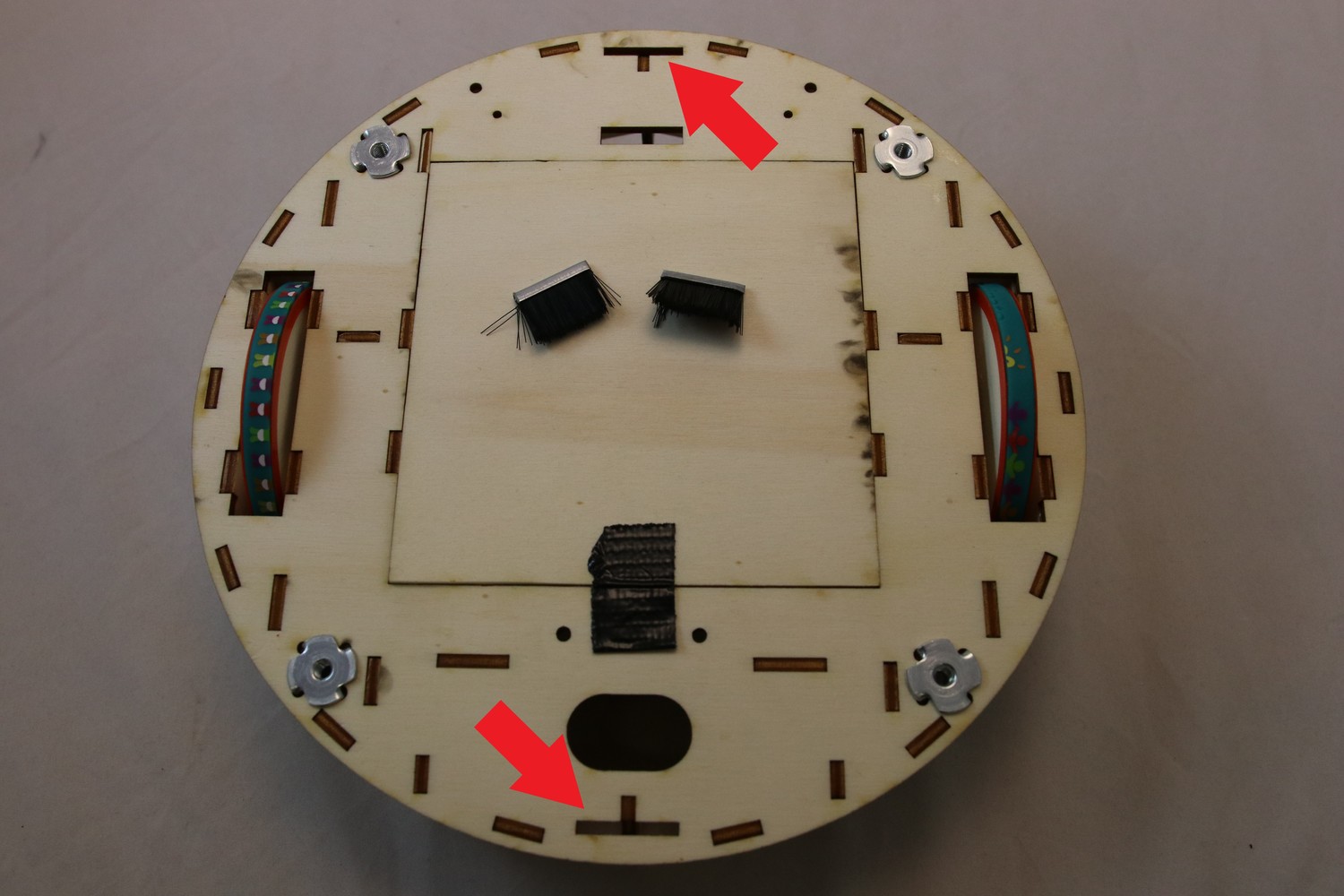
9
Kartáčky zasuňte na místo šipek

10
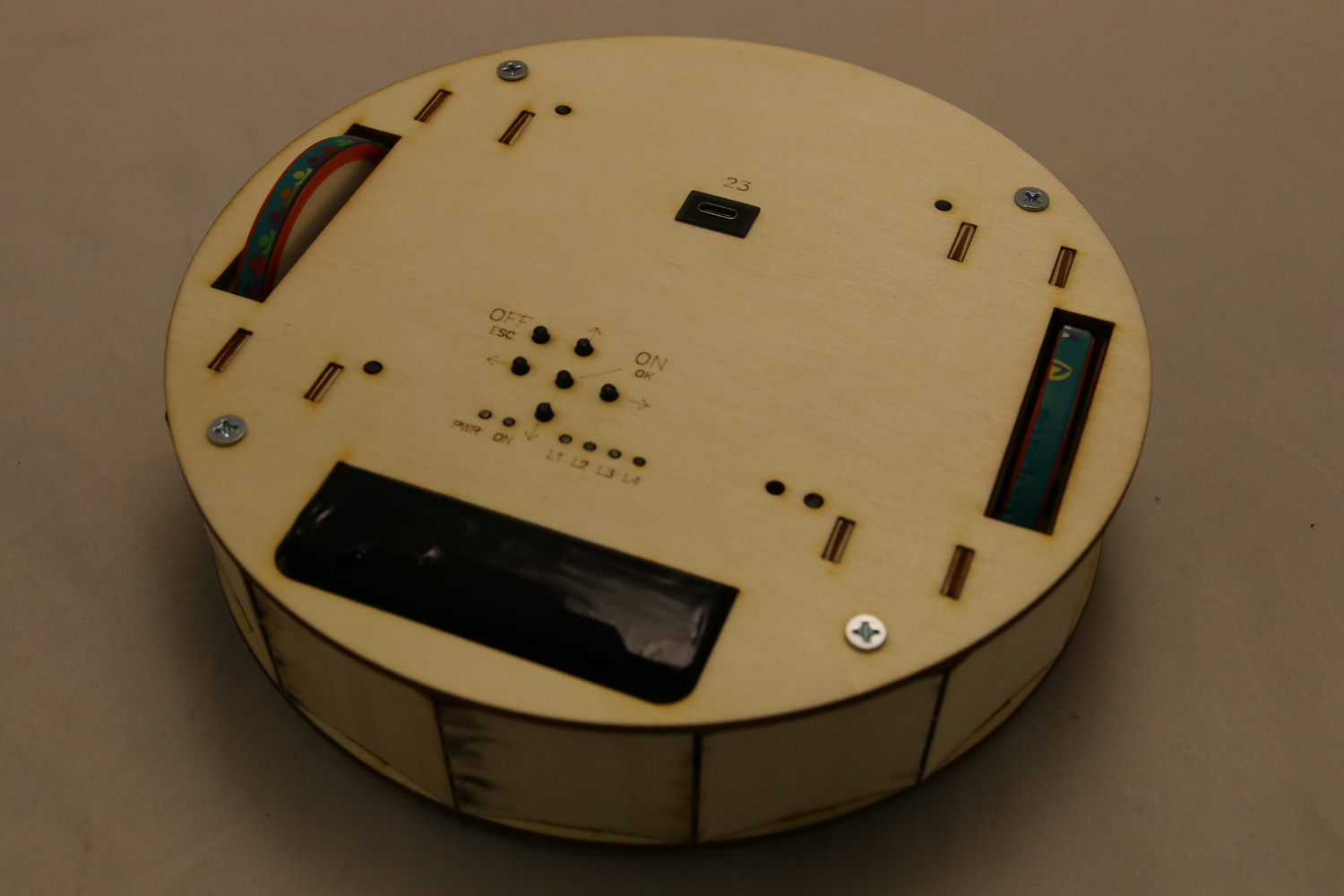
Kompletace paluby
Sloupky pro RBCX
8

9

10

11
12
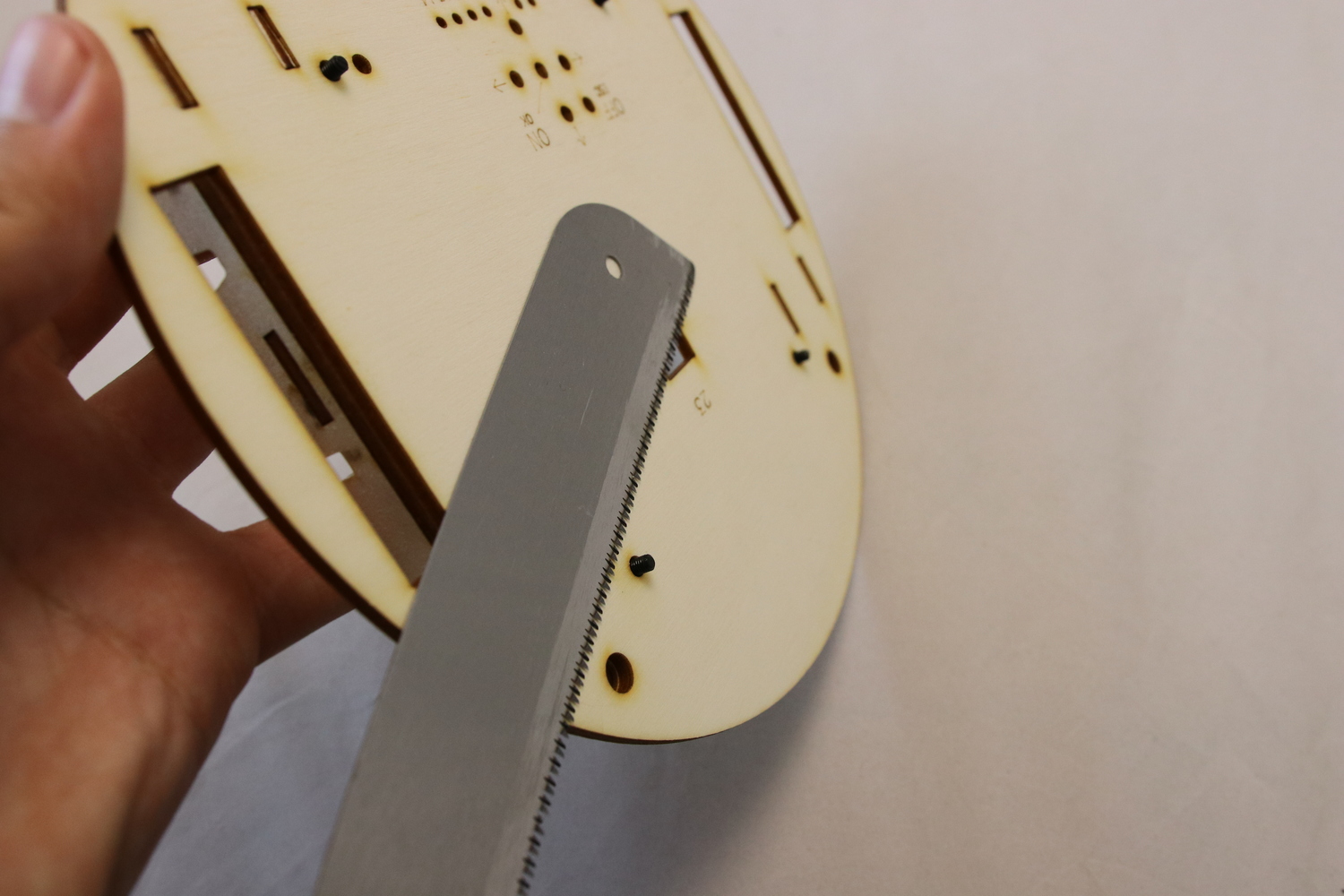
Zařízněte a zabrušte brusnou destičkou
13
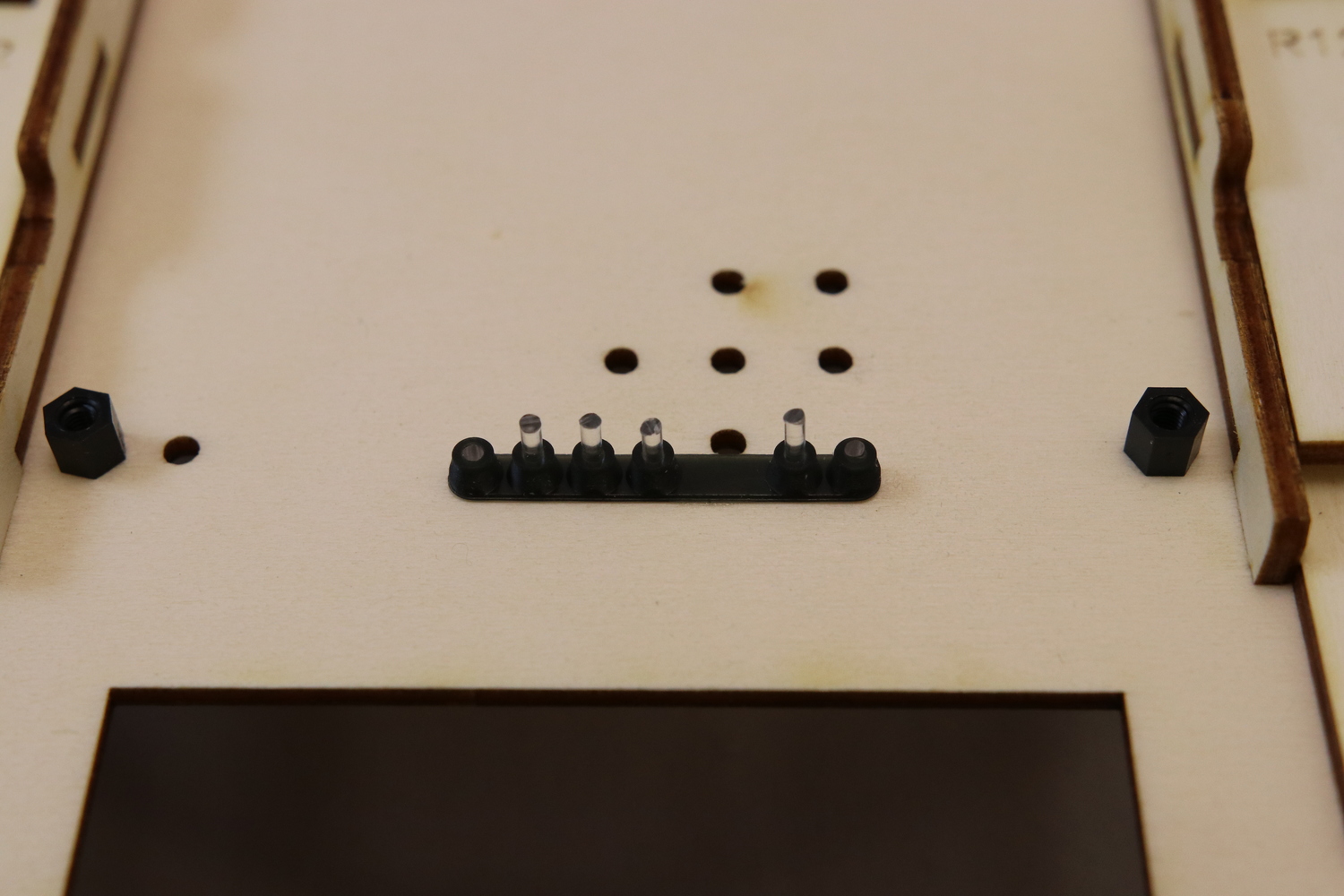
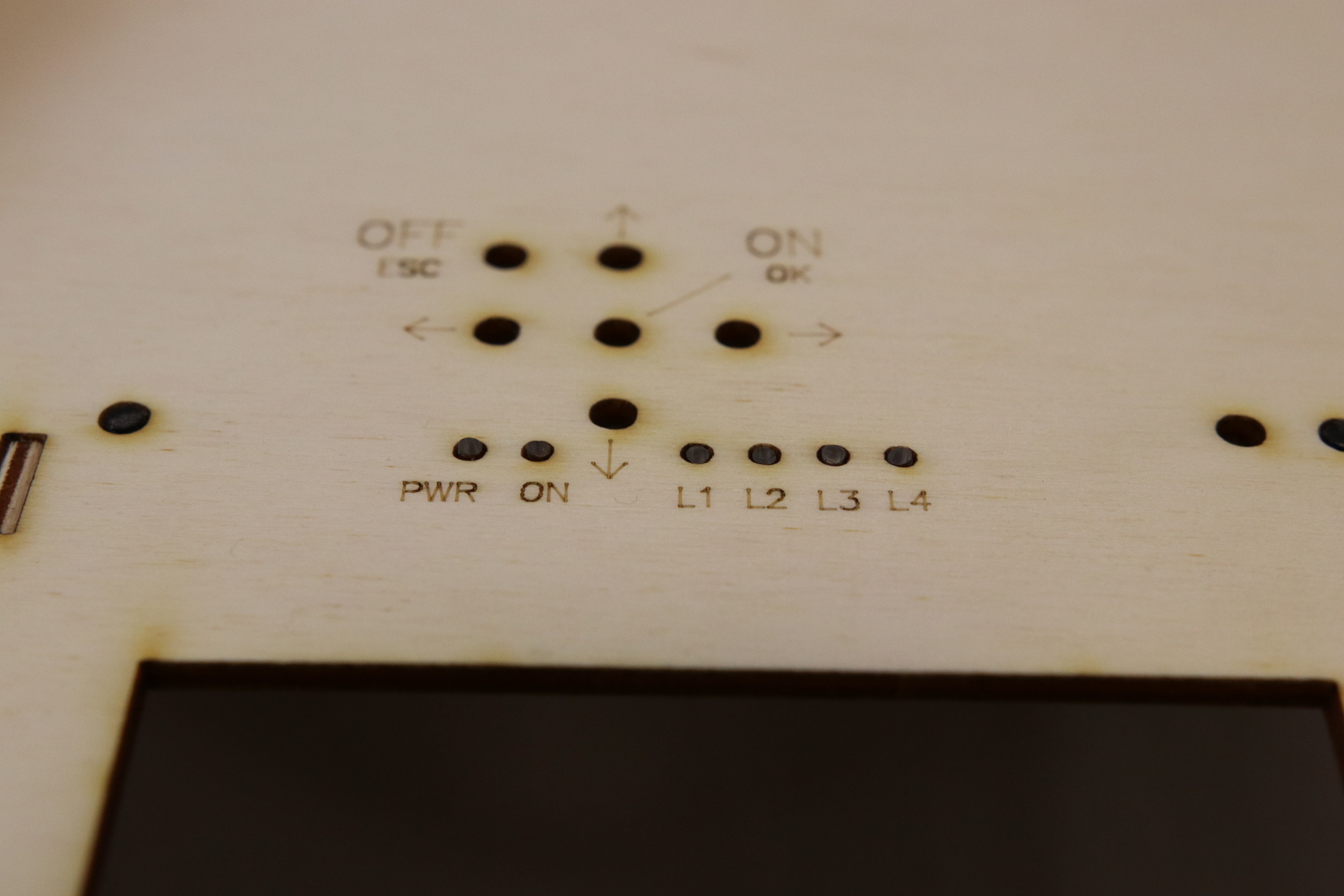
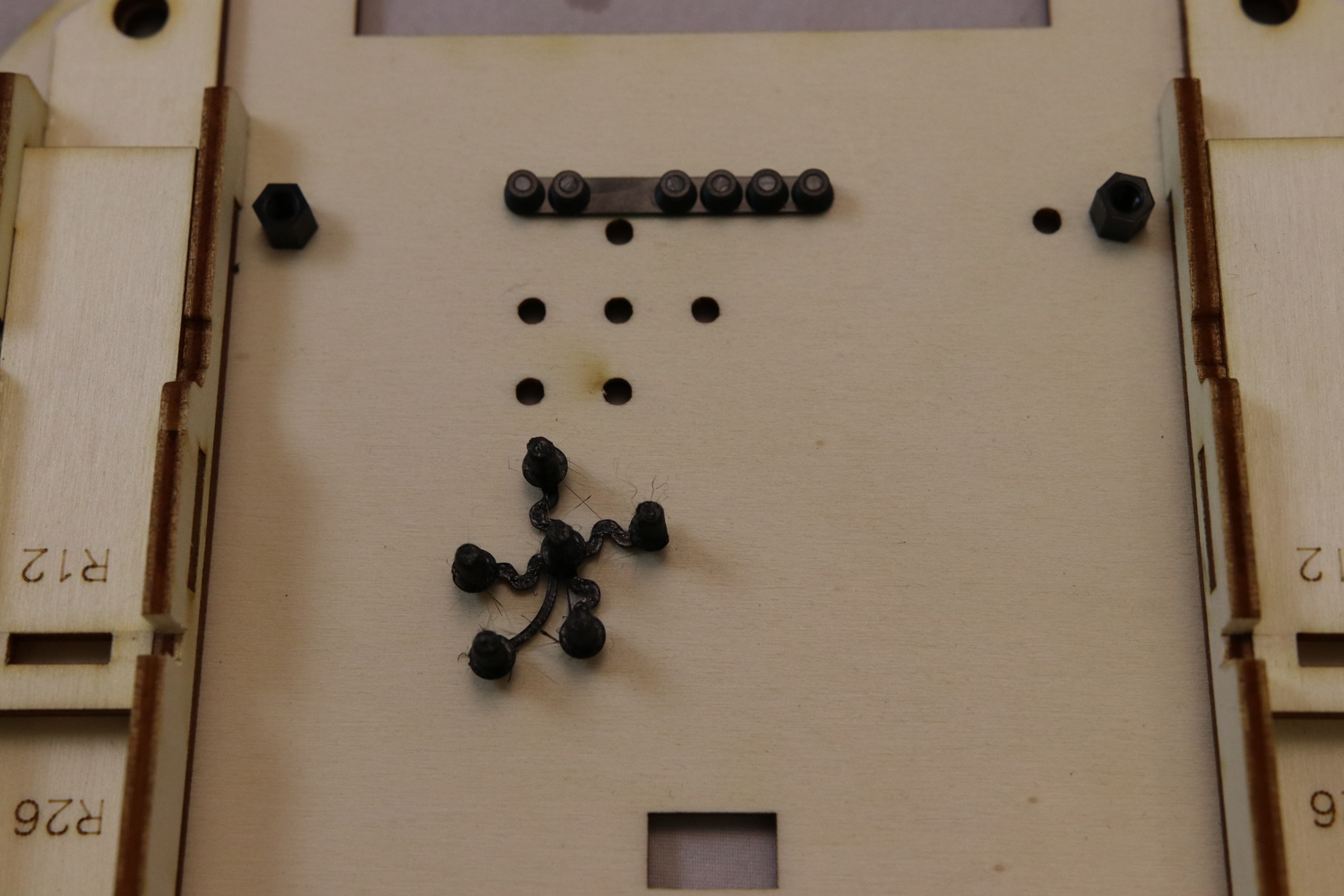
Upevnění světlovodů

14

15
16
17
18
19
20

21
22
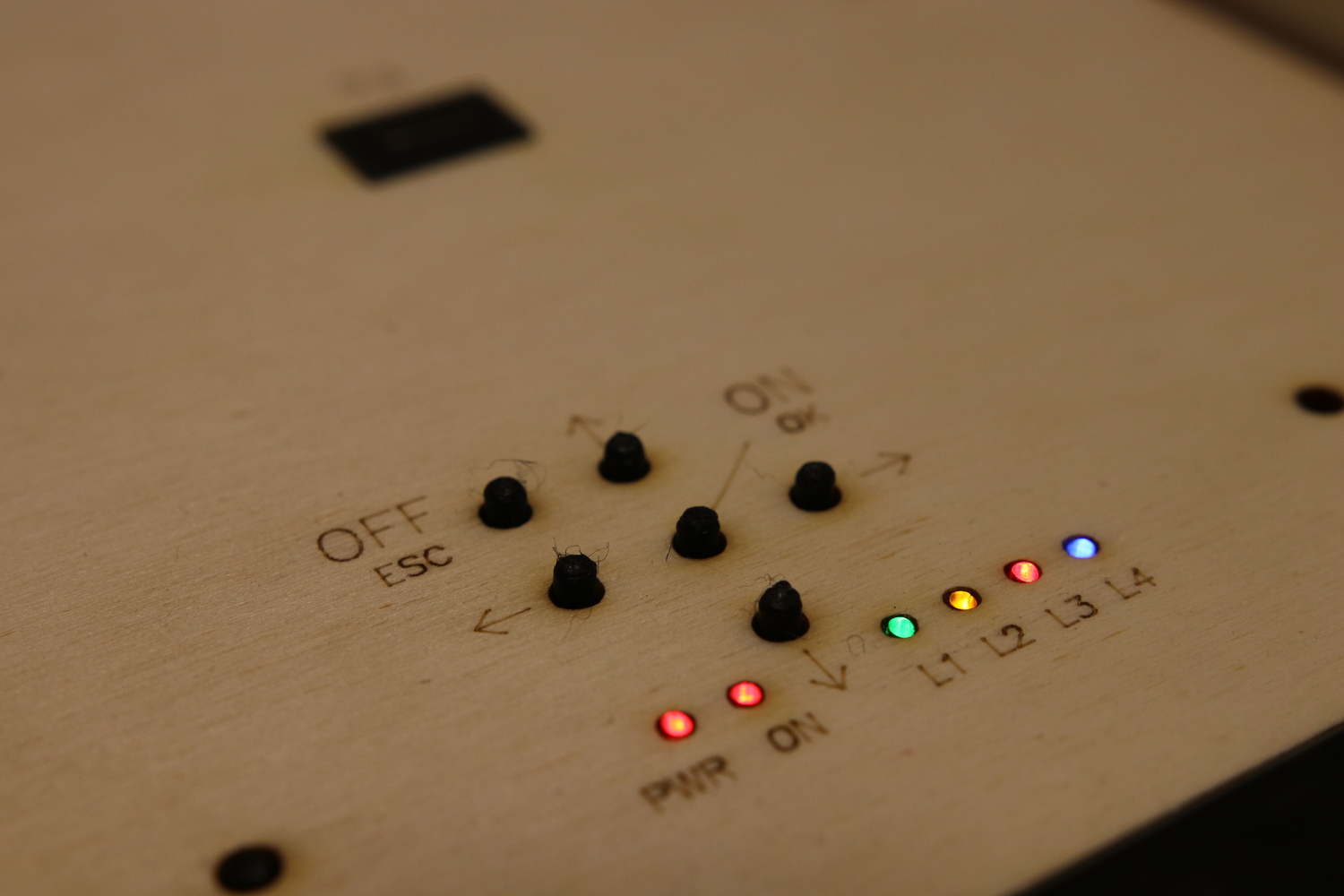
23
Takhle krásně to svítí :-)
Vložení hmatníku
24

25
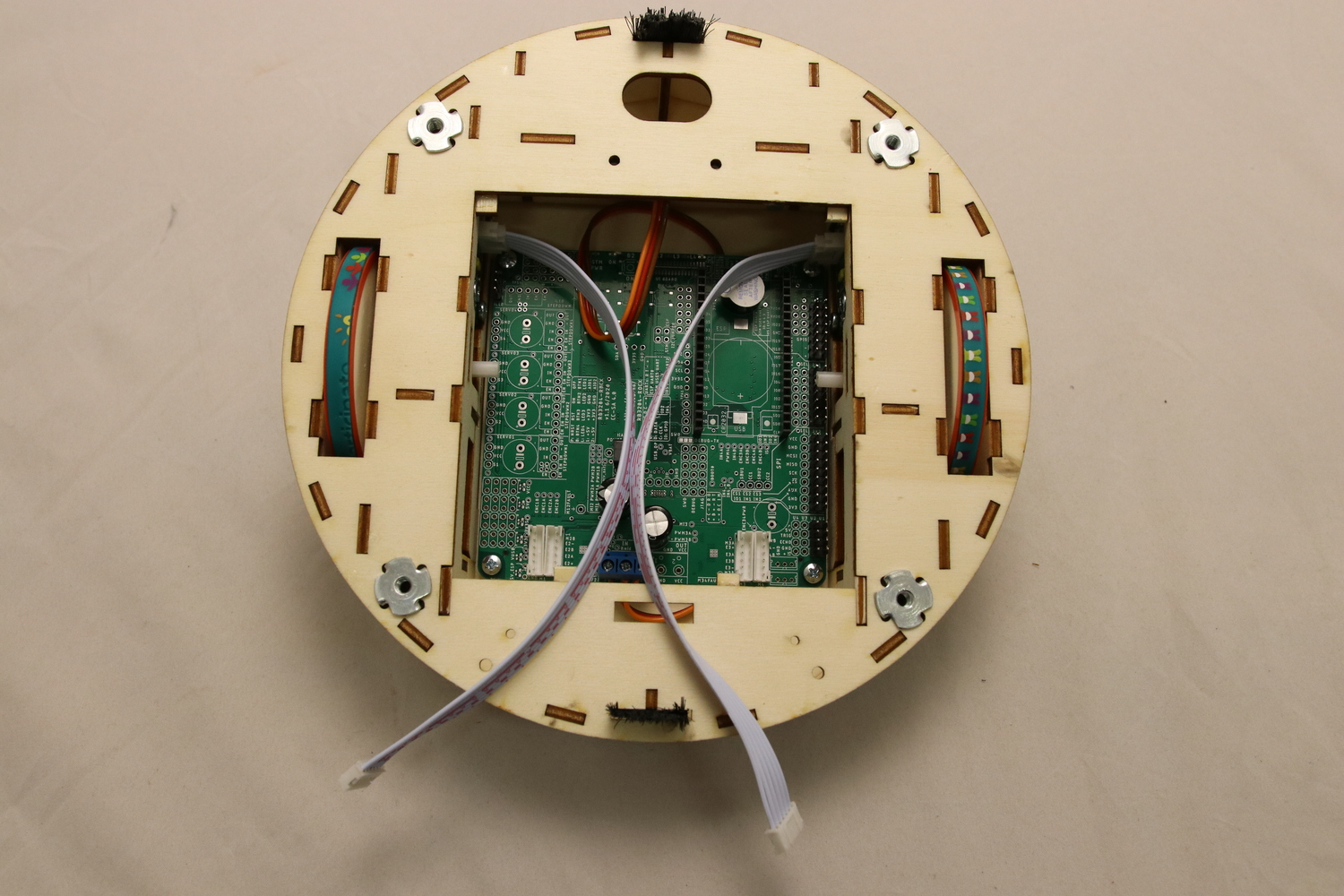
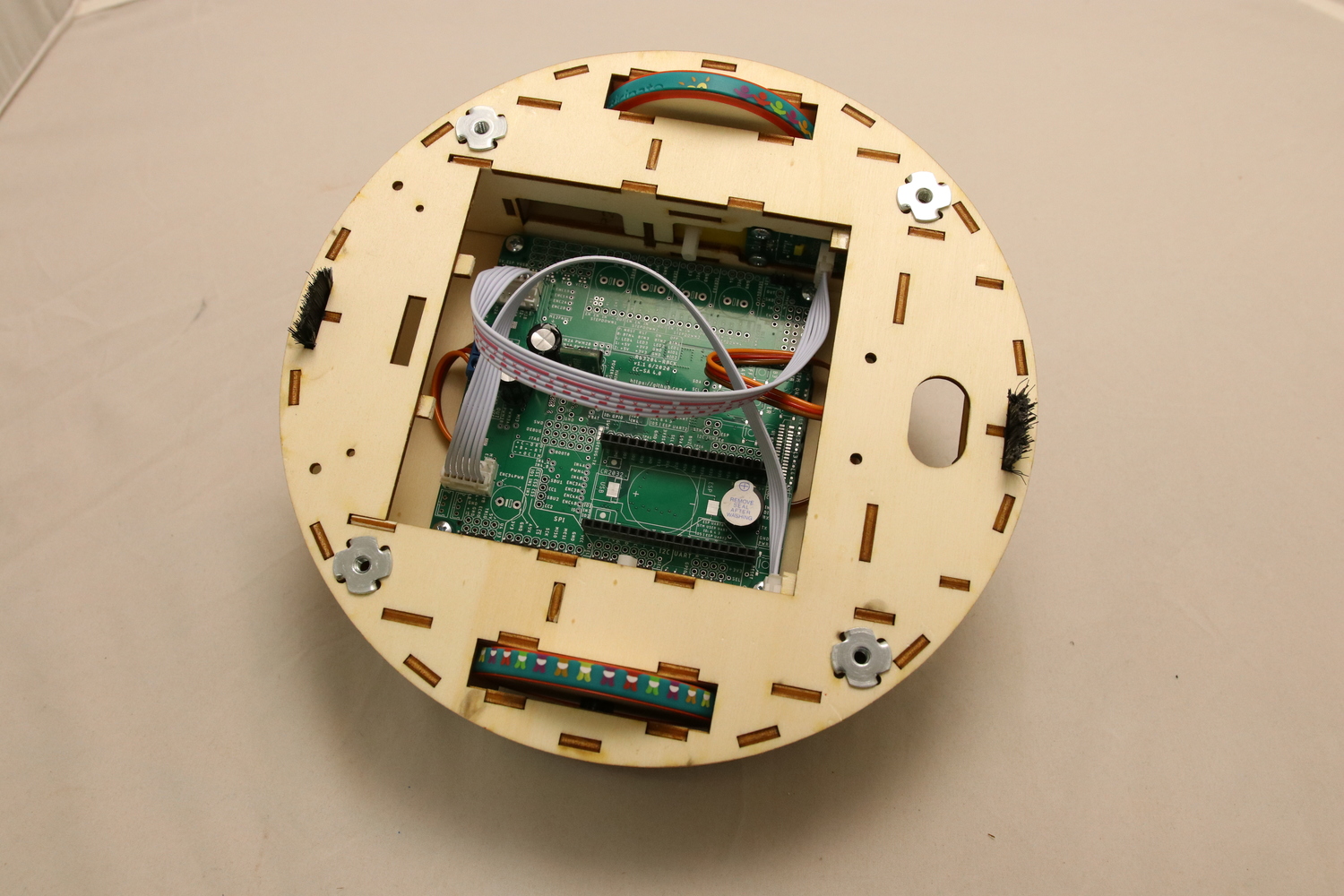
Upevnění RBCX
26
Pomocí šroubů M3x5 přišroubujte RBCX
27
28
Kryt na USB C
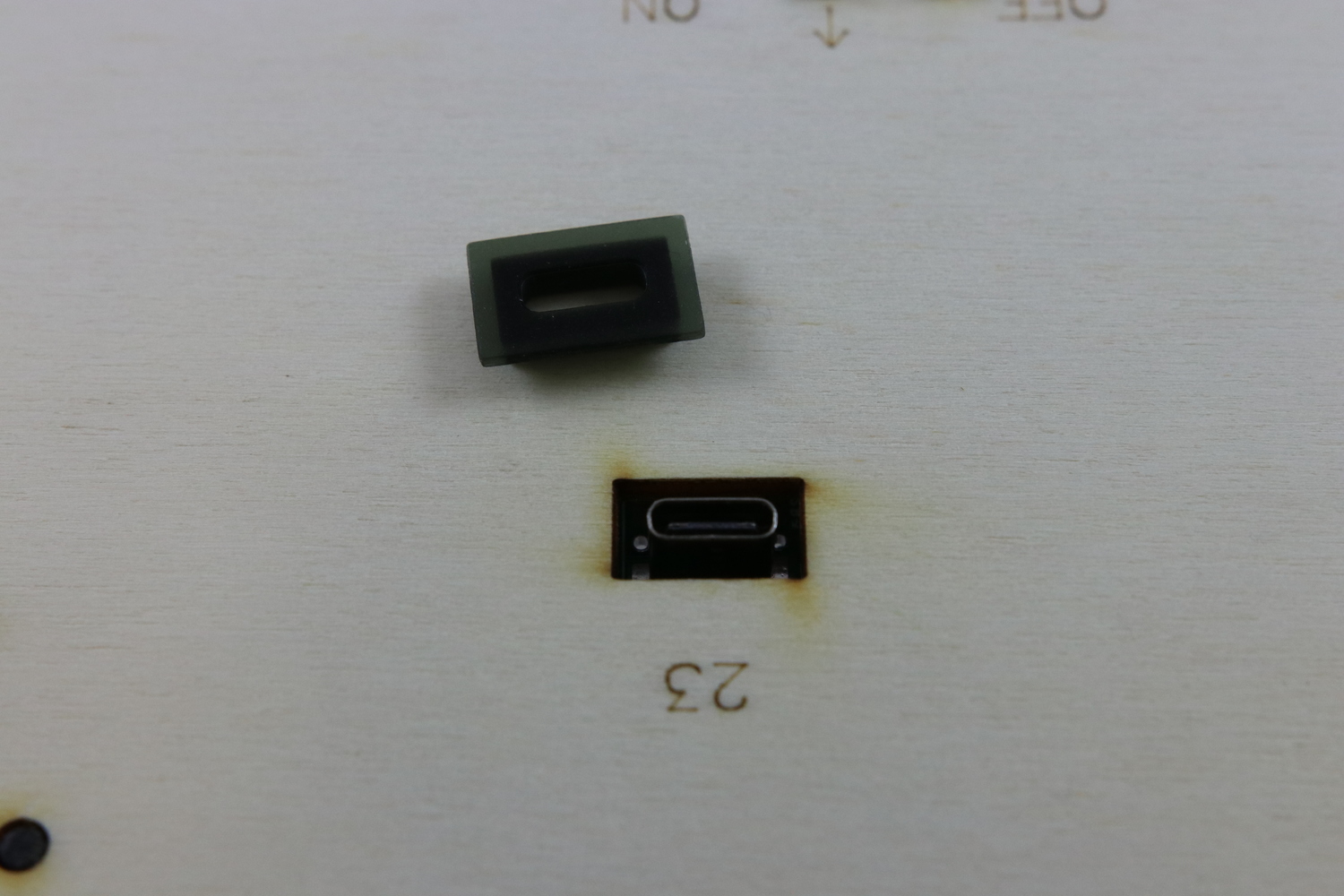
29
30
Na plastový dílek kápněte vteřiňákem a přileppte jej

31
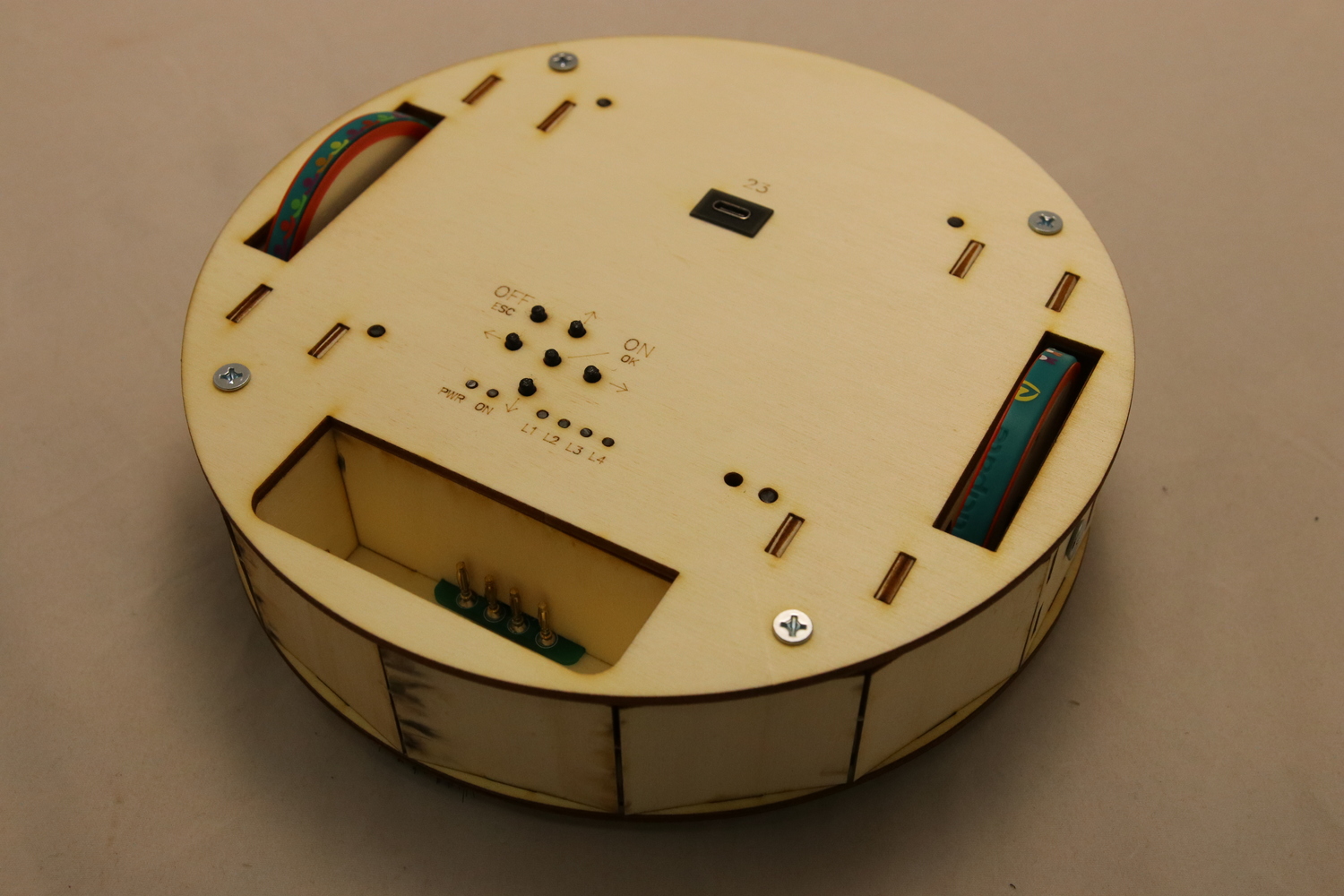
Připojení napájení
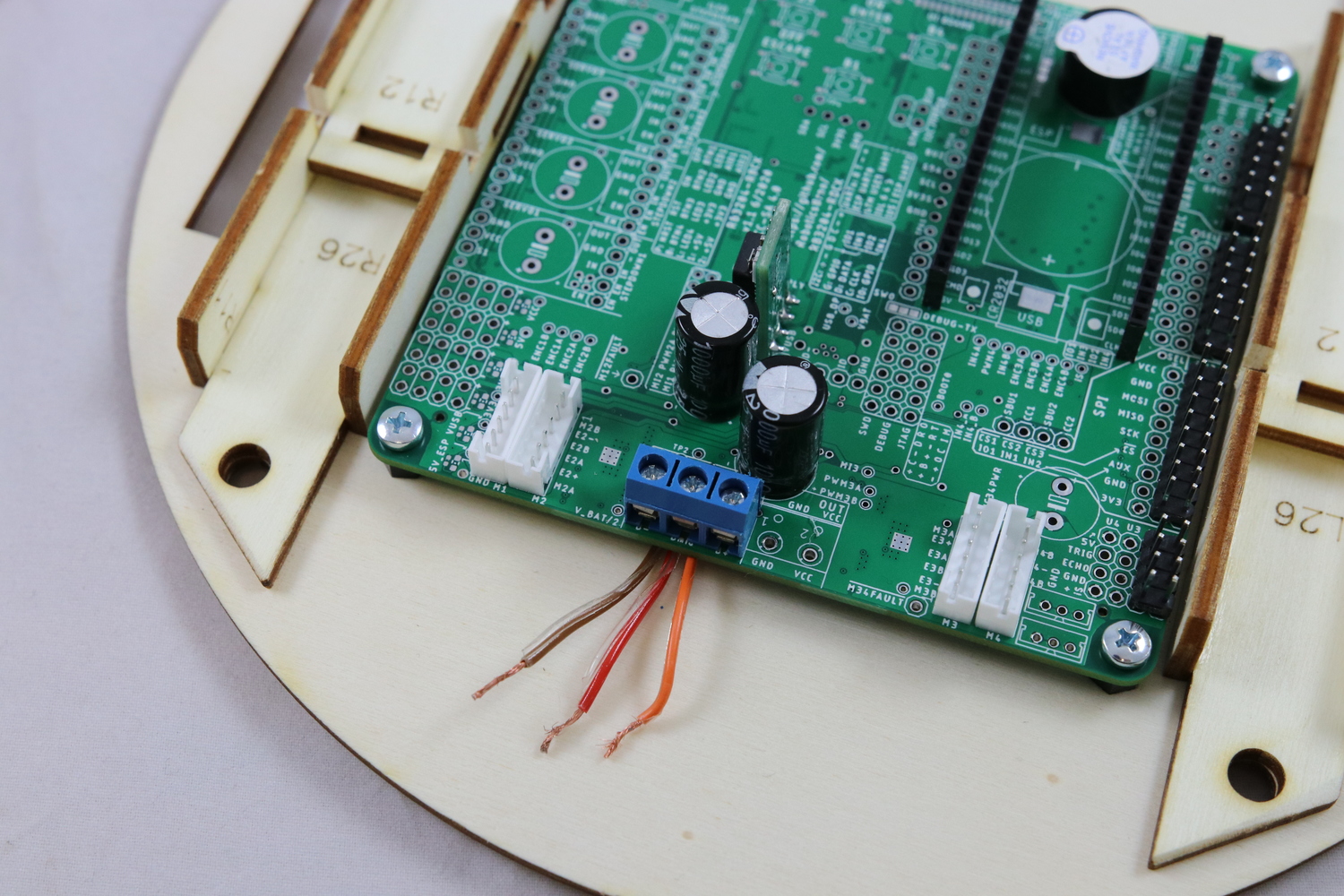
32
Protáhněte kabel pod deskou
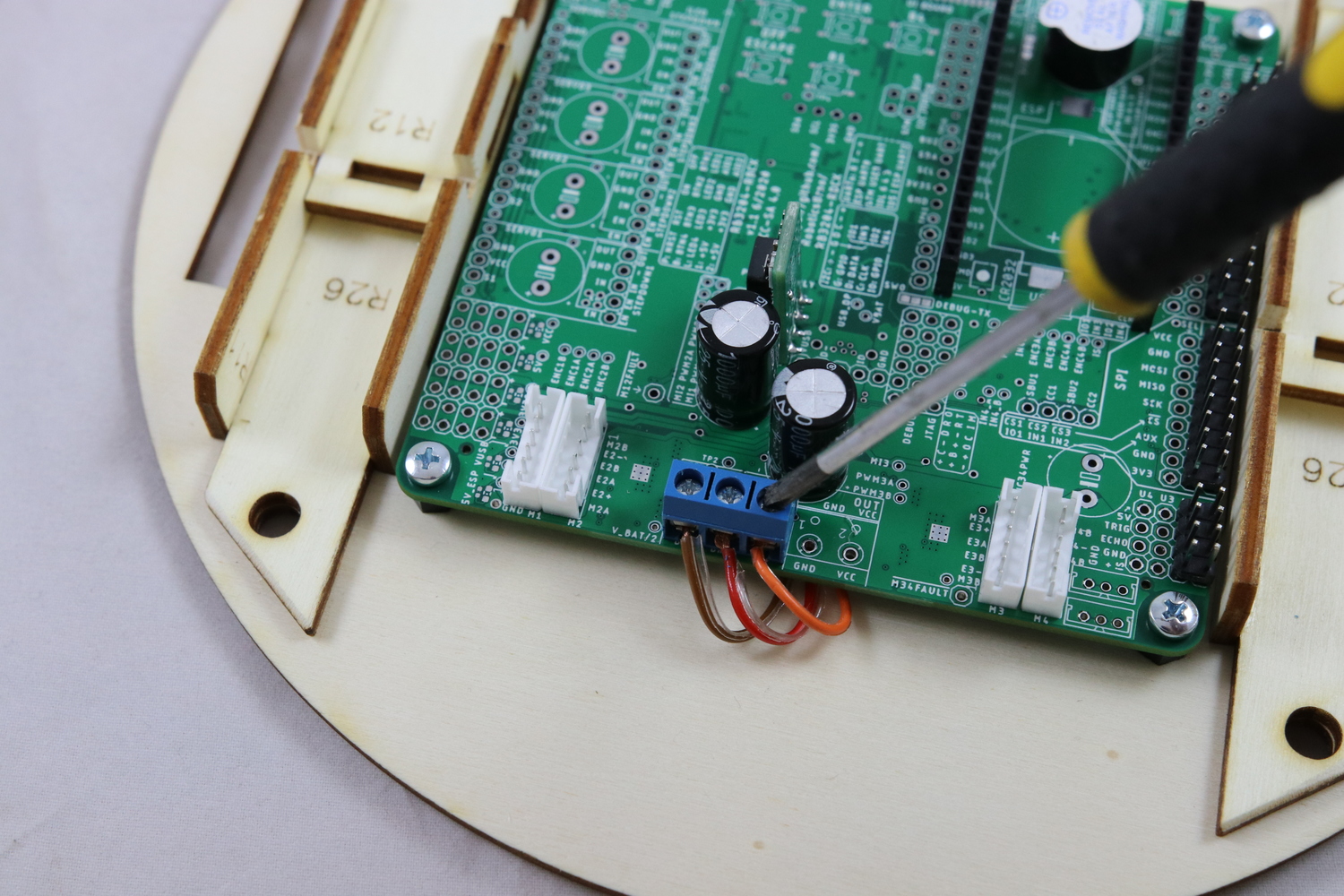
33
Přišroubujte dráty do svorkovnice
Hnědý drát na B-, červený na Bmid a oranžový na B+
Kompletace celého robota
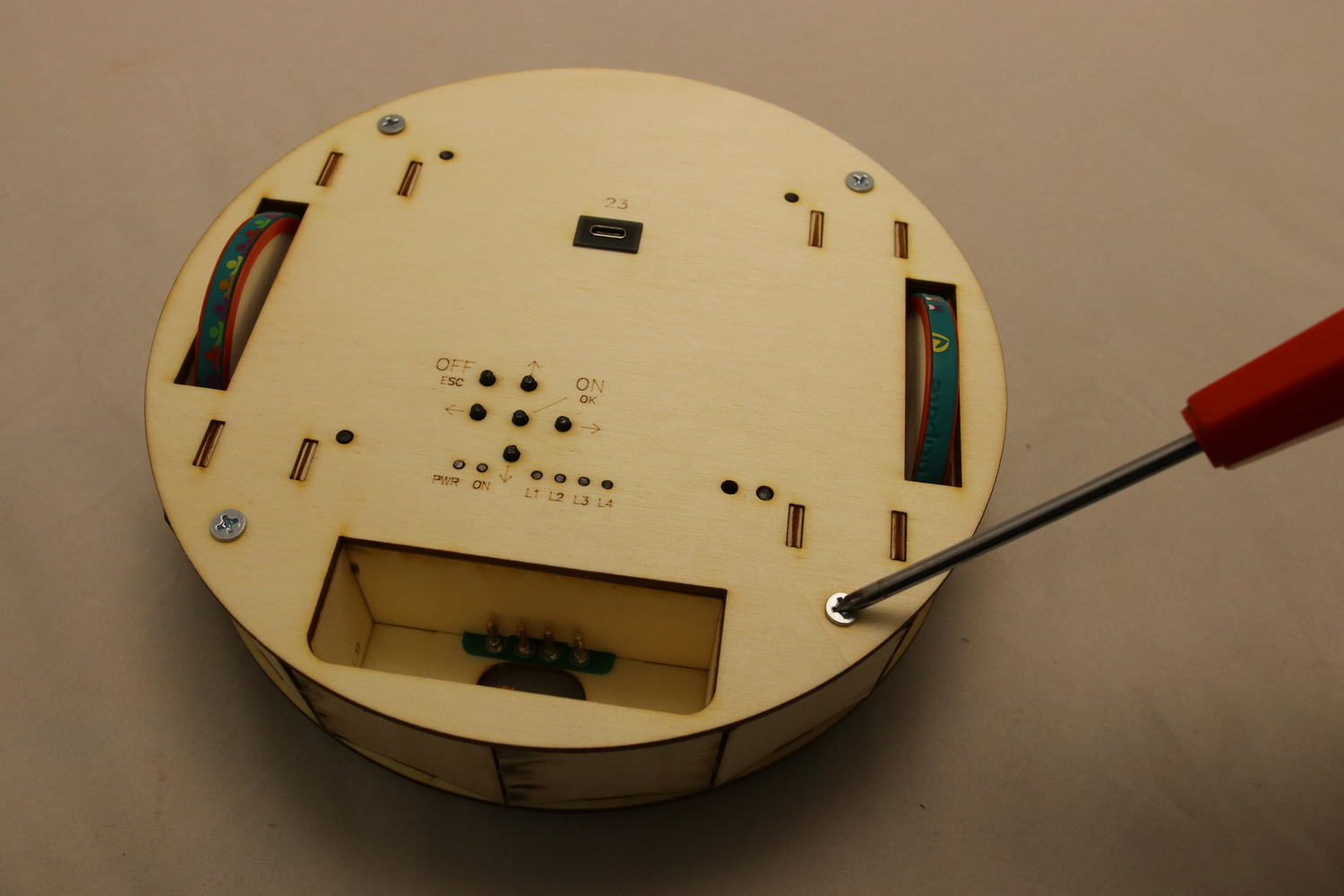
Sešroubování paluby

1
Pomocí šroubů M4x45 přišroubujte palubu
2
3
Zapojení motorů
4
Připojte motory do konektorů M1 a M4
5
Připojení baterky
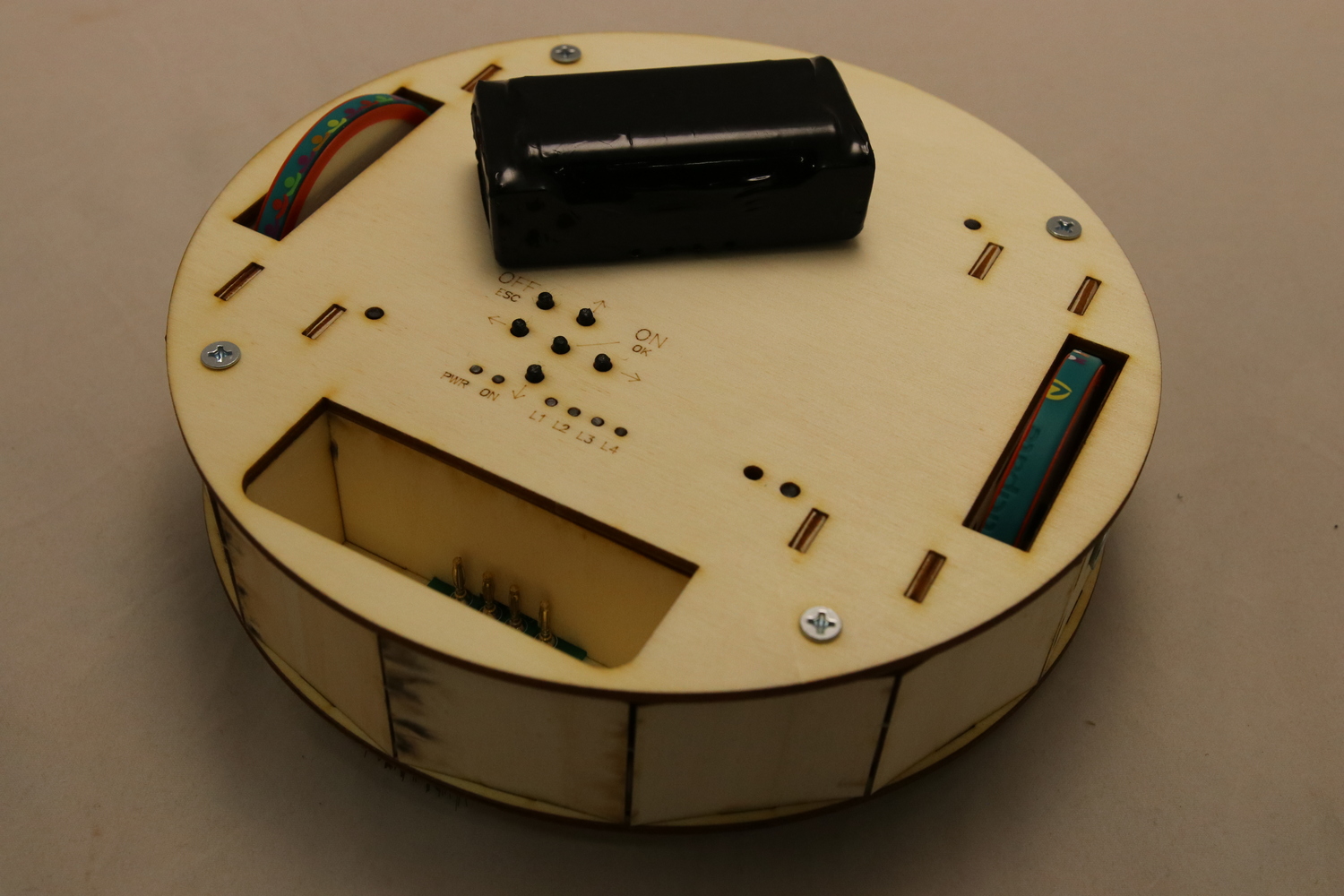
6
Připojení baterky

7
8
Odpojení baterky
9
Odpjení baterky
10
Držáky ultrazvukových senzorů
Aneb ultradržáky ultrasonických ultrasenzorů. Díky nim budeme moci zjišťovat ultrapozici naší ultrarobotky v ultraprostoru. :-)

1

2

3
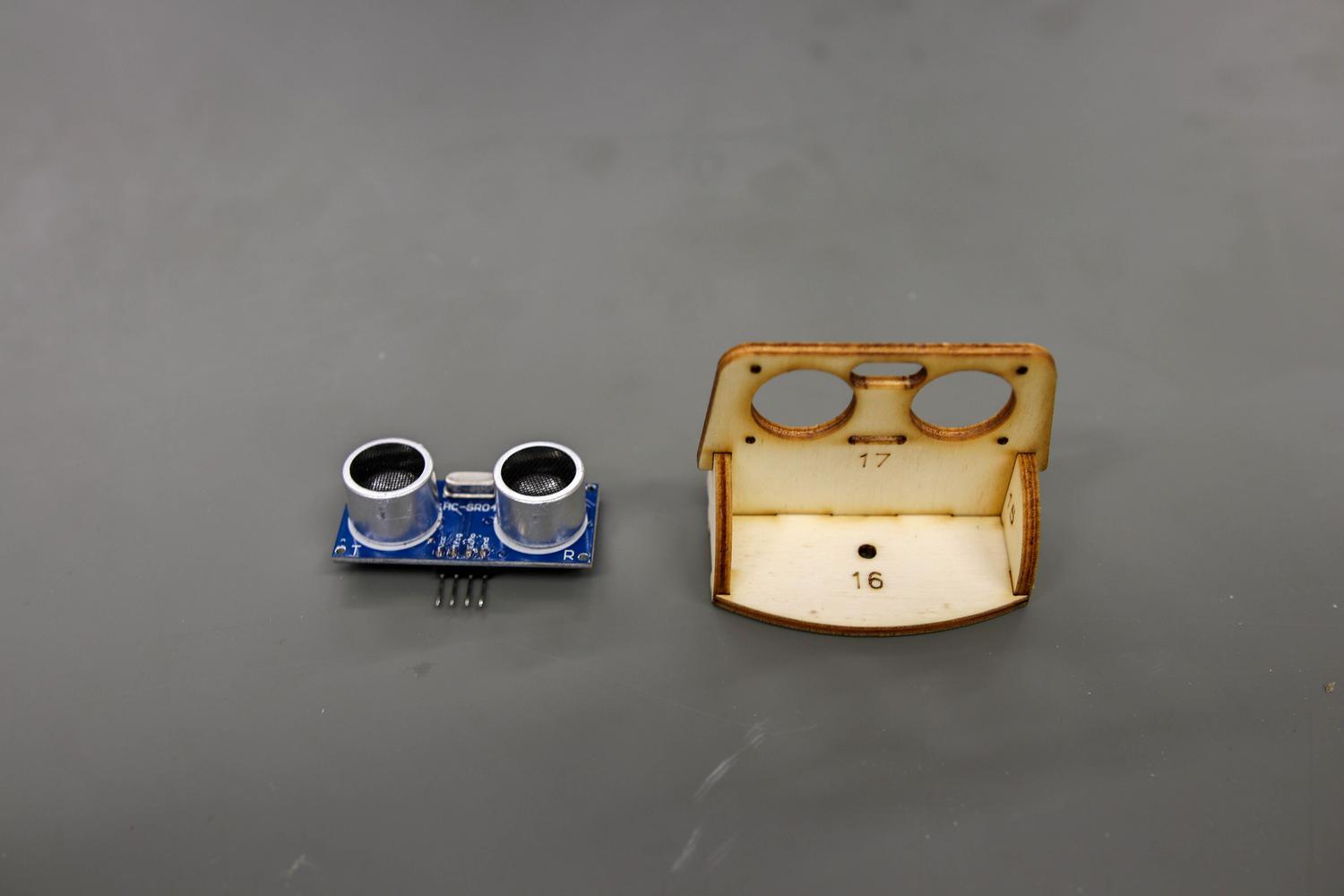
4

5

6
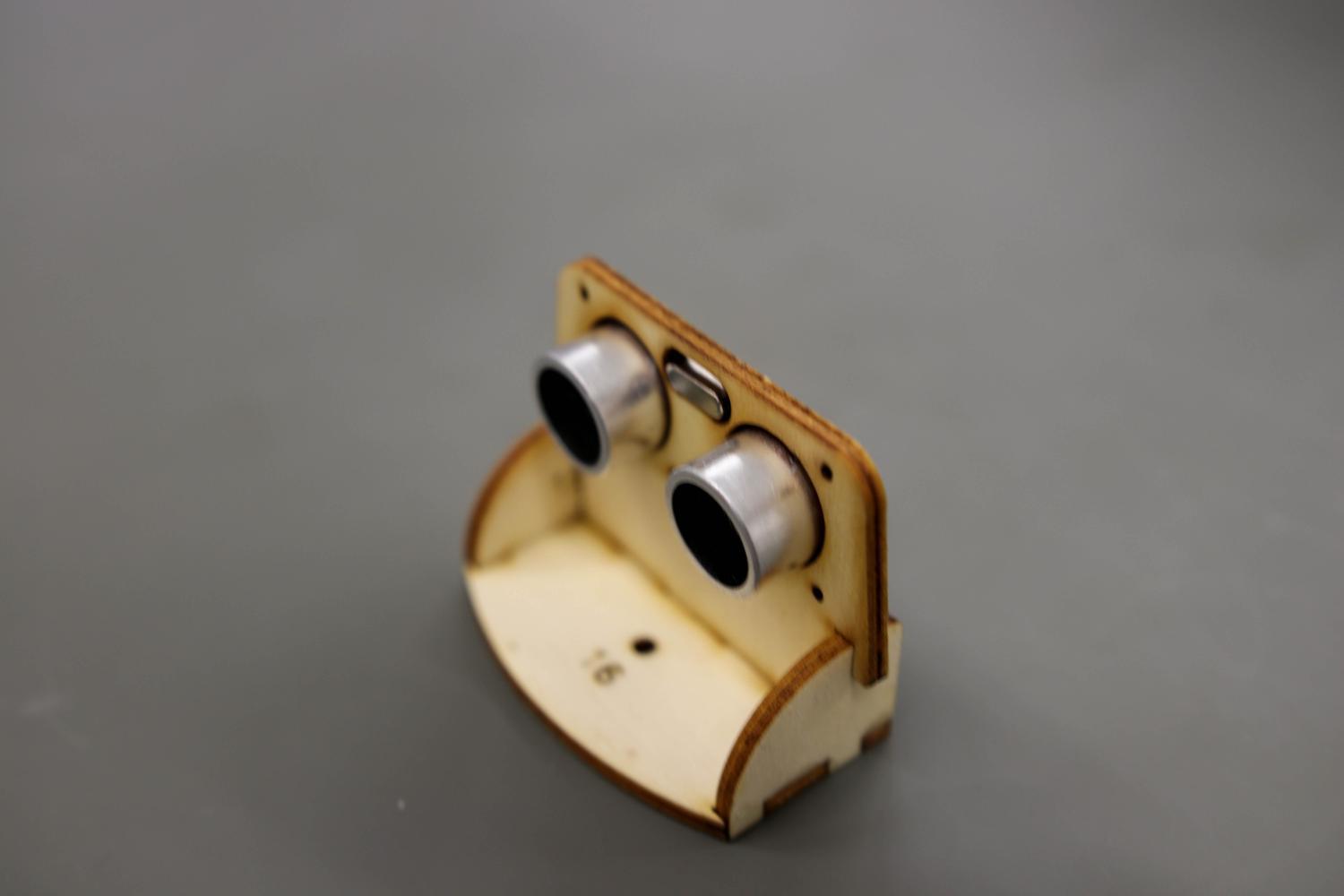
7
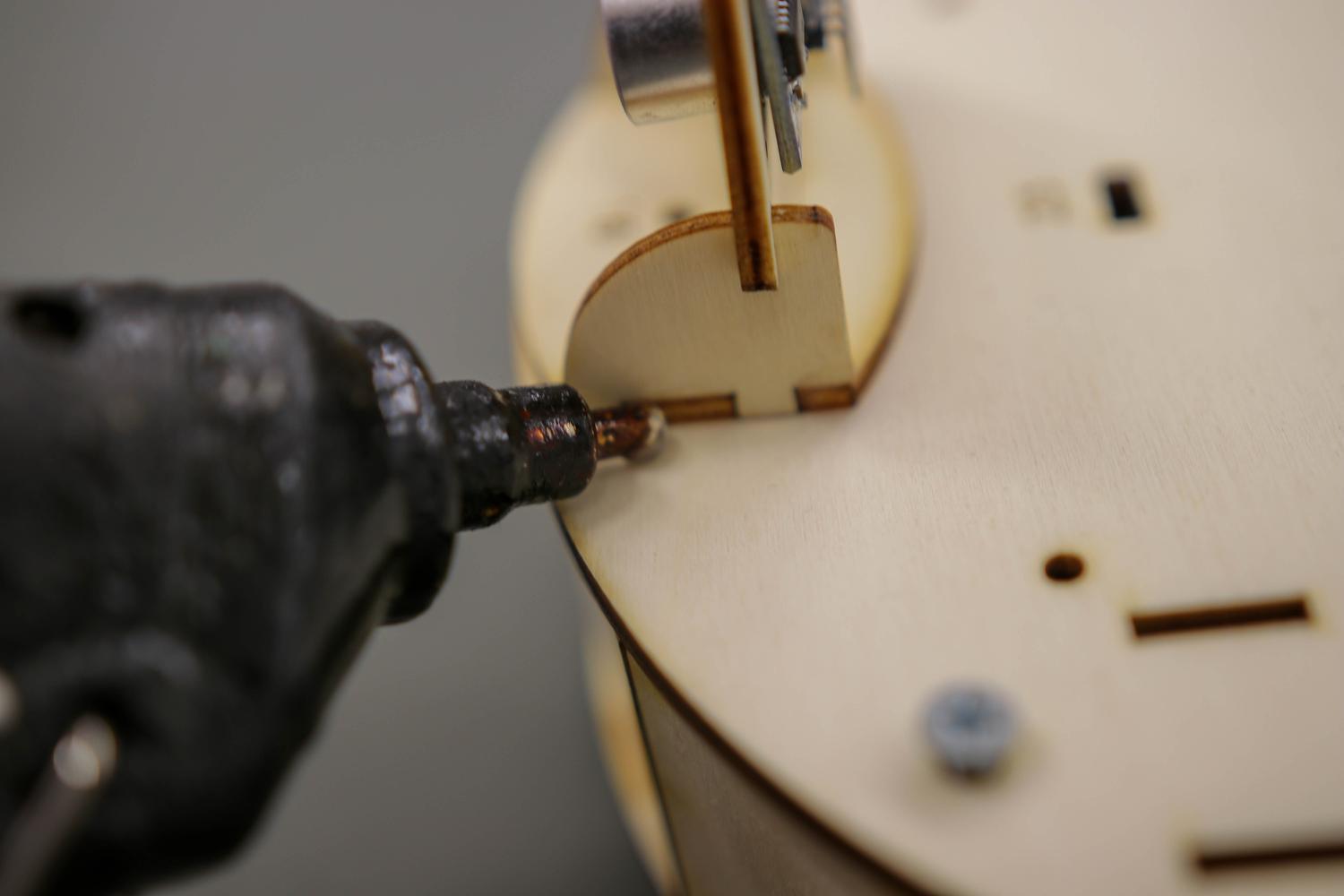
Montáž na Robotčinu palubu
Nyní připevníme ultrazvukové senzory na Robotku. Budeme na to potřebovat tavnou pistoli.
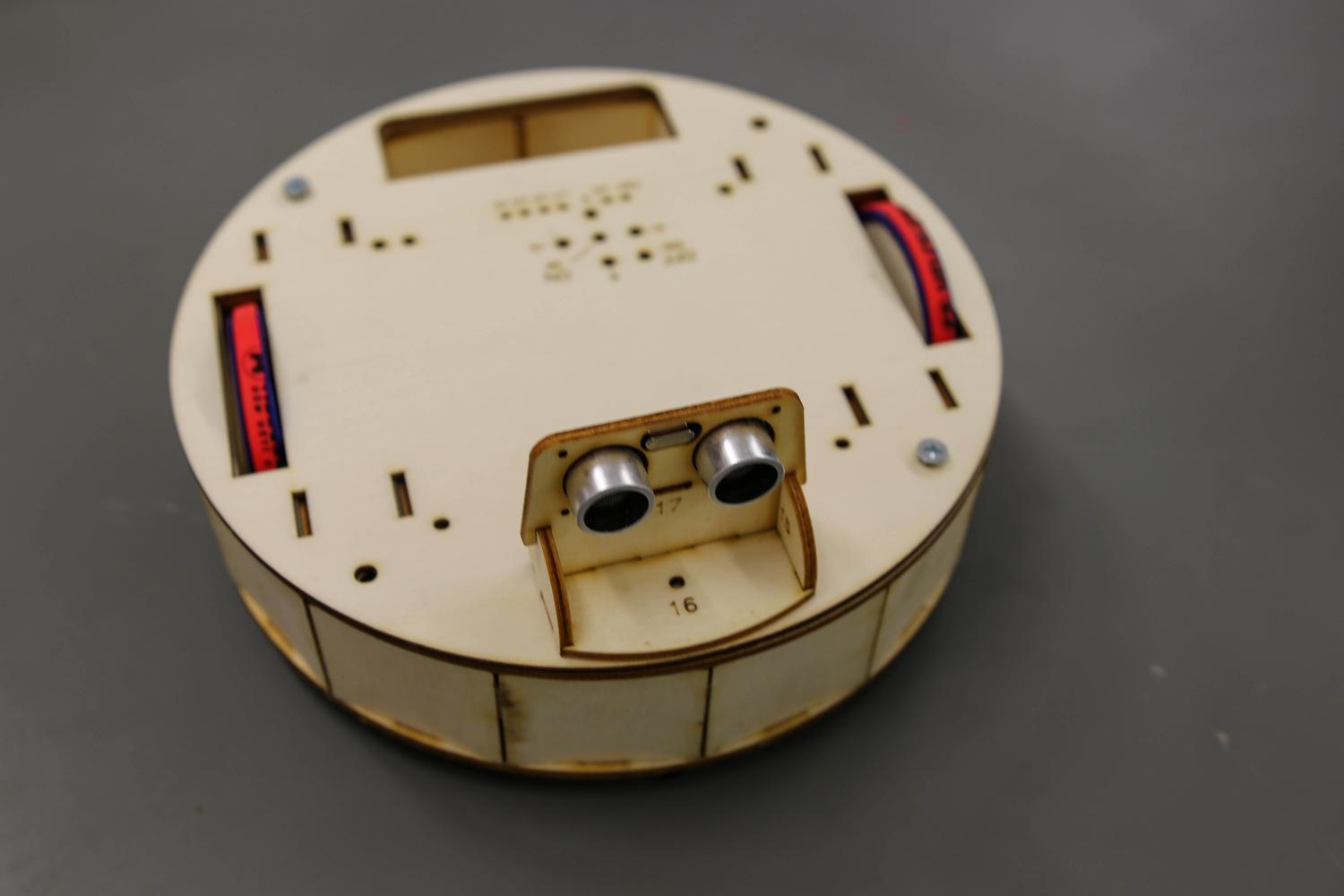
8

9
10
Senzory a příslušenství
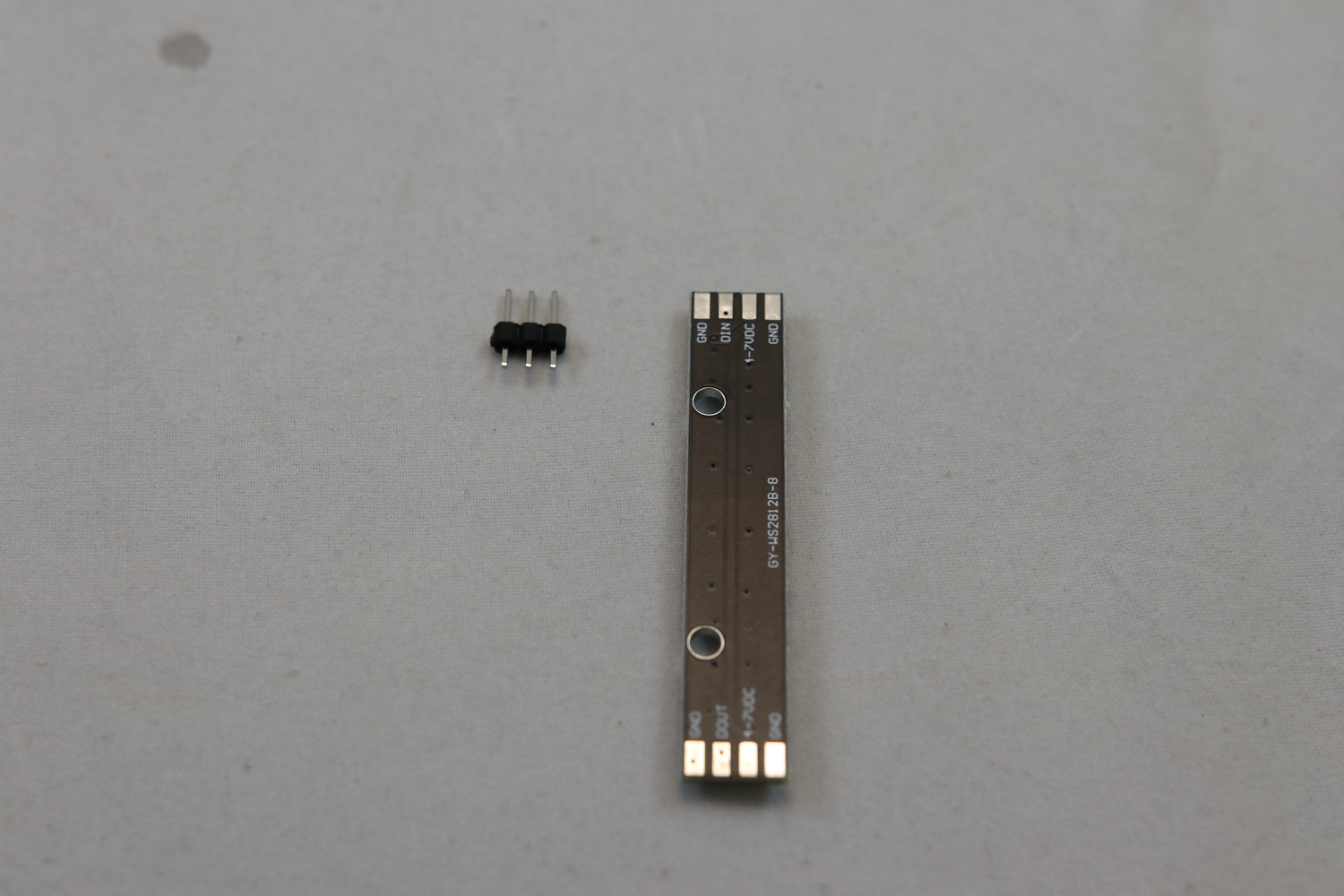
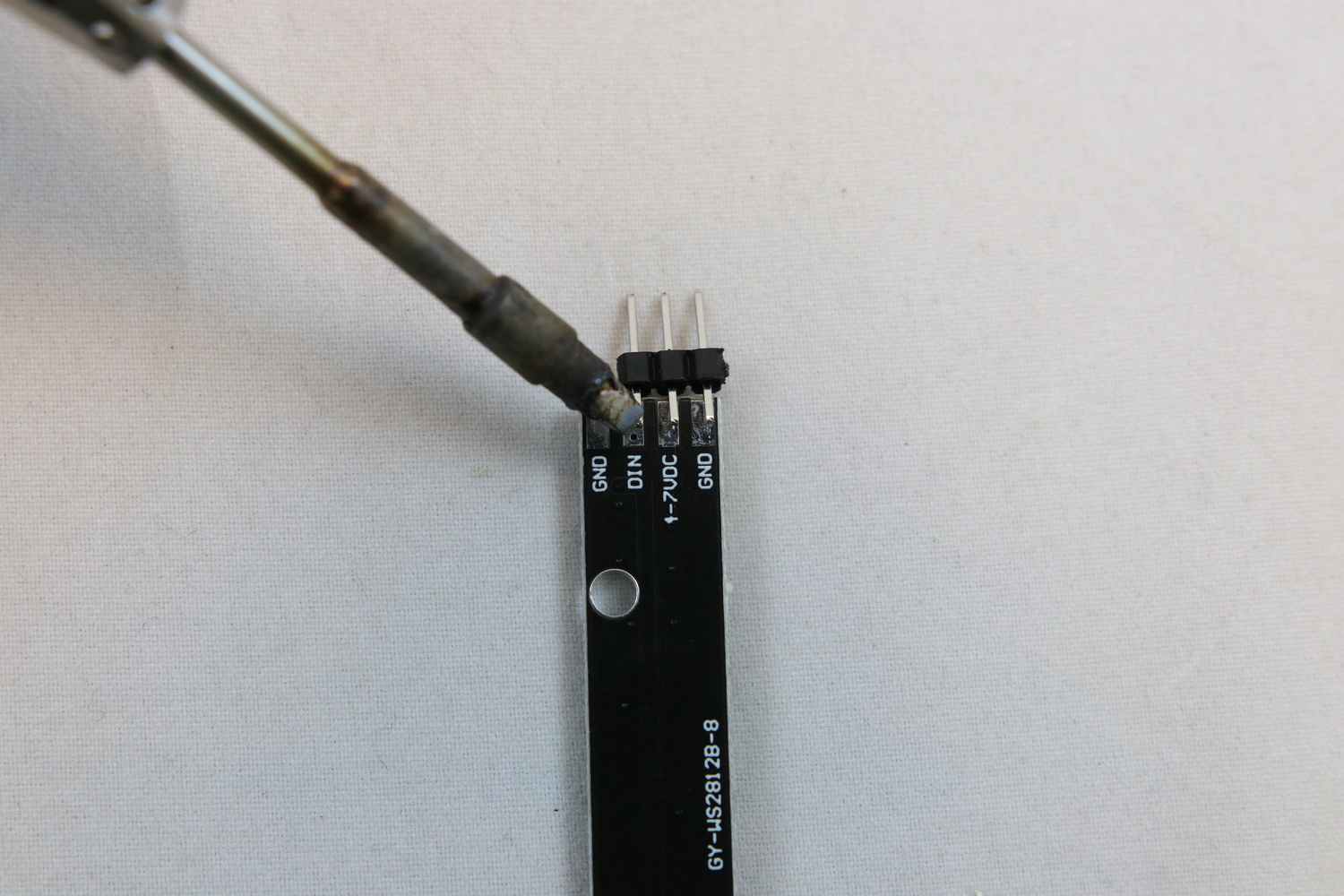
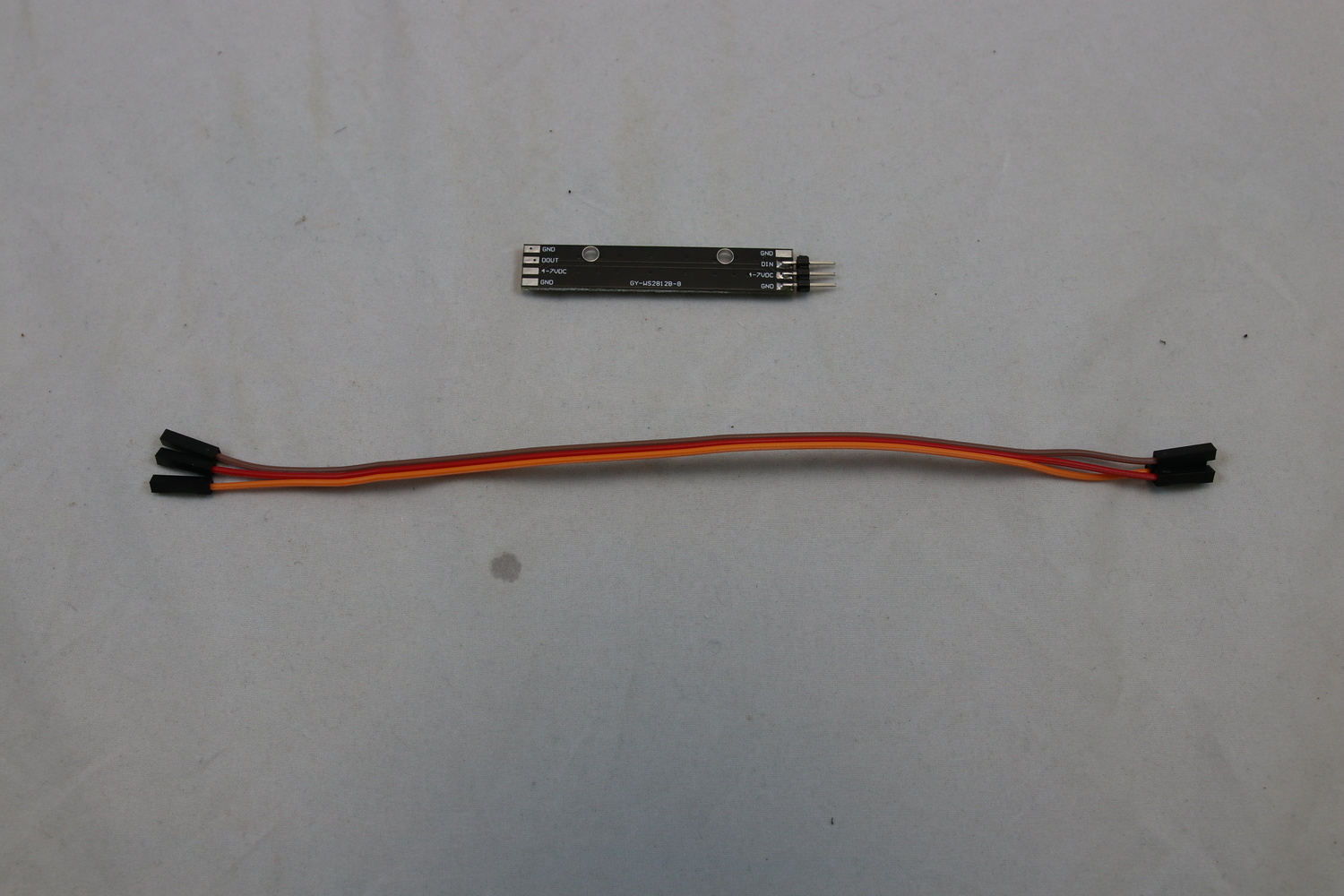
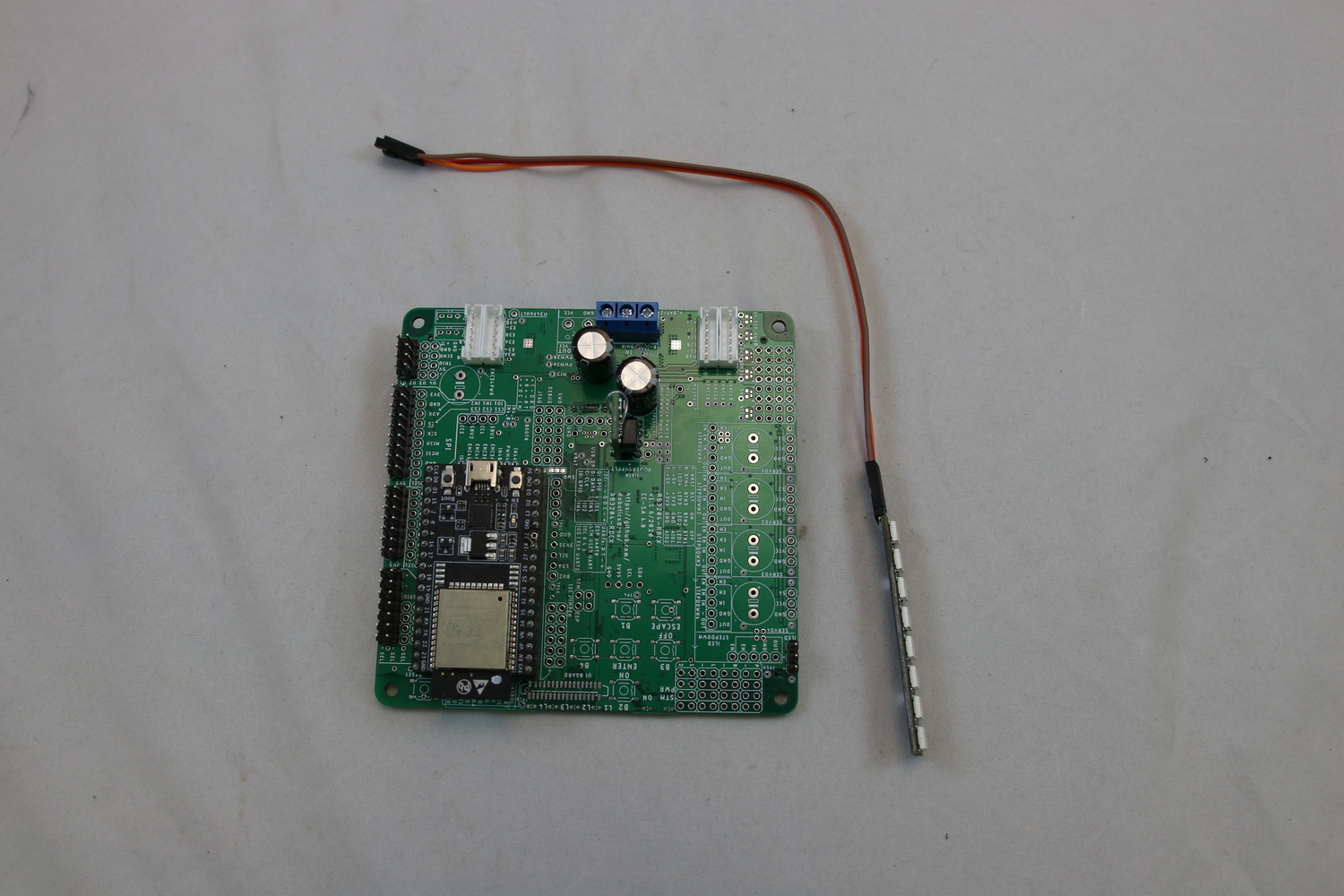
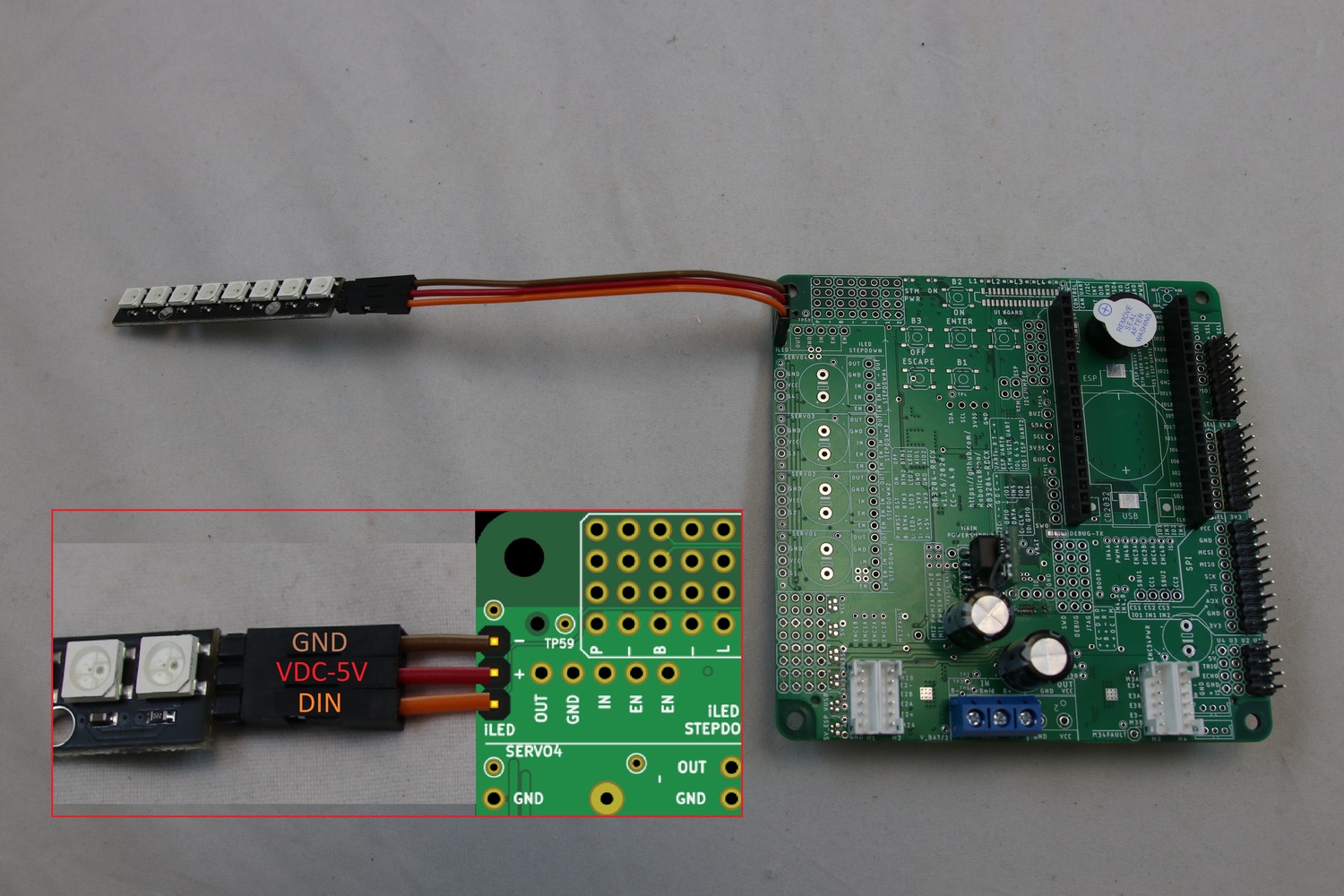
Zapojení RGB LED pásku
- 1x RGB LED pásek
- 1x třípinový pinhead
- 1x třípinový kabel

1
2
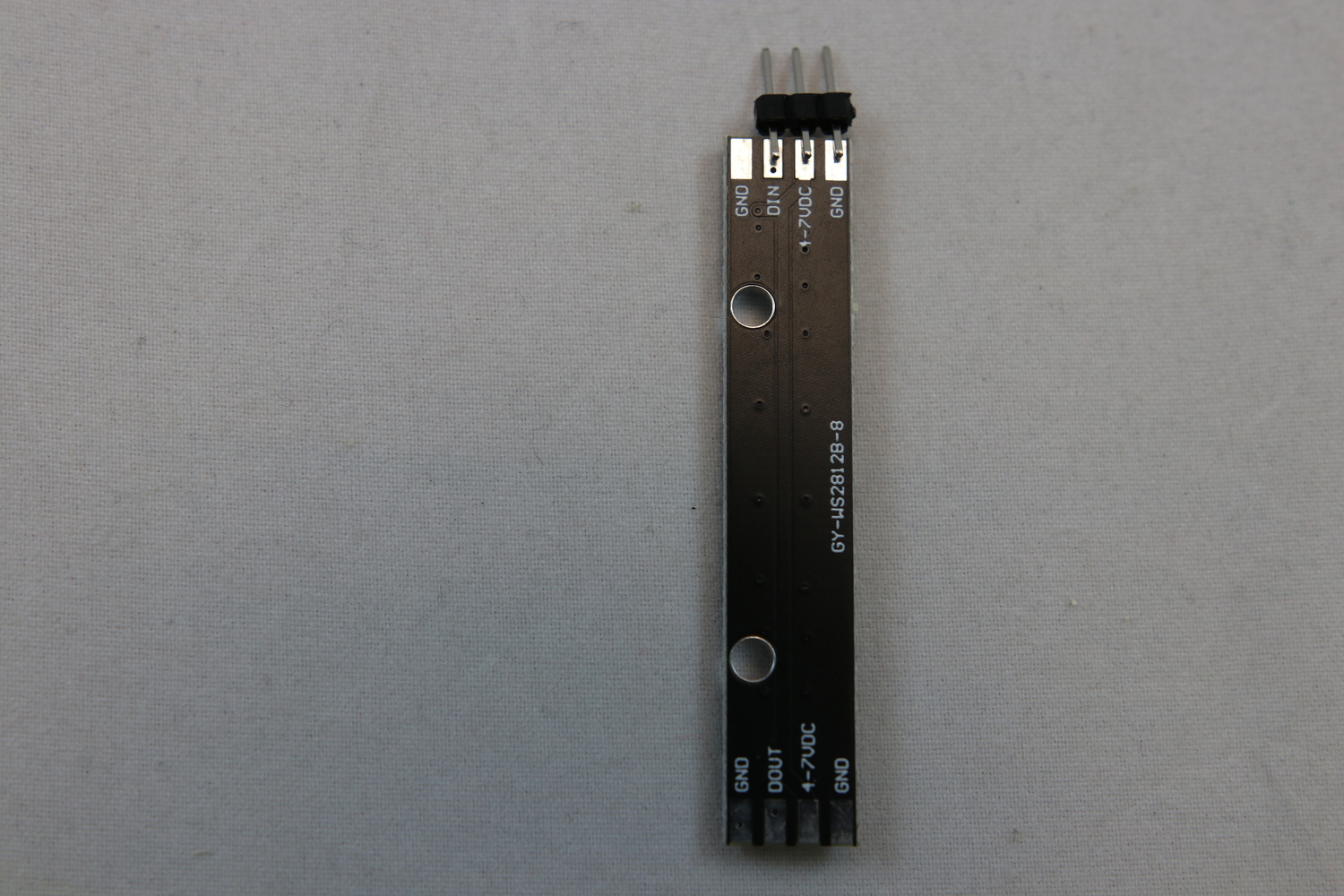
3
Prostřední pin musí být připájen na kontakt 4-7VDC, krejní piny na DIN a GND
4

5
6

7
8

9
10
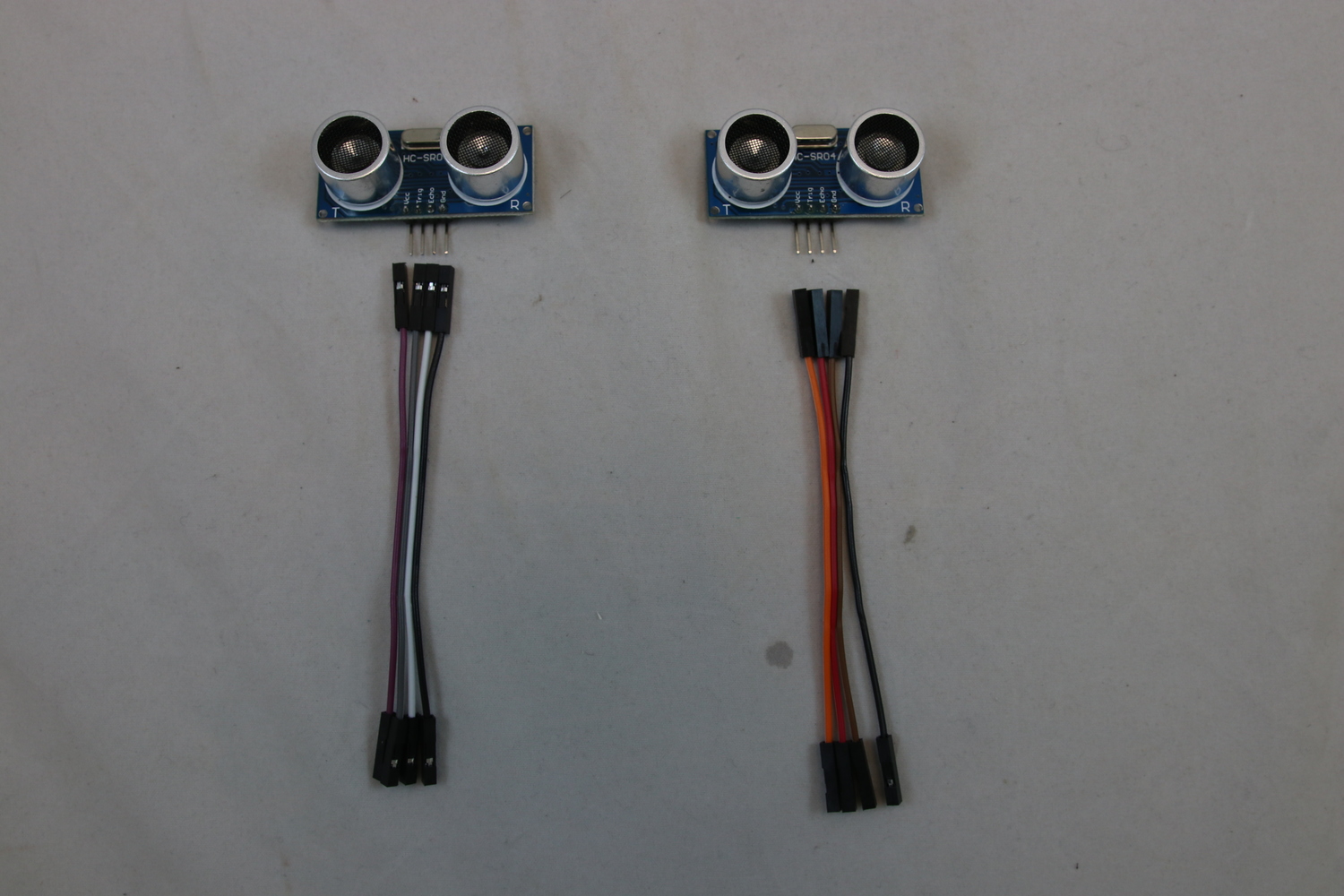
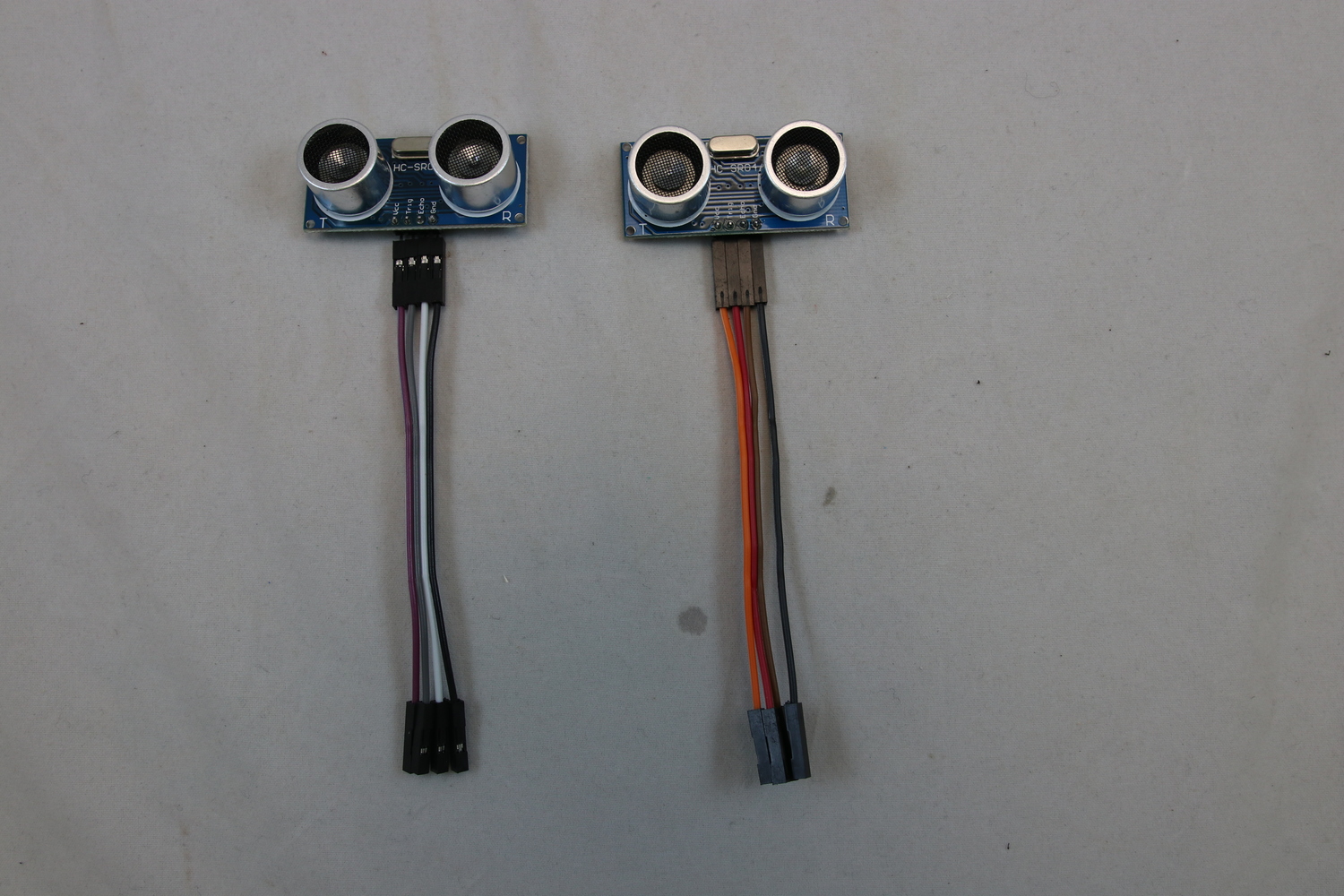
Zapojení ultrazvuků
- 2x ultrazvuk
- 2x čtyřpinový kabel

11
12
13
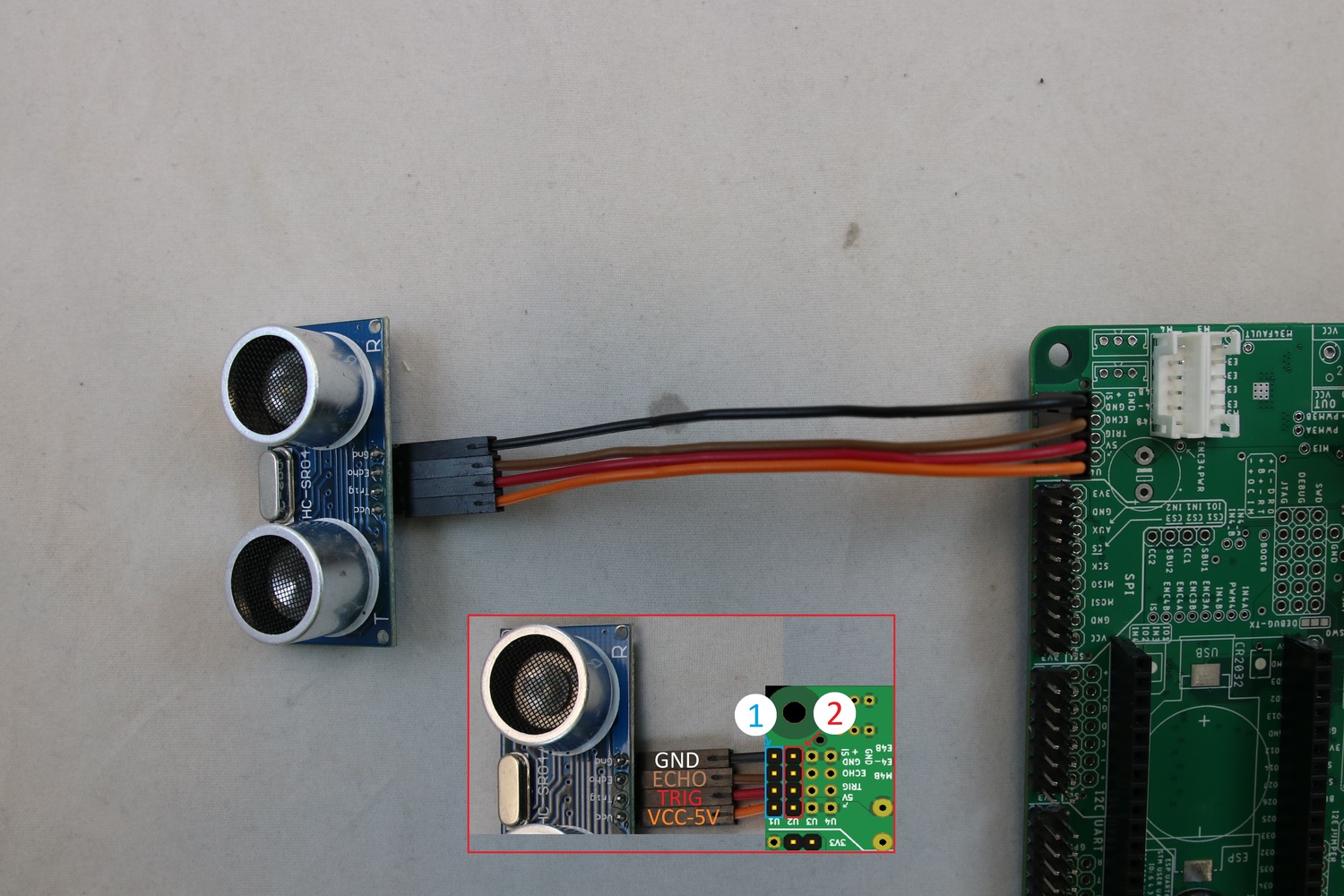
14
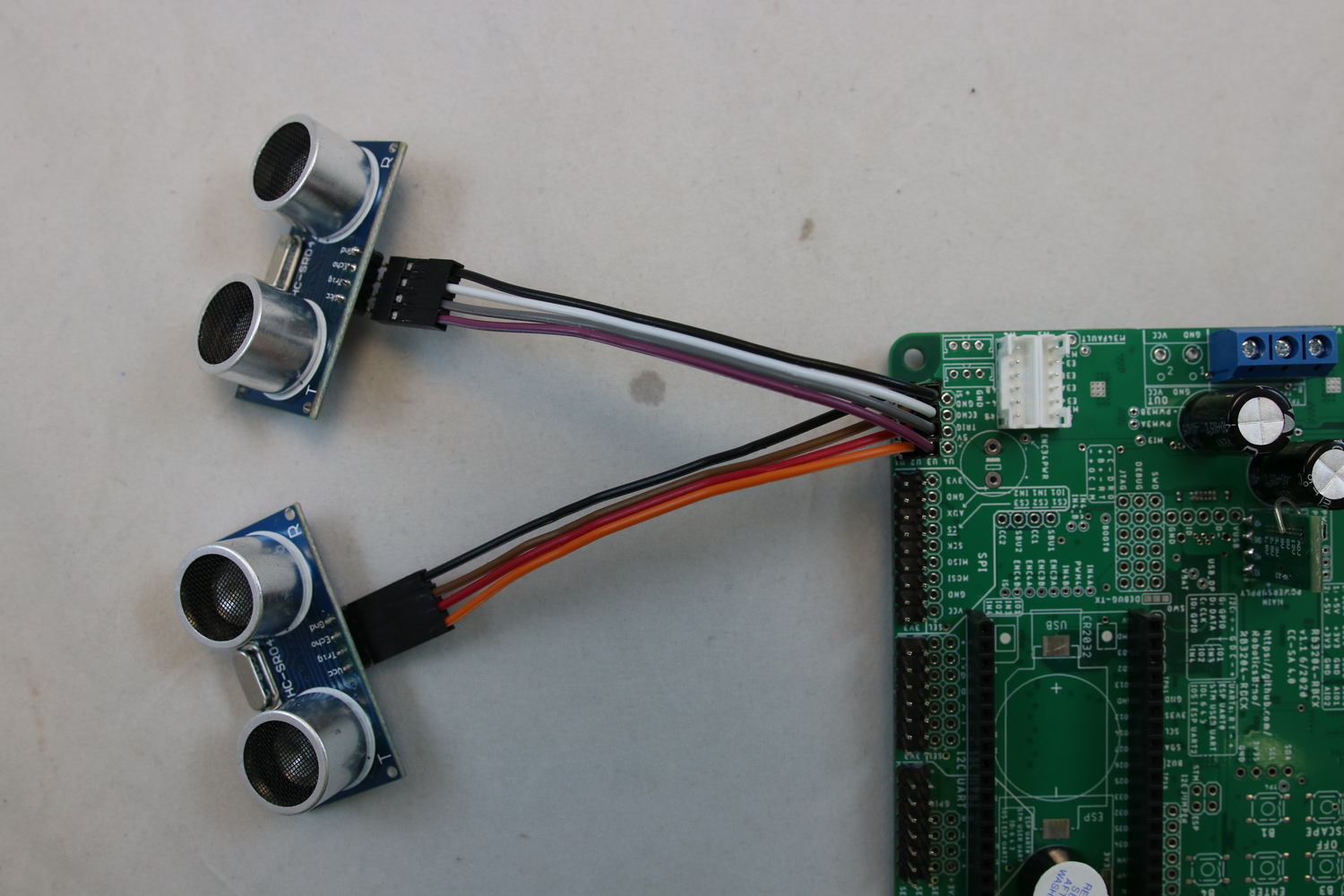
15
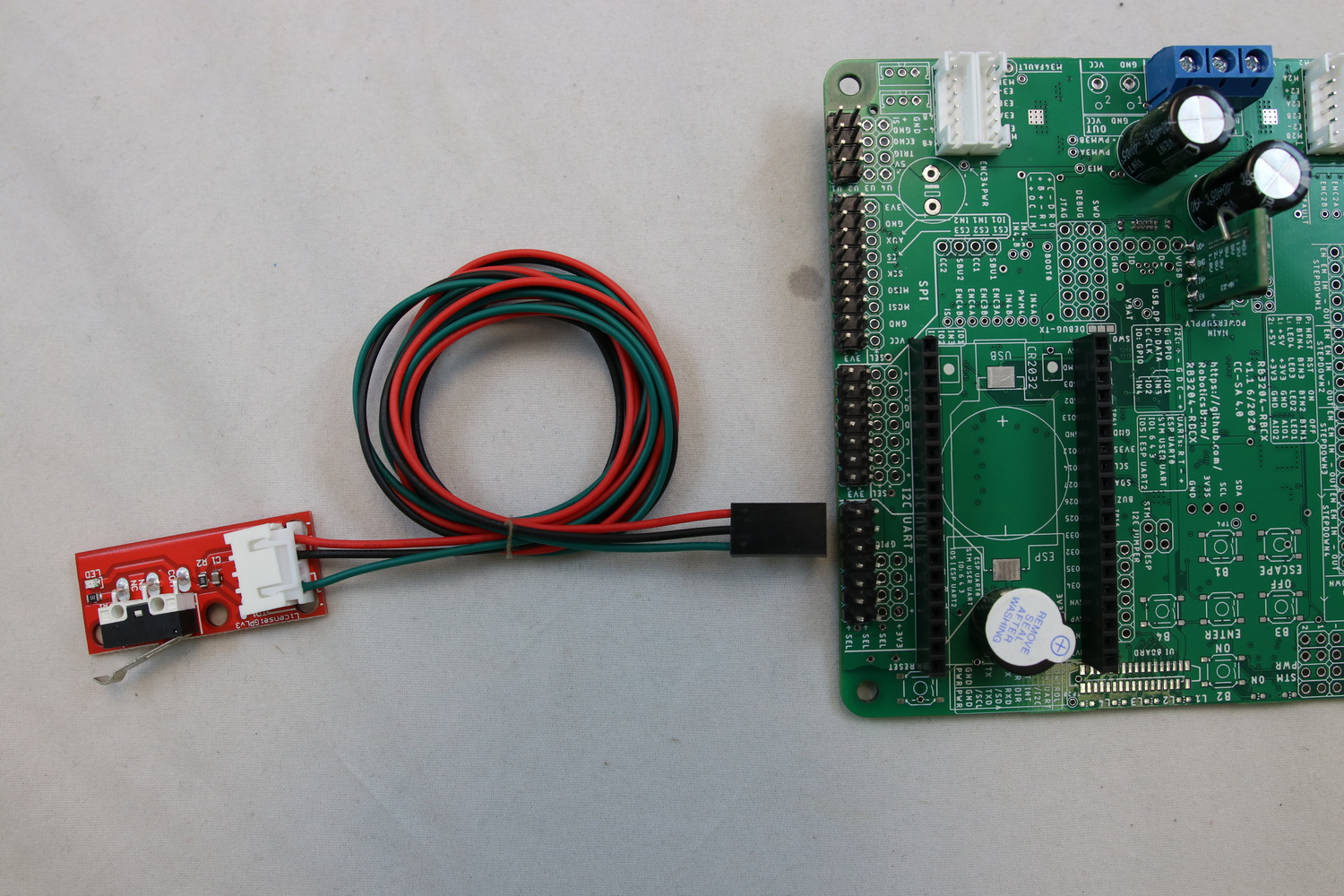
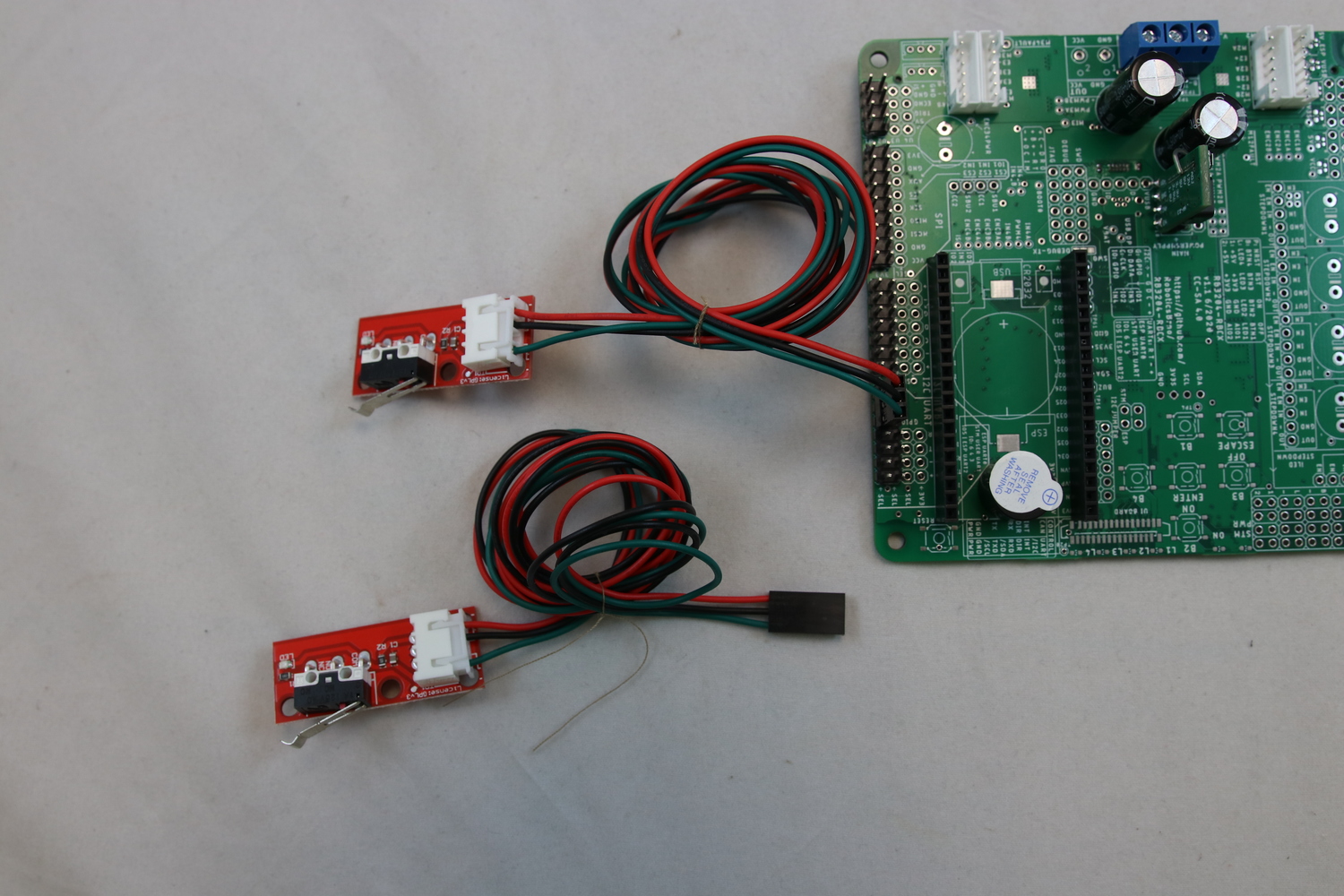
Zapojení tlačítek
- 2x tlačítková deska
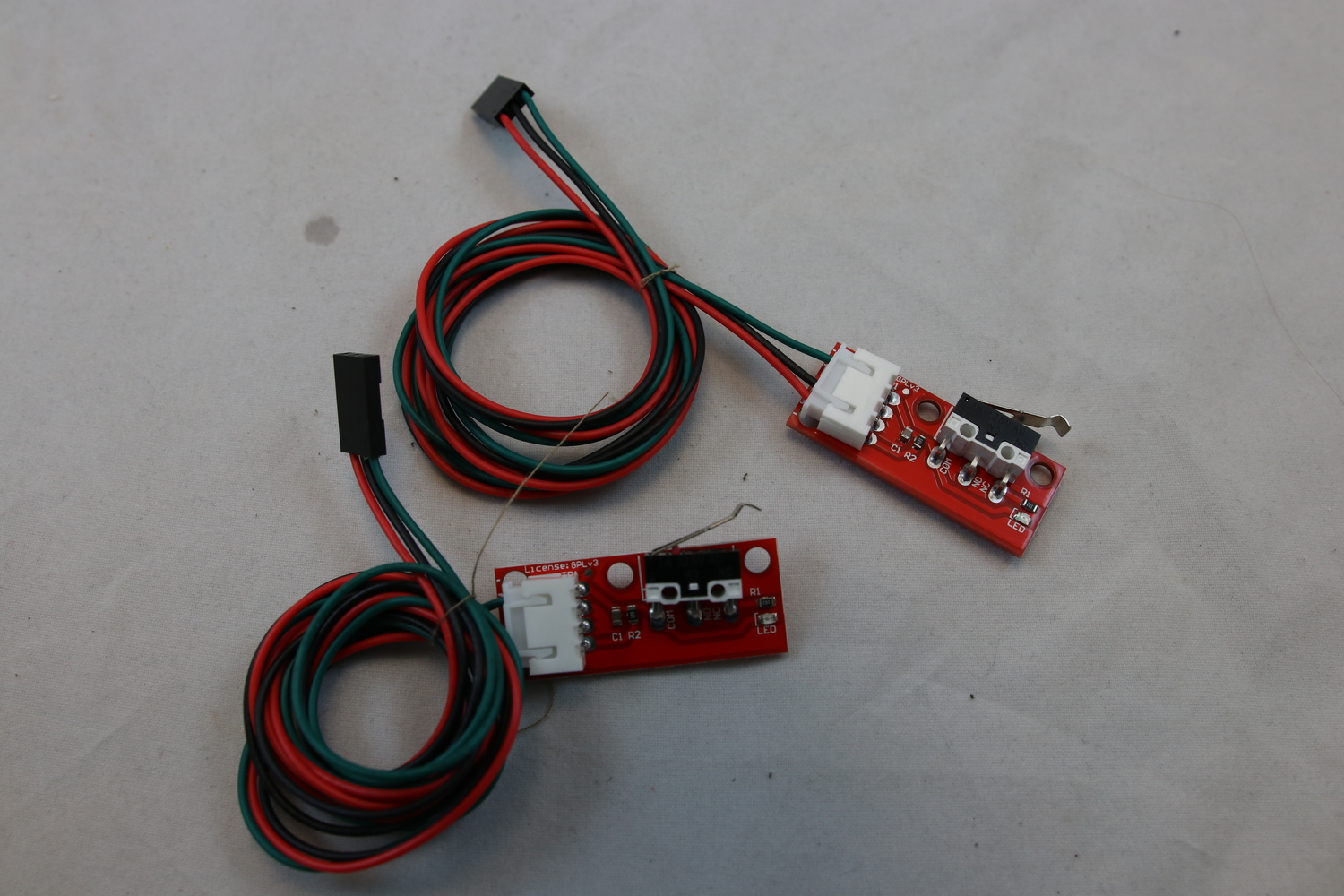
16
17
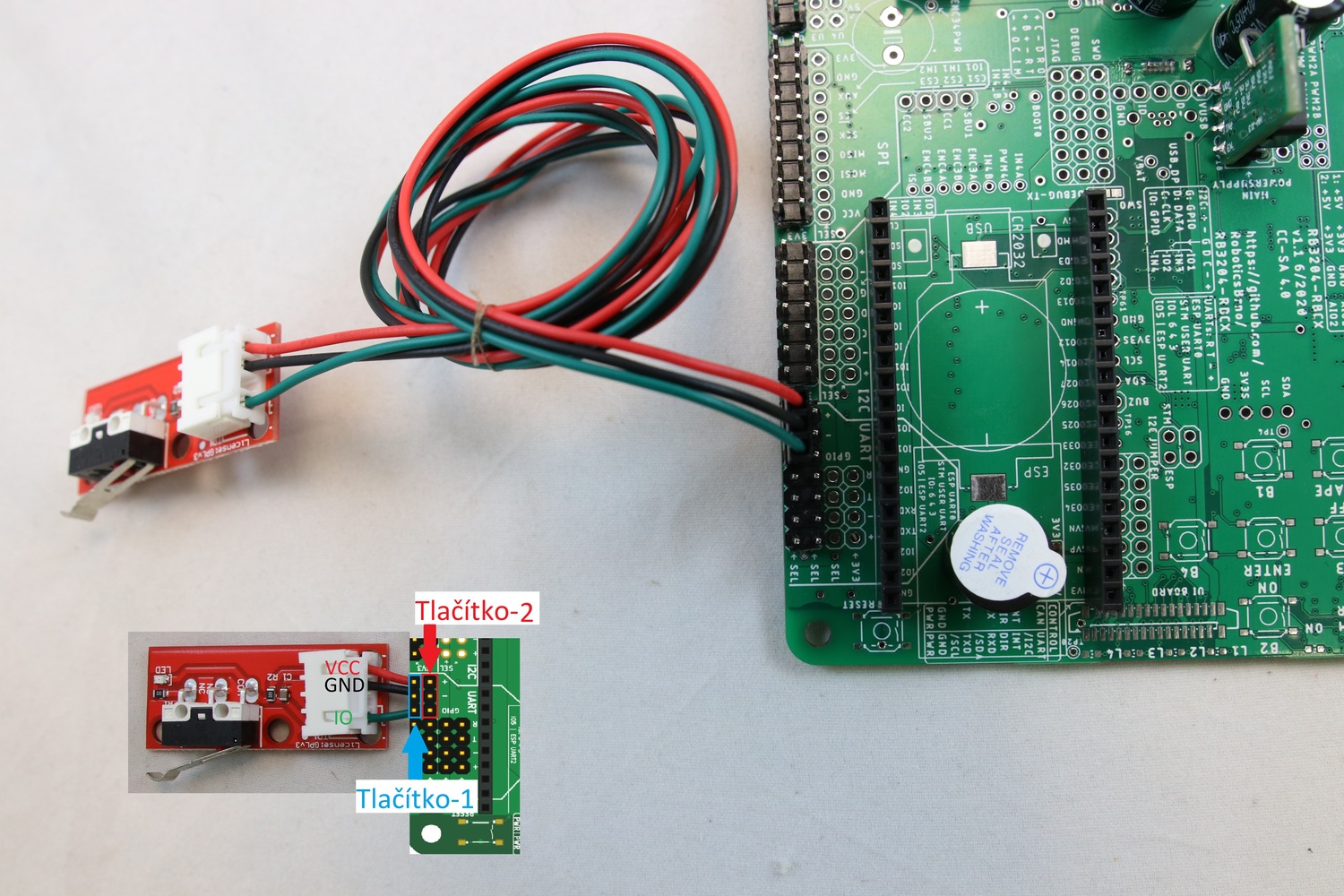
18
19
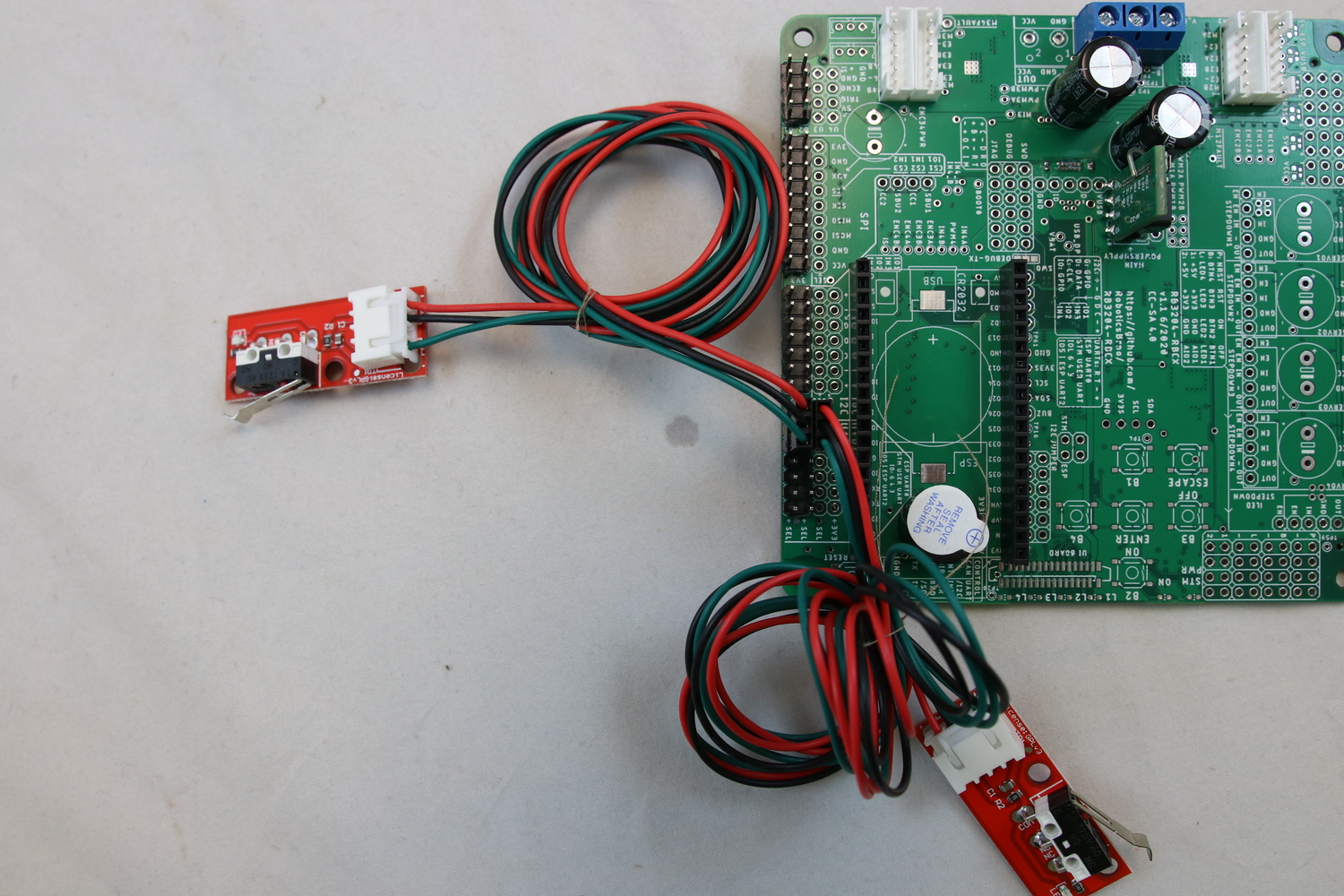
20
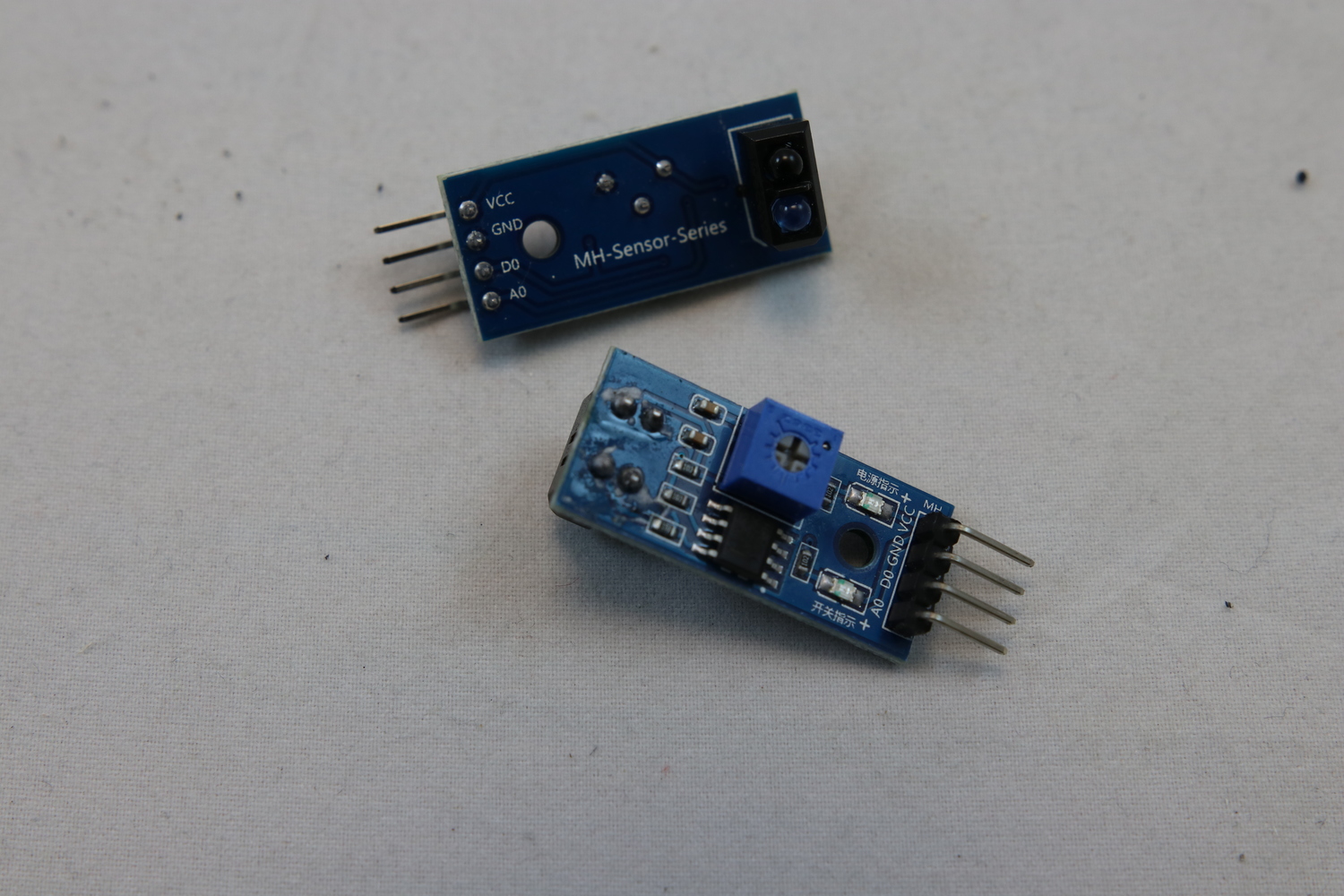
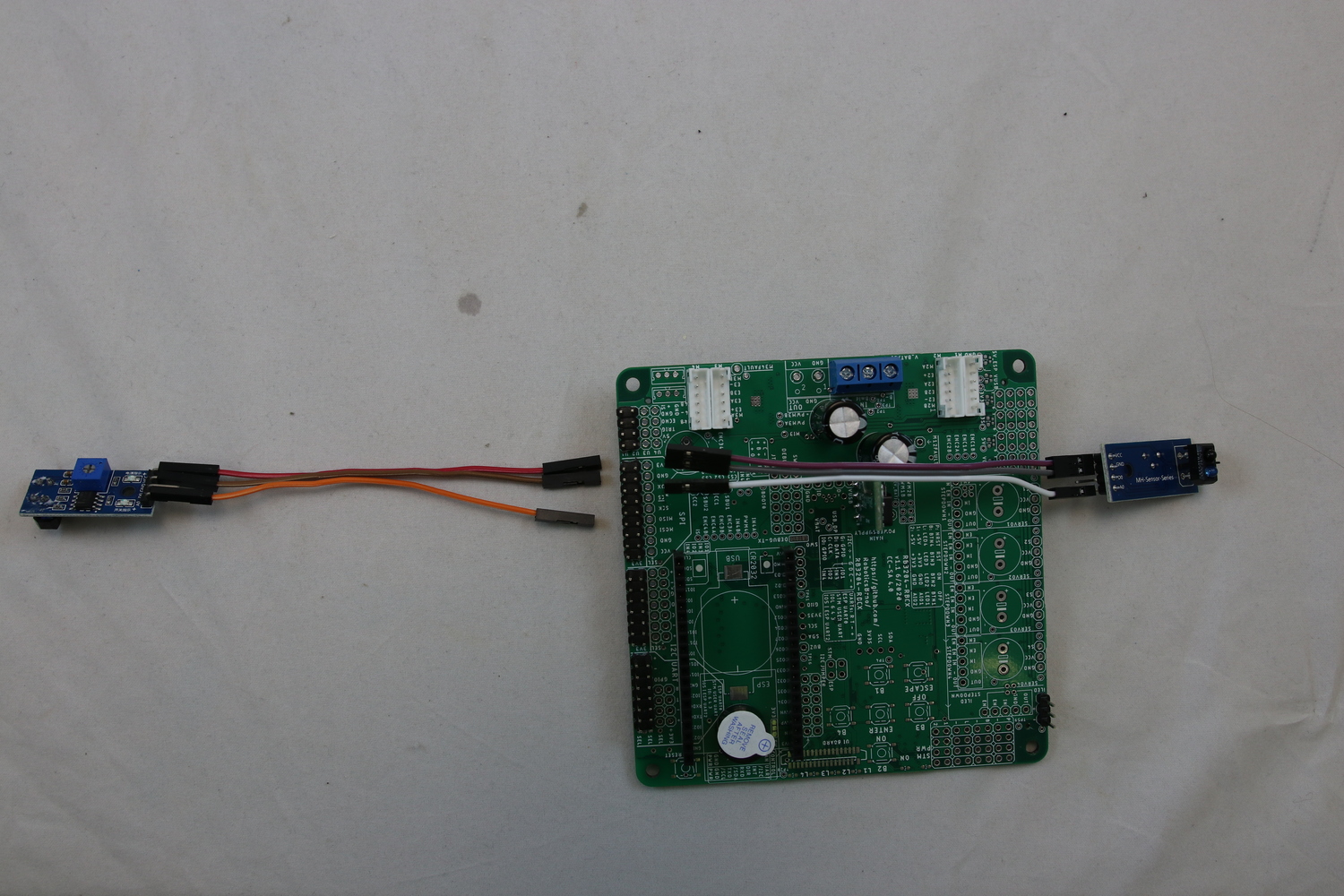
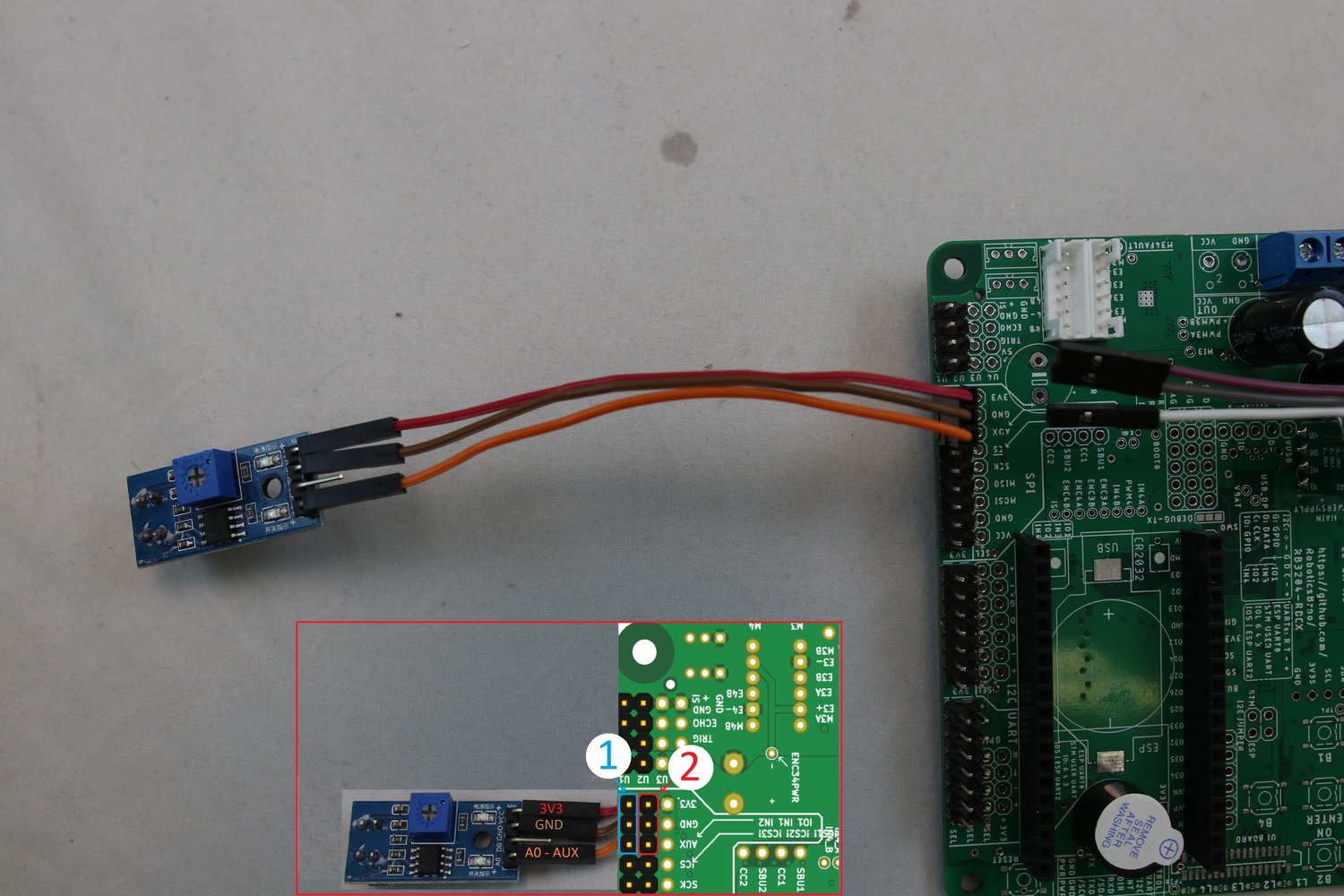
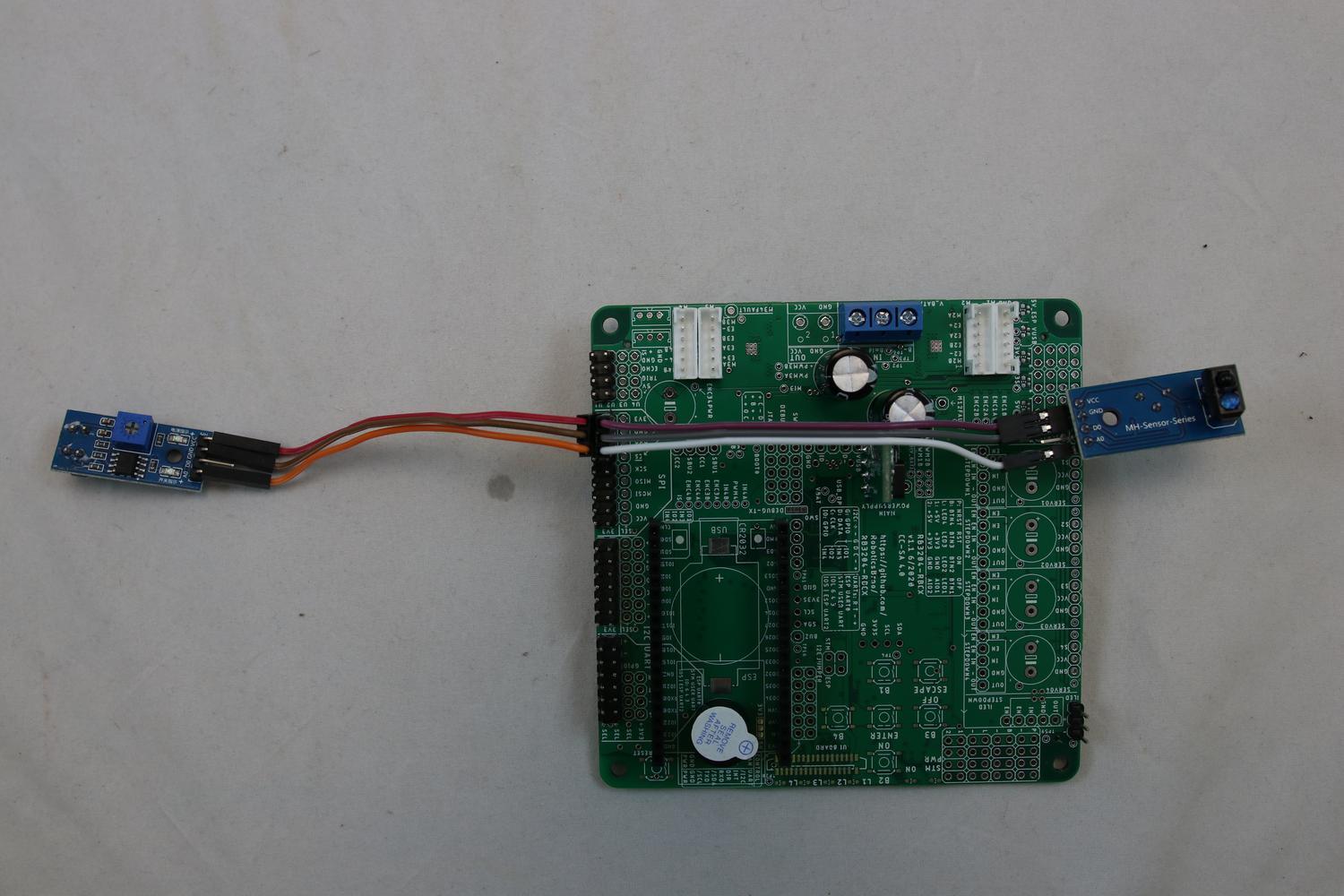
Senzor na čáru
- 2x senzor na čáru
- 2x třípinový kabel
21

22
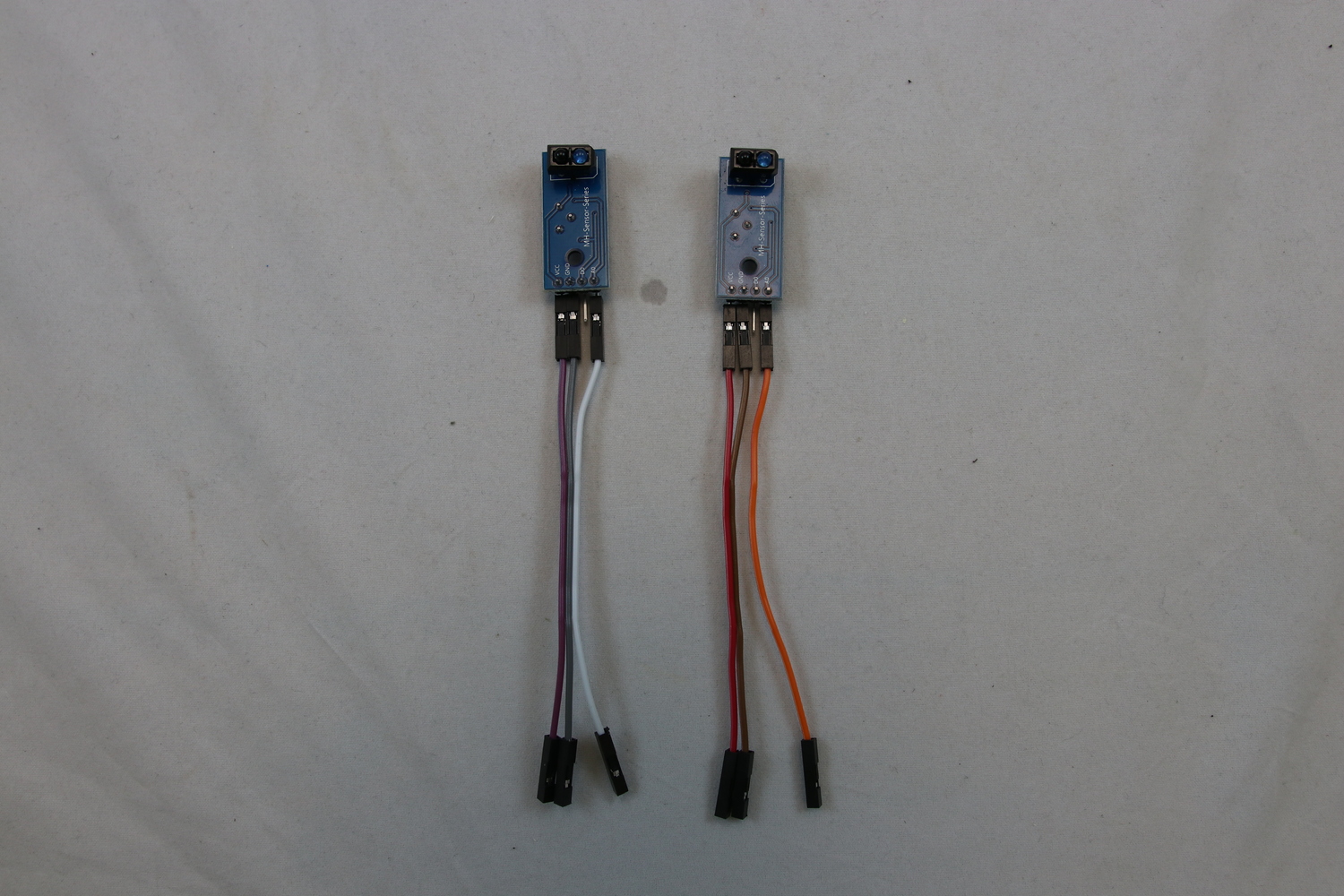
23
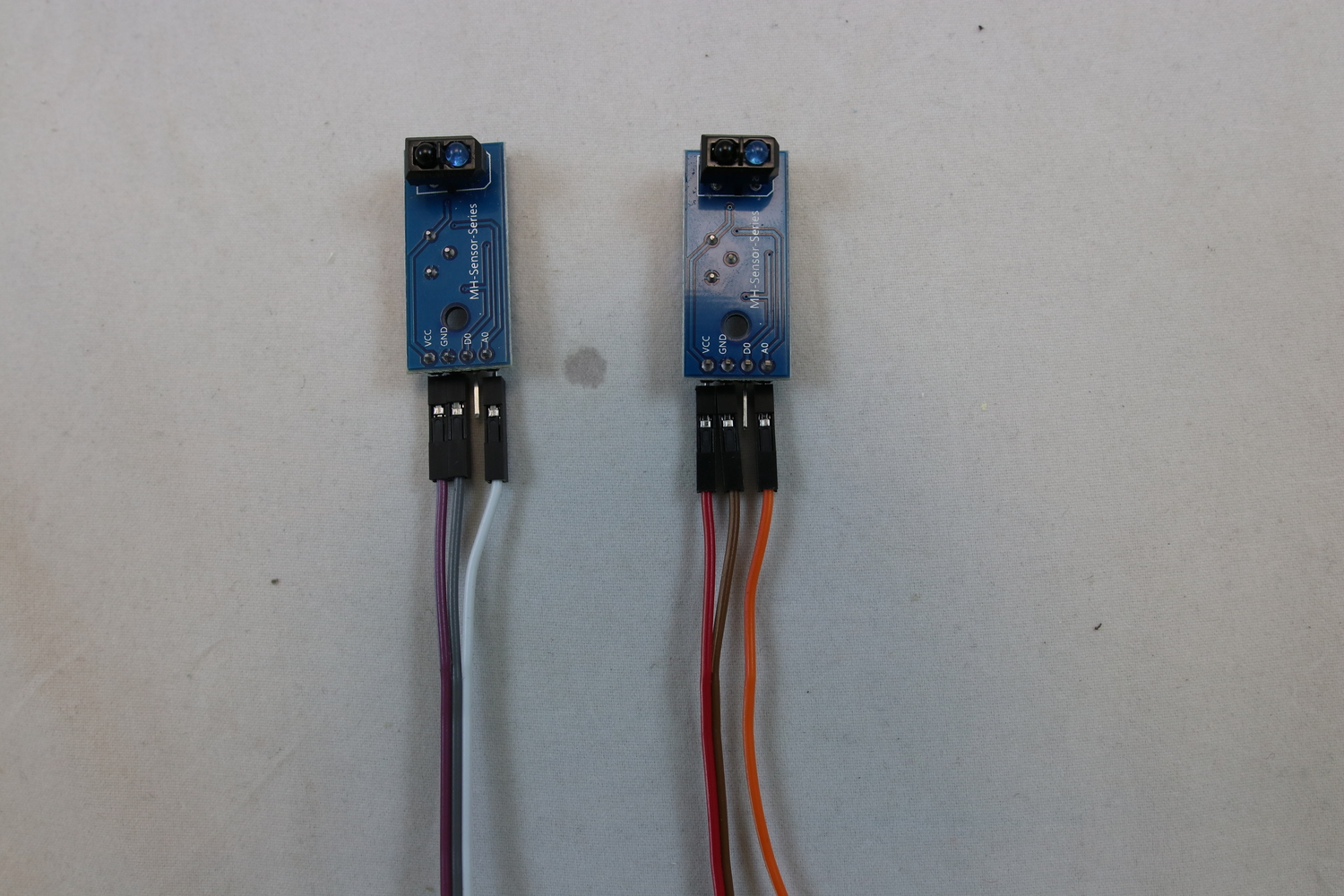
24
25
26
27